You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Over Current & Earth Fault RelayDocument2 pagesOver Current & Earth Fault RelayDave Chaudhury67% (6)
- Nammiaca 000032Document5,323 pagesNammiaca 000032gangadhark196No ratings yet
- Into The Unknown 21 Doc PDFDocument9 pagesInto The Unknown 21 Doc PDFFernando AlbuquerqueNo ratings yet
- CDM816DSpare Parts Manual (Pilot Control) 2Document55 pagesCDM816DSpare Parts Manual (Pilot Control) 2Mohammadazmy Sobursyakur100% (1)
- Under Pass Wing Wall (4.1m)Document12 pagesUnder Pass Wing Wall (4.1m)Naveed NazNo ratings yet
- Article Unleashing The Power of Your StoryDocument17 pagesArticle Unleashing The Power of Your StoryAnkit ChhabraNo ratings yet
- Tech Manual 1396 Rev. B: 3.06/4.06" 15,000 Psi ES BOPDocument39 pagesTech Manual 1396 Rev. B: 3.06/4.06" 15,000 Psi ES BOPEl Mundo De Yosed100% (1)
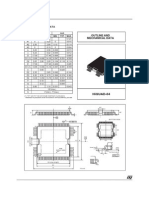
- Hiquad 64Document1 pageHiquad 64Dan EsentherNo ratings yet
- Powerso16: Outline and Mechanical DataDocument1 pagePowerso16: Outline and Mechanical DataDan EsentherNo ratings yet
- Pso 36Document1 pagePso 36Dan EsentherNo ratings yet
- PSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDocument1 pagePSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDan EsentherNo ratings yet
- Powersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDocument1 pagePowersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherNo ratings yet
- Powerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDocument1 pagePowerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDan EsentherNo ratings yet
- 10833Document18 pages10833Dan EsentherNo ratings yet
- Ppak Mechanical Data: Dim. Min. TYP MaxDocument1 pagePpak Mechanical Data: Dim. Min. TYP MaxDan EsentherNo ratings yet
- Powerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDocument1 pagePowerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDan EsentherNo ratings yet
- L9929Document3 pagesL9929Dan EsentherNo ratings yet
- 10832Document26 pages10832Dan EsentherNo ratings yet
- 9696Document17 pages9696Dan EsentherNo ratings yet
- Multipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDocument1 pageMultipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherNo ratings yet
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Document26 pagesFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherNo ratings yet
- Uh 30Document10 pagesUh 30Dan EsentherNo ratings yet
- VNQ830A-E: Quad Channel High Side DriverDocument17 pagesVNQ830A-E: Quad Channel High Side DriverDan EsentherNo ratings yet
- 10831Document21 pages10831Dan EsentherNo ratings yet
- 10683Document19 pages10683Dan EsentherNo ratings yet
- 10311Document23 pages10311Dan Esenther100% (1)
- 10830Document21 pages10830Dan EsentherNo ratings yet
- 10302Document4 pages10302Dan EsentherNo ratings yet
- 10022Document262 pages10022Dan EsentherNo ratings yet
- 10303Document5 pages10303Dan EsentherNo ratings yet
- VND830PEP-E: Double Channel High Side DriverDocument13 pagesVND830PEP-E: Double Channel High Side DriverDan EsentherNo ratings yet
- 10640Document22 pages10640Dan EsentherNo ratings yet
- 10261Document10 pages10261Dan EsentherNo ratings yet
- 9927Document11 pages9927Dan EsentherNo ratings yet
- 9934Document11 pages9934Dan EsentherNo ratings yet
- 9933Document11 pages9933Dan EsentherNo ratings yet
- 9792Document21 pages9792Dan EsentherNo ratings yet
- Case-Study - Decision Making Under UncertaintyDocument21 pagesCase-Study - Decision Making Under UncertaintyMari GhviniashviliNo ratings yet
- Subject: Digital System Design Faculty: Mr. P.Jayakrishna Unit-5 Assignment 5 Set 1Document2 pagesSubject: Digital System Design Faculty: Mr. P.Jayakrishna Unit-5 Assignment 5 Set 1Jayakrishna CharyNo ratings yet
- EY Enhanced Oil RecoveryDocument24 pagesEY Enhanced Oil RecoveryDario Pederiva100% (1)
- Asynchronous ChipsDocument27 pagesAsynchronous ChipsSai TejaNo ratings yet
- Homophones WorksheetDocument3 pagesHomophones WorksheetAmes100% (1)
- PECI 405 ECPP 7th Sem CivilDocument96 pagesPECI 405 ECPP 7th Sem CivilYasaswi AkkirajuNo ratings yet
- Modern Views Catalogue/Sotheby's BenefitDocument36 pagesModern Views Catalogue/Sotheby's BenefitStudio AdjayeNo ratings yet
- Bluforest, Inc. (OTC: BLUF) InvestigationDocument5 pagesBluforest, Inc. (OTC: BLUF) Investigationfraudinstitute100% (1)
- HBT vs. PHEMT vs. MESFET: What's Best and Why: Dimitris PavlidisDocument4 pagesHBT vs. PHEMT vs. MESFET: What's Best and Why: Dimitris Pavlidissagacious.ali2219No ratings yet
- Art and Geography: Patterns in The HimalayaDocument30 pagesArt and Geography: Patterns in The HimalayaBen WilliamsNo ratings yet
- Primary Three Exam Question.Document17 pagesPrimary Three Exam Question.ogidan preciousNo ratings yet
- Vertical Isolation VCBEnglishDocument1 pageVertical Isolation VCBEnglishdip461No ratings yet
- Design A Roller Coaster ProjectDocument4 pagesDesign A Roller Coaster Projectapi-3564628400% (1)
- NARS Fall 2011 Press File PDFDocument19 pagesNARS Fall 2011 Press File PDFheather_dillowNo ratings yet
- BTL Info CNC ProgrammDocument132 pagesBTL Info CNC ProgrammdieulafaitNo ratings yet
- FREEWAT Vol0 v.1.1.2Document159 pagesFREEWAT Vol0 v.1.1.2Jonathan QuirozNo ratings yet
- Tank Gauging TankvisionDocument31 pagesTank Gauging Tankvisionkhangduongda3No ratings yet
- Polynomial Transformations of Tschirnhaus, Bring and Jerrard4s++Document5 pagesPolynomial Transformations of Tschirnhaus, Bring and Jerrard4s++wlsvieiraNo ratings yet
- Digital Trail Camera: Instruction ManualDocument20 pagesDigital Trail Camera: Instruction Manualdavid churaNo ratings yet
- Manual Generador CAT C15 IbaguéDocument6 pagesManual Generador CAT C15 IbaguéAndres VargasNo ratings yet
- Cateora2ce IM Ch012Document9 pagesCateora2ce IM Ch012Priya ShiniNo ratings yet
- Celly BoostbkDocument15 pagesCelly BoostbknomikabNo ratings yet
- RA9275Document49 pagesRA9275znarf_ryanNo ratings yet