You might also like
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Em 1 TestingDocument13 pagesEm 1 TestingAravindNo ratings yet
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveDocument5 pagesPCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelNo ratings yet
- Electrical Machines I: Efficiency and All Day Efficiency of TransformersDocument9 pagesElectrical Machines I: Efficiency and All Day Efficiency of TransformersShraddha RautNo ratings yet
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968From EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968No ratings yet
- Questions & Answers On S-Domain AnalysisDocument33 pagesQuestions & Answers On S-Domain Analysiskibrom atsbhaNo ratings yet
- Self Switch Power SupplyDocument1 pageSelf Switch Power Supplymontes24No ratings yet
- Automatic Control of Street LightDocument63 pagesAutomatic Control of Street LightMani RaoNo ratings yet
- Basic Motor Control GuideDocument17 pagesBasic Motor Control GuideHeizen BulanNo ratings yet
- Single Phase Induction MotorDocument7 pagesSingle Phase Induction MotorReeta Dutta100% (1)
- 360 Topic 6 DC MachineDocument33 pages360 Topic 6 DC MachineAchsan ArfandiNo ratings yet
- Pe Final Ex SS 2010-2011Document8 pagesPe Final Ex SS 2010-2011Saif Uddin100% (1)
- Chapter Four: DC-DC Conversion: DC ChoppersDocument55 pagesChapter Four: DC-DC Conversion: DC Choppersfor lifeNo ratings yet
- Ee TransformersDocument24 pagesEe TransformersAnonymous 1VhXp1No ratings yet
- Types of Single Phase Induction MotorDocument12 pagesTypes of Single Phase Induction Motorkarthikeyan249No ratings yet
- Transducer: Controller (Control Theory)Document5 pagesTransducer: Controller (Control Theory)Farrukh JamilNo ratings yet
- Modeling Transformers With Internal Incipient FaultsDocument18 pagesModeling Transformers With Internal Incipient FaultsDebajyoti Mishra100% (1)
- Self-Switching Power Supply Design for Safety and EfficiencyDocument16 pagesSelf-Switching Power Supply Design for Safety and Efficiencyharsha_robo99100% (2)
- Three Phase Induction Motor Interview Questions 2 1Document24 pagesThree Phase Induction Motor Interview Questions 2 1Kulshresth Joshi100% (1)
- Experiment 4 - Three Phase Uncontrolled RectifierDocument13 pagesExperiment 4 - Three Phase Uncontrolled RectifierAaaa DdddNo ratings yet
- Eee-V-dcmachines and Synchronous Machines (10ee54) - SolutionDocument73 pagesEee-V-dcmachines and Synchronous Machines (10ee54) - SolutionchaitanyaNo ratings yet
- Induction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFDocument7 pagesInduction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFbalajiNo ratings yet
- Lecture-5 Modeling of Electromechanical SystemsDocument19 pagesLecture-5 Modeling of Electromechanical Systemsusama asifNo ratings yet
- Amplifier ServoDocument3 pagesAmplifier ServoinputzNo ratings yet
- HVDC Unit IIIDocument22 pagesHVDC Unit IIISreenivas Reddy BodimallaNo ratings yet
- Induction Motor Lab ManualDocument11 pagesInduction Motor Lab ManualRabah ZaimeddineNo ratings yet
- PLC & 8051Document22 pagesPLC & 8051Sunil Patel100% (1)
- Speed Control of DC Motor Using PID Smart ControllerDocument10 pagesSpeed Control of DC Motor Using PID Smart ControllerEngr Aadi Awan SamsaalNo ratings yet
- EE 442 642 IntroductionDocument14 pagesEE 442 642 IntroductionUSERNAME12340987No ratings yet
- Ee8004 Modern Power Converters SyllabusDocument2 pagesEe8004 Modern Power Converters SyllabussignjpcoeNo ratings yet
- Introduction to Power Electronics ChapterDocument9 pagesIntroduction to Power Electronics ChapterSouvik GanguliNo ratings yet
- Experiment 2 - KVL - KCLDocument3 pagesExperiment 2 - KVL - KCLDhadkane Azad HainNo ratings yet
- Classification of Electric Motors: Electrical Motors Basic ComponentsDocument89 pagesClassification of Electric Motors: Electrical Motors Basic ComponentsSarada Sankar DasNo ratings yet
- Inverter PDFDocument84 pagesInverter PDFVenkedesh RNo ratings yet
- Power Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Document69 pagesPower Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Sankaran Nampoothiri KrishnanNo ratings yet
- Implementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerDocument8 pagesImplementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerMawunyo100% (1)
- Ch7 Induction MotorDocument82 pagesCh7 Induction MotorMuhammad R ShihadehNo ratings yet
- Multistage Transistor AmplifierDocument23 pagesMultistage Transistor AmplifierHemant SaraswatNo ratings yet
- Three-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWDocument26 pagesThree-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWCarlos Roberto Amaya Rodriguez100% (1)
- Puter Aided Electrical Drawing SyllabusDocument4 pagesPuter Aided Electrical Drawing SyllabusVikram RaoNo ratings yet
- Glover 10 ExDocument13 pagesGlover 10 ExAseel Bait MaditNo ratings yet
- What Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?Document14 pagesWhat Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?BALAJINo ratings yet
- Topic 01 - Assignment 3 - Titration - Tutors Copy (2013)Document4 pagesTopic 01 - Assignment 3 - Titration - Tutors Copy (2013)Turfy YanNo ratings yet
- Lab ReportDocument84 pagesLab ReportusmanzahidNo ratings yet
- UNIT-1 of HVEDocument8 pagesUNIT-1 of HVEAayush Patidar100% (2)
- Filter DesignDocument6 pagesFilter Designnaga7389No ratings yet
- Fuzzy Logic Control of Three Phase Induction Motor: A ReviewDocument3 pagesFuzzy Logic Control of Three Phase Induction Motor: A ReviewInternational Journal of Innovative Science and Research Technology100% (1)
- Flow Control Trainer (GUNT)Document3 pagesFlow Control Trainer (GUNT)Harry HutamaNo ratings yet
- MTDC System PDFDocument17 pagesMTDC System PDFAshok Kumar67% (3)
- Armature ReactionDocument26 pagesArmature ReactionAouthithiye MeghaNo ratings yet
- chp7 3 Economic Dispatch PDFDocument11 pageschp7 3 Economic Dispatch PDFdo3llah100% (1)
- Emeng 3131 Electrical Power Systems: Fundamentals of Power System Yoseph MekonnenDocument36 pagesEmeng 3131 Electrical Power Systems: Fundamentals of Power System Yoseph MekonnenmichaelNo ratings yet
- Power Electronics Project TitlesDocument4 pagesPower Electronics Project Titlesvmurali.infoNo ratings yet
- Speed Control of DC MotorDocument18 pagesSpeed Control of DC Motorkrishnareddy_chintalaNo ratings yet
- Speed Control of MotorDocument5 pagesSpeed Control of MotorPrabuddha ChakrabortyNo ratings yet
- Lecture 6Document31 pagesLecture 6amanuel abrehaNo ratings yet
- Controlvalvesandactuators 090617042347 Phpapp01Document34 pagesControlvalvesandactuators 090617042347 Phpapp01Vijaya LakshmiNo ratings yet
- Arsenal Have Five Away Games After Champions League FixturesDocument15 pagesArsenal Have Five Away Games After Champions League FixturesVijaya LakshmiNo ratings yet
- Scada Systems IntroductionDocument15 pagesScada Systems IntroductionVijaya LakshmiNo ratings yet
- Project PlanDocument2 pagesProject PlanVijaya LakshmiNo ratings yet
- Cavani Is Among The TargetsDocument3 pagesCavani Is Among The TargetsVijaya LakshmiNo ratings yet
- Security in Hybrid Cloud ComputingDocument1 pageSecurity in Hybrid Cloud ComputingVijaya LakshmiNo ratings yet
- Security in Hybrid Cloud ComputingDocument1 pageSecurity in Hybrid Cloud ComputingVijaya LakshmiNo ratings yet
- High Level DesignDocument7 pagesHigh Level DesignVijaya LakshmiNo ratings yet
- Bol Na Halke HalkeDocument2 pagesBol Na Halke HalkeVijaya LakshmiNo ratings yet
- En Eniya PonnilaveDocument150 pagesEn Eniya PonnilaveVijaya Lakshmi100% (1)
- Kanda Naall Mudhal Thamizh NivedhaDocument113 pagesKanda Naall Mudhal Thamizh NivedhaVijaya LakshmiNo ratings yet
- Is Pyaar Ko Kya Naam Doon 21st August 2012Document2 pagesIs Pyaar Ko Kya Naam Doon 21st August 2012Vijaya LakshmiNo ratings yet
- Light Commercial INVERTER Top Discharge CDU type Service ManualDocument99 pagesLight Commercial INVERTER Top Discharge CDU type Service ManualAbel Recinos100% (1)
- Burckhardt Plate Valve™: The Long Running Valve - Best in O ApplicationsDocument4 pagesBurckhardt Plate Valve™: The Long Running Valve - Best in O ApplicationsgemagdyNo ratings yet
- Sistema Hidraulico CAT 966FDocument24 pagesSistema Hidraulico CAT 966FJuan Dolla Jjau33% (3)
