You might also like
- Fundamentals of SurveyingDocument611 pagesFundamentals of Surveyingrvkumar361969091% (58)
- Connecting RodDocument29 pagesConnecting Rodprasaad08No ratings yet
- Electrical Overstress (EOS): Devices, Circuits and SystemsFrom EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNo ratings yet
- Pole Placement1Document46 pagesPole Placement1masd100% (1)
- Understanding FRP BoomsDocument4 pagesUnderstanding FRP BoomsFernandoNo ratings yet
- Lab Pid Motor ControlDocument17 pagesLab Pid Motor ControlacajahuaringaNo ratings yet
- Dynamic model of manipulatorsDocument20 pagesDynamic model of manipulatorsbalkyderNo ratings yet
- Welding Procedure 6GDocument5 pagesWelding Procedure 6GTrinh DungNo ratings yet
- HW5Document2 pagesHW5Mohammad Iqbal Mahamad Amir100% (1)
- DQ TransformationDocument51 pagesDQ Transformationसुमित नेमा50% (2)
- Robust Control NotesDocument415 pagesRobust Control NotesjgkostasNo ratings yet
- Modeling Dynamic SystemsDocument48 pagesModeling Dynamic SystemssepehrNo ratings yet
- DC Motor State Space ModelDocument5 pagesDC Motor State Space ModelSelaRajNo ratings yet
- Lec8 Inverse KinematicsDocument32 pagesLec8 Inverse KinematicsbalkyderNo ratings yet
- Inverted Pendulum CartDocument64 pagesInverted Pendulum CartTushar SanwareyNo ratings yet
- Shear Strengthening of T-Beam With FRPDocument3 pagesShear Strengthening of T-Beam With FRPRal GLNo ratings yet
- Modelling of IM Using DQ TransformationDocument64 pagesModelling of IM Using DQ Transformationdivinelight100% (1)
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachFrom EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNo ratings yet
- Modelado Rotary Pendulum Workbook InstructorDocument60 pagesModelado Rotary Pendulum Workbook Instructorsolid34No ratings yet
- Abstract. The Balancing of An Inverted Pendulum byDocument5 pagesAbstract. The Balancing of An Inverted Pendulum byFariz AhdiatamaNo ratings yet
- Prepared By: Ms. Ethel D. Nabor, LPTDocument29 pagesPrepared By: Ms. Ethel D. Nabor, LPTJohn Ralf T. TorrejosNo ratings yet
- Top-Down Digital VLSI Design: From Architectures to Gate-Level Circuits and FPGAsFrom EverandTop-Down Digital VLSI Design: From Architectures to Gate-Level Circuits and FPGAsNo ratings yet
- Designing A Neuro PD With Gravity Compensation For Six Legged RobotDocument8 pagesDesigning A Neuro PD With Gravity Compensation For Six Legged RobotVishwanath KetkarNo ratings yet
- Unit I - Discrete State-Variable Technique Q.No Questions: Scalar Adder IntegratorDocument184 pagesUnit I - Discrete State-Variable Technique Q.No Questions: Scalar Adder IntegratorAgatha ChristieNo ratings yet
- 03 LagrangianDynamics 1Document28 pages03 LagrangianDynamics 1Terence DengNo ratings yet
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionFrom EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo ratings yet
- Rotary Pendulum Modeling and ControlDocument60 pagesRotary Pendulum Modeling and ControlLillyane RodriguesNo ratings yet
- Carta Psicometrica - CarrierDocument1 pageCarta Psicometrica - CarrierJonathan Andres0% (1)
- Inverted Pendulum On Cart SolutionDocument8 pagesInverted Pendulum On Cart SolutionMario R. KallabNo ratings yet
- Balancing Procedure Method - SKF ArticleDocument6 pagesBalancing Procedure Method - SKF ArticlebackvlackoNo ratings yet
