Professional Documents
Culture Documents
PSA Chapter 02 PDF
Uploaded by
Eleazar Sierra EspinozaOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
PSA Chapter 02 PDF
Uploaded by
Eleazar Sierra EspinozaCopyright:
Available Formats
DRAFT and INCOMPLETE
Table of Contents
from
A. P. Sakis Meliopoulos
Power System Modeling, Analysis and Control
Chapter 2 _____________________________________________________________ 2
Basic Power Systems Concepts ____________________________________________ 2
2.1 Introduction ____________________________________________________________ 2
2.2 Phasors and Power Concepts ______________________________________________ 2
2.3 Network Analysis - Basic Concepts _________________________________________ 9
2.4 Conservation of Complex Power __________________________________________ 12
2.5 Three Phase Power Systems ______________________________________________ 13
2.6 Symmetrical Components ________________________________________________ 17
2.7 Balanced Operation _____________________________________________________ 20
2.8 Delta-Wye Transformations ______________________________________________ 25
2.9 Introduction to the Power Transmission Problem ____________________________ 33
2.10 Non-sinusoidal Operation _______________________________________________ 39
2.11 Summary ____________________________________________________________ 41
2.12 Problems ____________________________________________________________ 42
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.2 Copyright A. P. Sakis Meliopoulos 1990-2013
Chapter 2
Basic Power Systems Concepts
2.1 Introduction
In this chapter we discuss a number of basic power system concepts which appear in
almost all power system analysis problems. We focus on the steady state operation of
power systems. Most of the time, an electric power system operates under sinusoidal
steady state conditions, i.e. the voltages and currents anywhere in the system are
considered to be near perfect sinusoids. We refer to this operating condition as Sinusoidal
Steady State Condition (SSSC). This assumption and the resulting analysis methods are
appropriate to describe the operation of the system for a rather large number of
applications, such as power flow analysis, short circuit analysis, transient stability, etc. It
is also possible that certain components of the system may distort the sinusoidal
waveform. Power electronic based devices connected to the power system may result in
deviations from the pure sinusoidal steady state operation. The voltage and electric
current waveforms may be periodic but they are not pure sinusoidal. We refer to this
operating condition as Periodic Steady State Condition (PSSC). The basic concepts
discussed in this chapter are applicable for the analysis of power systems under
sinusoidal steady state conditions. For completeness, a short discussion of the periodic
steady state conditions is also provided.
2.2 Phasors and Power Concepts
Many power system analysis problems are based on the following assumptions:
(a) the power system operates under steady state conditions
(b) the power system excitation is a pure sinusoid
(c) the power system comprises only linear elements
Accepting above assumptions, the electric current and voltage anywhere in the system
will be a pure sinusoid written in the form:
( ) e + = t I t i
m
cos ) (
( ) u e + = t V t v
m
cos ) (
where I
m
is the maximum value of the electric current
V
m
is the maximum value of the voltage
e is the angular frequency
is the phase of the electric current
u is the phase of the voltage
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.3
A number of interesting properties apply to this condition. First let's examine the root
mean square (rms) value of the electric current and voltage:
2
) ( cos
1
) (
1
0
2 2
0
2 m
T
m
T
rms
V
dt t V
T
dt t v
T
V = + = =
} }
e
Similarly,
2
m
rms
I
I =
Above relations tell us that under SSSC, the root mean square value of the electric current
or voltage is equal to the maximum value divided by the square root of 2. Thus we can
write:
( ) e + = t I t i
rms
cos 2 ) (
( ) u e + = t V t v
rms
cos 2 ) (
Another interesting property can be obtained by writing the above equations in the
following equivalent form:
( )
) (
2 Re ) (
e +
=
t j
rms
e I t i
( )
) (
2 Re ) (
u e +
=
t j
rms
e V t v
Where ( ) Re is the real part of the argument. The above relationships are identities,
which can be shown by recalling Euler's identity:
o o
o
sin cos j e
j
+
The above relationships can also be written as:
( )
t j j
rms
e e I t i
e
2 Re ) ( =
( )
t j j
rms
e e V t v
e u
2 Re ) ( =
Note that the quantities I
rms
e
j
and V
rms
e
ju
are complex quantities. Let's define
j
rms
e I I
~
u j
rms
e V V
~
Then,
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.4 Copyright A. P. Sakis Meliopoulos 1990-2013
( )
t j
e I t i
e
~
2 Re ) ( =
( )
t j
e V t v
e
~
2 Re ) ( = (2.1)
Let's examine a useful geometric interpretation of above equation. Consider Figure 2.1.
