You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Weierwei Vev-3288 D Manual Price RangeDocument2 pagesWeierwei Vev-3288 D Manual Price RangeCybertronics Center100% (4)
- EmploymentDocument1 pageEmploymentkabirdeb5No ratings yet
- Important Formulas For Engineering EconomicsDocument13 pagesImportant Formulas For Engineering Economicskabirdeb5No ratings yet
- ISI NotesDocument1 pageISI Noteskabirdeb5No ratings yet
- Application For Freshers: Infosys LimitedDocument2 pagesApplication For Freshers: Infosys LimitedRoshan906No ratings yet
- UntitledDocument1 pageUntitledkabirdeb5No ratings yet
- IBPS PO4 CLK 4 RRB 3 CalenderDocument2 pagesIBPS PO4 CLK 4 RRB 3 CalenderSreejith Sundar PalavilaNo ratings yet
- List of PSUsDocument1 pageList of PSUskabirdeb5No ratings yet
- GRSEDocument3 pagesGRSEKartheek KonaNo ratings yet
- EmploymentDocument1 pageEmploymentkabirdeb5No ratings yet
- UntitledDocument4 pagesUntitledkabirdeb5No ratings yet
- EEE Final Upto 4th Year Syllabus 10.01.14Document62 pagesEEE Final Upto 4th Year Syllabus 10.01.14kabirdeb5No ratings yet
- UntitledDocument3 pagesUntitledkabirdeb5No ratings yet
- UntitledDocument4 pagesUntitledkabirdeb5No ratings yet
- UntitledDocument1 pageUntitledkabirdeb5No ratings yet
- UntitledDocument1 pageUntitledkabirdeb5No ratings yet
- UntitledDocument5 pagesUntitledkabirdeb5No ratings yet
- ICS435 - EN User ManualDocument60 pagesICS435 - EN User ManualRaul PetisNo ratings yet
- Breakdown Characteristics of Air GapsDocument9 pagesBreakdown Characteristics of Air GapsChamath KirindeNo ratings yet
- Report 1Document11 pagesReport 1abhitesNo ratings yet
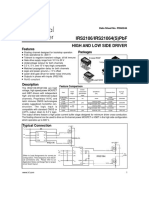
- IRS2106/IRS21064 high and low side driver datasheetDocument25 pagesIRS2106/IRS21064 high and low side driver datasheetmohamedNo ratings yet
- Solutions and interpretations of harmonic oscillator equationsDocument156 pagesSolutions and interpretations of harmonic oscillator equationsmcloughtNo ratings yet
- 385C Waw1-Up PDFDocument4 pages385C Waw1-Up PDFJUNA RUSANDI SNo ratings yet
- Lab 2 Universal Logic GatesDocument4 pagesLab 2 Universal Logic GatesIfthakharul Alam ShuvoNo ratings yet
- 4471 Mobile Device Security HandoutDocument32 pages4471 Mobile Device Security HandoutDamnGo0dNo ratings yet
- Soundware Xs Digital Cinema: Surround Sound Speaker SystemDocument12 pagesSoundware Xs Digital Cinema: Surround Sound Speaker Systemtlarocca1No ratings yet
- User Manual R11015 TLDocument80 pagesUser Manual R11015 TLJean Pierre Carranza CavaniNo ratings yet
- User's Manual: CNPS9700 / 9500A LEDDocument9 pagesUser's Manual: CNPS9700 / 9500A LEDNelson CantoNo ratings yet
- Thermal Methods of AnalysisDocument76 pagesThermal Methods of AnalysisAzuriak1100% (2)
- Analogue Report Common Emitter AmplifierDocument5 pagesAnalogue Report Common Emitter Amplifierfedley sikoliaNo ratings yet
- Velocity of Longitudinal WaveDocument12 pagesVelocity of Longitudinal WaverenzoNo ratings yet
- Kim Couthinho - Theon Couthinho - Neil Crasto - Frigen Dabre - Zelem DabreDocument19 pagesKim Couthinho - Theon Couthinho - Neil Crasto - Frigen Dabre - Zelem DabreSergiu MureșanNo ratings yet
- Noise PollutionDocument4 pagesNoise PollutionMF YousufNo ratings yet
- Sure Step Manuals PDocument70 pagesSure Step Manuals PjondeividNo ratings yet
- Avionics BasicsDocument47 pagesAvionics Basicschakri1729No ratings yet
- Differential AmplifierDocument5 pagesDifferential Amplifiermahesh babuNo ratings yet
- Handbook of Nanophase and Nano Structured Materials 4Document344 pagesHandbook of Nanophase and Nano Structured Materials 4mohayman100% (2)
- An Overview of Nonvolatile Emerging Memories - Spintronics For Working MemoriesDocument11 pagesAn Overview of Nonvolatile Emerging Memories - Spintronics For Working MemoriesAmritangshu RoyNo ratings yet
- RTKDocument18 pagesRTKSumit KumarNo ratings yet
- Dialight LED Catalog UL StreetSense-StreetLight Americas EnglishDocument2 pagesDialight LED Catalog UL StreetSense-StreetLight Americas EnglishDonalyn AdolfoNo ratings yet
- A536 Service ManualDocument32 pagesA536 Service ManualKissNo ratings yet
- TriBand Trisector - SSC-760220020 - 2.2m AntennaDocument7 pagesTriBand Trisector - SSC-760220020 - 2.2m AntennaborisNo ratings yet
- Hafizhul Ayyasi Khairullah English Journal on Voltage Flicker DetectionDocument4 pagesHafizhul Ayyasi Khairullah English Journal on Voltage Flicker DetectionYoshiro KitetsuNo ratings yet
- Interactive Rendering Using The Render Cache: AbstractDocument13 pagesInteractive Rendering Using The Render Cache: Abstractanjaiah_19945No ratings yet
- NE91 Project - VC4-ReportDocument8 pagesNE91 Project - VC4-ReportDipak ShahNo ratings yet
- CM-MSS.22 and CM-MSS.23: Thermistor Motor Protection RelaysDocument13 pagesCM-MSS.22 and CM-MSS.23: Thermistor Motor Protection RelaysBinh Thai HYNo ratings yet