- ControlExperiments - Precision Modular ServoDocument43 pagesControlExperiments - Precision Modular ServoNachoSainzNo ratings yet
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- CE037 Hydrology Engineering RAJ 000Document114 pagesCE037 Hydrology Engineering RAJ 000chandima priyamalNo ratings yet
- 3 Inverted Pendulum ProjectDocument26 pages3 Inverted Pendulum ProjectJoshua D JohnNo ratings yet
- System Simulation Using Matlab, State Plane PlotsDocument7 pagesSystem Simulation Using Matlab, State Plane PlotsmosictrlNo ratings yet
- HW1Document11 pagesHW1Tao Liu YuNo ratings yet
- Inverted PendulumDocument25 pagesInverted PendulumNassim DoukhiNo ratings yet
- Inverted PendulumDocument4 pagesInverted PendulumFerbNo ratings yet
- Modeling An Inverted PendulumDocument45 pagesModeling An Inverted Pendulumjunaid_honey83896770% (1)
- Solve Ex 2.0Document6 pagesSolve Ex 2.0Omar Abd El-RaoufNo ratings yet
- VLSI Project Report - Arithmetic Logical Unit using Verilog (ALUDocument7 pagesVLSI Project Report - Arithmetic Logical Unit using Verilog (ALUAnurag KharwarNo ratings yet
- Mechatronics (2015) Unit IIDocument38 pagesMechatronics (2015) Unit IIkishan100% (1)
- Main 3 PDF FreeDocument51 pagesMain 3 PDF FreeSantiagoo4life AliNo ratings yet
- Experiment No. 13 Open Ended Lab Inverted Pendulum Using State-Space MethodDocument5 pagesExperiment No. 13 Open Ended Lab Inverted Pendulum Using State-Space MethodSH NoorNo ratings yet
- Tut 3Document3 pagesTut 3mohanrajgupta1950% (2)
- Chapter 4 - Dynamic AnalysisDocument16 pagesChapter 4 - Dynamic AnalysisDimple Sharma100% (1)
- Cadence Nclaunch LabDocument86 pagesCadence Nclaunch Labsweety987No ratings yet
- Fundamentals of Lyapunov TheoryDocument9 pagesFundamentals of Lyapunov Theorygoitom01No ratings yet
- Lab Session 2: Mathematical Modeling and Solving Differential Equations in MATLABDocument36 pagesLab Session 2: Mathematical Modeling and Solving Differential Equations in MATLABmuhammadNo ratings yet
- Lec12 ControlDocument19 pagesLec12 ControlbalkyderNo ratings yet
- LQR Control Design for Vehicle Speed RegulationDocument14 pagesLQR Control Design for Vehicle Speed RegulationStefania Oliveira100% (1)
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDocument7 pagesSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngNo ratings yet
- Inverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyDocument6 pagesInverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyWan Nizam Wan SulaimanNo ratings yet
- Passivity Based ControlDocument25 pagesPassivity Based ControlRan HaoNo ratings yet
- Evaluation of The Transient Response of A DC MotorDocument6 pagesEvaluation of The Transient Response of A DC MotorNesuh MalangNo ratings yet
- Rotary Pendulum Workbook (Student) PDFDocument39 pagesRotary Pendulum Workbook (Student) PDFLillyane RodriguesNo ratings yet
- Arithmetic and Logic Unit (ALU) PDFDocument13 pagesArithmetic and Logic Unit (ALU) PDFnathulalusaNo ratings yet
- Laplace Transform ExamplesDocument19 pagesLaplace Transform Exampleshamza abdo mohamoudNo ratings yet
- InstaSPIN™ BLDC LabDocument16 pagesInstaSPIN™ BLDC LabTrong LeNo ratings yet
- IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7 , NO. 2, APRIL I991Document12 pagesIEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7 , NO. 2, APRIL I991maysamshNo ratings yet