- MP334 Pumps Exam: Flow Rates, Head Loss & Pump SelectionDocument10 pagesMP334 Pumps Exam: Flow Rates, Head Loss & Pump Selectionm_abdelgawadNo ratings yet
- Model Xql14/6Yb Hydraulic Power Tong: Operation ManualDocument12 pagesModel Xql14/6Yb Hydraulic Power Tong: Operation ManualMartinez Mauricio Martinez GomezNo ratings yet
- Aircraft Part Numbers and Descriptions SpreadsheetDocument587 pagesAircraft Part Numbers and Descriptions SpreadsheetGregory KimNo ratings yet
- Squish and Swirl-Squish I+++++++++Document8 pagesSquish and Swirl-Squish I+++++++++Amal GargouriNo ratings yet
- survey-S60MC-C Derate NOx Group 7-v4-1 (5955)Document10 pagessurvey-S60MC-C Derate NOx Group 7-v4-1 (5955)SorinNo ratings yet
- D155ax-5 KomatsuDocument16 pagesD155ax-5 KomatsuLuís G. MorenoNo ratings yet
- Industrial Training ReportDocument57 pagesIndustrial Training ReportSOMI REDDY PALLI GURUPRASAD AUTO-2018 BATCHNo ratings yet
- BTRDocument100 pagesBTRBartłomiej Kilian100% (1)
- Airless SprayDocument31 pagesAirless SprayRicardoFranciscoMantillaGrajalesNo ratings yet
- Actuator Installation D1500 D1525Document3 pagesActuator Installation D1500 D1525orlando montielNo ratings yet
- API Bottom Loading Coupler J0451 - USADocument2 pagesAPI Bottom Loading Coupler J0451 - USAJavierfox98No ratings yet
- 15-3 Pistion & Connecting Rods PDFDocument9 pages15-3 Pistion & Connecting Rods PDFmefisto06cNo ratings yet
- Perancangan Mesin Pengering Vertikal Dengan Pengadukan Mekanik Untuk Biji-BijianDocument8 pagesPerancangan Mesin Pengering Vertikal Dengan Pengadukan Mekanik Untuk Biji-BijianPribadyoNo ratings yet
- Value Wise (More Then 2 Years)Document139 pagesValue Wise (More Then 2 Years)Saurabh Kumar SinghNo ratings yet
- MQ SP M 4026 PDFDocument31 pagesMQ SP M 4026 PDFjaseelNo ratings yet
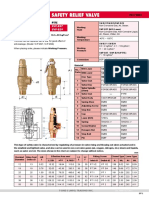
- Bronze Safety Relief Valve: SV-B27 SVP-B27 SV-B29 SVP-B29Document1 pageBronze Safety Relief Valve: SV-B27 SVP-B27 SV-B29 SVP-B29Shishan Ahmad100% (1)
- Specifications: Ackhoe OaderDocument4 pagesSpecifications: Ackhoe OaderJUNIOR OLIVO0% (1)
- MEK Marine Turbochargers Spare PartsDocument6 pagesMEK Marine Turbochargers Spare PartsMEK MarineNo ratings yet
- Spare Parts Catalog: 4 WG-200 Case Material Number: 4644.024.131Document78 pagesSpare Parts Catalog: 4 WG-200 Case Material Number: 4644.024.131Teknik MakinaNo ratings yet
- ESCAVADEIRA KOMATSU PC200-6 - Catálogo de PeçasDocument396 pagesESCAVADEIRA KOMATSU PC200-6 - Catálogo de PeçasJPJF100% (4)
- Honda Gx690 Workshop ManualDocument149 pagesHonda Gx690 Workshop ManualCosmin Ion Blaja100% (4)
- 190VXDocument554 pages190VXAnderson José Pereira100% (1)
- Motor Lincoln 286 TSCDocument5 pagesMotor Lincoln 286 TSCJose BarreroNo ratings yet
- GE Power Conversion Product Information PacketDocument5 pagesGE Power Conversion Product Information PacketCarlos Alberto Marroquin CordovaNo ratings yet
- SB8-2AN-e (Main Hoist Brake) RTGDocument11 pagesSB8-2AN-e (Main Hoist Brake) RTGMohamed ElnagdyNo ratings yet
- 03Ahd/Adw Selection Program Performance Summary: Tecam S.ADocument3 pages03Ahd/Adw Selection Program Performance Summary: Tecam S.ANey Raul Benji JoaquinNo ratings yet
- Case 435Document4 pagesCase 435Dian SikumbangNo ratings yet
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyFrom EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNo ratings yet
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Transmission Pipeline Calculations and Simulations ManualFrom EverandTransmission Pipeline Calculations and Simulations ManualRating: 4.5 out of 5 stars4.5/5 (10)
- Implementing an Integrated Management System (IMS): The strategic approachFrom EverandImplementing an Integrated Management System (IMS): The strategic approachRating: 5 out of 5 stars5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksFrom EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNo ratings yet
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- Air-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AFrom EverandAir-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&ARating: 5 out of 5 stars5/5 (1)