- Adaptive Control: Presented by Harikrishna Satish.TDocument22 pagesAdaptive Control: Presented by Harikrishna Satish.THari ThotaNo ratings yet
- System Theory - Model ExamDocument2 pagesSystem Theory - Model ExamrajapandiyaNo ratings yet
- Jacobians and Manipulator SingularitiesDocument35 pagesJacobians and Manipulator SingularitiessivaeeinfoNo ratings yet
- Kinematic Analysis of 5 Dof Lynx ArmDocument6 pagesKinematic Analysis of 5 Dof Lynx ArmsathyaNo ratings yet
- Model Predictive Control For UAVsDocument24 pagesModel Predictive Control For UAVsJulio BVNo ratings yet
- Comparison of FOC and DTCDocument6 pagesComparison of FOC and DTCchienbkaNo ratings yet
- DH ParametersDocument18 pagesDH ParameterswasifazimNo ratings yet
- Wheeled Inverted Pendulum EquationsDocument10 pagesWheeled Inverted Pendulum EquationsMunzir ZafarNo ratings yet
- HMT Mod 5 NotesDocument66 pagesHMT Mod 5 Notesprasaad08No ratings yet
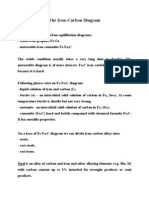
- Iron-Carbon DiagramDocument11 pagesIron-Carbon DiagramrampradNo ratings yet
- Energies: Emission Characteristics of A CI Engine Running With A Range of Biodiesel FeedstocksDocument17 pagesEnergies: Emission Characteristics of A CI Engine Running With A Range of Biodiesel FeedstocksArul JONo ratings yet
- 10th Maths em 24-Jul-2016 21-44-08 - WatermarkedDocument1 page10th Maths em 24-Jul-2016 21-44-08 - Watermarkedprasaad08No ratings yet
- FIE FormDocument10 pagesFIE Formprasaad08No ratings yet
- NotesDocument20 pagesNotesprasaad08No ratings yet
- Question Bank III B.Tech-II Sem Design of Machine Members-Ii Unit - I A Design of Curved Beams Short Answer QuestionsDocument11 pagesQuestion Bank III B.Tech-II Sem Design of Machine Members-Ii Unit - I A Design of Curved Beams Short Answer Questionsprasaad08No ratings yet
- GearsDocument44 pagesGearsprasaad08No ratings yet
- ES 2 MarksDocument17 pagesES 2 Marksprasaad08No ratings yet
- Experimental Studies On The Combustion and Emission Characteristics of A Diesel EngineFuelled With Used Cooking Oil Methyl Esterand Its Diesel BlendsDocument7 pagesExperimental Studies On The Combustion and Emission Characteristics of A Diesel EngineFuelled With Used Cooking Oil Methyl Esterand Its Diesel Blendsprasaad08No ratings yet
- 9A01304 Fluid MechanicsDocument1 page9A01304 Fluid MechanicssivabharathamurthyNo ratings yet
- IJEE 11 v4n5Document12 pagesIJEE 11 v4n5prasaad08No ratings yet
- Design of Machine Members-IIDocument8 pagesDesign of Machine Members-IIprasaad08No ratings yet
- After Gate Guide 2015Document100 pagesAfter Gate Guide 2015JaydeepRanipaNo ratings yet
- Aluminium: A Large Aluminium Billet From Which Wrought Products Will Be ProducedDocument38 pagesAluminium: A Large Aluminium Billet From Which Wrought Products Will Be Producedprasaad08No ratings yet
- 9A01303 SurveyingDocument4 pages9A01303 Surveyingprasaad08No ratings yet
- Nanotechnology: Course: B.E & B.Tech Subject: APPLIED CHEMISTRY Unit: VDocument10 pagesNanotechnology: Course: B.E & B.Tech Subject: APPLIED CHEMISTRY Unit: Vprasaad08No ratings yet
- Cad Cam Viva QueDocument5 pagesCad Cam Viva QueJeeva KarunyaNo ratings yet
- Production Engineering Syllabus (1) - 2Document34 pagesProduction Engineering Syllabus (1) - 2prasaad08No ratings yet
- M.Tech - F Semester Regulor Exqminotions April 20t5: TimetobleDocument1 pageM.Tech - F Semester Regulor Exqminotions April 20t5: Timetobleprasaad08No ratings yet
- YVC RaoDocument98 pagesYVC Raoprasaad08No ratings yet
- NMDC Et AdvertisementDocument8 pagesNMDC Et AdvertisementbecbellaryNo ratings yet
- DV03PUB1 Study GuideDocument5 pagesDV03PUB1 Study Guideprasaad08No ratings yet
- Jntua B.tech Eee r13 SyllabusDocument116 pagesJntua B.tech Eee r13 Syllabusprasaad08No ratings yet
- Cad Cam Viva QueDocument5 pagesCad Cam Viva QueJeeva KarunyaNo ratings yet
- Lecture 1Document6 pagesLecture 1prasaad08No ratings yet
- Production Engineering Syllabus (1) - 2Document34 pagesProduction Engineering Syllabus (1) - 2prasaad08No ratings yet
- R09 B.Tech III Year I Semester Machine Elements ExamDocument1 pageR09 B.Tech III Year I Semester Machine Elements Examprasaad08No ratings yet
- Column C section and tie detailsDocument1 pageColumn C section and tie detailsبه شدار ازاد عبدالرحمن عليNo ratings yet
- POLARONS: Electron-Phonon Interactions in Polar CrystalsDocument31 pagesPOLARONS: Electron-Phonon Interactions in Polar CrystalscaccaNo ratings yet
- Module 1 RTS PDFDocument48 pagesModule 1 RTS PDFPràmêyá HëgdēNo ratings yet
- Secondary or Machining ProcessDocument49 pagesSecondary or Machining ProcessHar QuinNo ratings yet
- Performance Evaluation of Elevated Storage Reservoir With Hybrid StagingDocument11 pagesPerformance Evaluation of Elevated Storage Reservoir With Hybrid StagingVelumani sNo ratings yet
- Muhammad Imran YousufDocument1 pageMuhammad Imran YousufMuhammad Irfan YousufNo ratings yet
- High Frequency Circuit Design CourseDocument5 pagesHigh Frequency Circuit Design CourseadauNo ratings yet
- Carlye: Application Guide 575-012 Carlyle Control Module (CCM) Capacity and Protection ControlDocument59 pagesCarlye: Application Guide 575-012 Carlyle Control Module (CCM) Capacity and Protection ControlDigeo MachadoNo ratings yet
- InterpolationDocument7 pagesInterpolationElianne GabbayNo ratings yet
- Gain Margin and Phase Margin Physical MeaningDocument2 pagesGain Margin and Phase Margin Physical MeaningSaad MemonNo ratings yet
- 3bit Flash ADC 180nmDocument6 pages3bit Flash ADC 180nmMurali ShettyNo ratings yet
- Molecular Shapes and BondingDocument24 pagesMolecular Shapes and BondingSandunil JayasingheNo ratings yet
- Penguard HB - English (Uk) - Issued.06.12.2007Document4 pagesPenguard HB - English (Uk) - Issued.06.12.2007Mohamed FaragNo ratings yet
- Ib Math - Sl 11 Name:: 학년 Mid TestDocument11 pagesIb Math - Sl 11 Name:: 학년 Mid Testhansaram_1No ratings yet
- CLMD4A Science8Document39 pagesCLMD4A Science8GreyNo ratings yet
- Where Is There Light in This Room?Document18 pagesWhere Is There Light in This Room?Casmara LyNo ratings yet
- 4 D8722 DEd 01Document28 pages4 D8722 DEd 01Dhani AmeliaNo ratings yet
- Machining Processes SyllabusDocument2 pagesMachining Processes SyllabusshailkhanNo ratings yet
- International Journal of Mechanical Sciences: Chong Li, Hui-Shen Shen, Hai Wang, Zhefeng YuDocument10 pagesInternational Journal of Mechanical Sciences: Chong Li, Hui-Shen Shen, Hai Wang, Zhefeng Yuali_biscoeatNo ratings yet
- Reality in A Metaphysical ModelDocument17 pagesReality in A Metaphysical ModelLecks90No ratings yet