The complex quantity
t j
e I
e
~
2 is a vector in the complex plane. Note that the angle of
this vector with respect to the real axis is et+, i.e. it is time varying. The projection of
this vector on the real axis is the instantaneous value of the electric current. As time
progresses, the vector
t j
e I
e
~
2 rotates with angular speed equal to e. Its projection on
the real axis is always i(t). As a result one needs to know only I
~
to reconstruct i(t). The
quantity I
~
is called the phasor of the electric current. Based on this definition, it would
be more precise to call it the root mean square phasor of the electric current. For
simplicity we refer to I
~
as the phasor current or the complex current. A similar
construction and discussion applies to
t j
e V
e
~
2 . It is customary to drop the factor 2 and
to plot the complex current or complex voltage on the complex plane at time t=0. This
construction results to what is called the phasor diagram. The phasor diagram for the
current and voltage of Figure 2.1 is illustrated in Figure 2.2.
e t
|
i(t) Real Axis
I
m
a
g
i
n
a
r
y
A
x
i
s
u
t j
e I
e
~
2
t j
e V
e
~
2
Figure 2.1 Geometric Interpretation of Equation (2.1)
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.5
u
|
Real Axis
I
m
a
g
i
n
a
r
y
A
x
i
s
V
~
I
~
Figure 2.2 Phasor Representation of Equation (2.1)
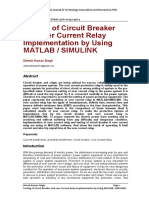
Now, consider a one-port two-terminal device, illustrated in Figure 2.3a. The voltage and
electric current at the port of the device are v(t) and i(t) respectively. The instantaneous
power flowing into the device is:
) 2 cos( ) cos(
) cos( ) cos( 2
) ( ) ( ) (
u e u
e u e
+ + + =
+ + =
=
t I V I V
t t I V
t i t v t p
rms rms rms rms
rms rms
Note that the power consists of two terms: one which is independent of time and another
term which is a sinusoidal function of time. The average power flowing into the device is
) cos( ) (
1
0
u = =
}
rms rms
T
I V dt t p
T
P
Note that the average power equals the product of the RMS voltage and current, times the
cosine of the angle u - . The last term is referred to as the power factor:
power factor cos( u - )
The instantaneous power consists of a constant term and a sinusoidal term which has an
angular frequency double of that of the voltage or electric current. This power is
pulsating, i.e. flows in and out of the device with zero net flow. This power has been
coined the reactive power many decades ago. In 1932, Fryze provided a theory which
simplified the representation of reactive power. Specifically, Fryze postulated that the
apparent power, S
a
, of the device is simply the product of its voltage times the current:
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.6 Copyright A. P. Sakis Meliopoulos 1990-2013
rms rms a
I V S =
Then he postulated that the reactive power Q is related to S and P as follows:
( )
) ( sin
) ( cos 1
2 2 2
2 2 2
2 2 2
u
u
=
=
=
rms rms
rms rms
a
I V
I V
P S Q
or
) sin( u =
rms rms
I V Q
It is customary to select only the plus sign resulting in the following definition of reactive
power.
) sin( u =
rms rms
I V Q
This theory, in essence, postulates that the real and reactive power are projections of the
apparent power on the real and imaginary axes of the complex plane. Algebraically, this
can be stated as follows:
jQ P
jS S
I jV I V
e I V
I V S
a a
rms rms rms rms
j
rms rms
rms rms
+ =
+ =
+ =
=
=
) sin( ) cos(
) sin( ) cos(
~ ~
) (
*
u u
u u
u
Above relationship involves four quantities, S, S
a
, P, and Q. All of them express power
but they are all different physical quantities. To distinguish them, the following
nomenclature has been adopted many years ago and it is used in power engineering:
Quantity Name Units
S Complex Power VA (Volt Ampere)
S
a
Apparent Power VA (Volt Ampere)
P Real Power W (Watt)
Q Reactive Power VAr (Volt Ampere, reactive)
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.7
v(t)
+
-
i(t)
Single
Port
Device
(a)
(b)
Figure 2.3 Electric Power into a Single Port Device
(a) Single Port Circuit, (b) Input Voltage, Current and Power
Program XfmHms - Page 1 of 1
c:\books\md_psa\examples\psa-ch10-ex10-2c - Aug 31, 2002, 18:09:04.000000 - 30000.0 samples/sec - 3000 Samples
4.040 4.050 4.060 4.070 4.080
-100.0 k
-60.00 k
-20.00 k
20.00 k
60.00 k
100.0 k
Voltage (V)
-100.0
-60.00
-20.00
20.00
60.00
100.0
Current (A)
-2.000 M
0.000
2.000 M
4.000 M
6.000 M
8.000 M
Power (W)
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.8 Copyright A. P. Sakis Meliopoulos 1990-2013
Now lets examine the term ) sin( u =
a
S Q . If the phase of the electric current, , is
less than u, then 0 ) sin( > u and Q > 0. In this case we say that the electric current
lags the voltage because if the voltage and electric current phasors are depicted on the
same complex plane as it is illustrated in Figure 2.4, the voltage phasor appears to be
'ahead' of the electric current phasor. On the other hand, if u < , then Q < 0. Again, by
observing the voltage and current phasors we conclude that in this case, the current
phasor leads the voltage phasor. In power engineering it is customary to specify the
power by stating the apparent power and the power factor, i.e. the value of the term
) cos( u , which appears in the real power expression. Since ) cos( ) cos( u u = ,
the power factor alone can not determine whether u > or u < . Additional information
must be given. Most of the time we are given the value of ) cos( u (power factor) and
whether the electric current is lagging or leading the voltage. For example, power factor
0.8 lagging means that 8 . 0 ) cos( = u and the electric current phasor lags the voltage
phasor, i.e. u > .
u|
u|
Q
P
S = V I
~ ~*
Real Axis
I
m
a
g
i
n
a
r
y
A
x
i
s
V
o
l
t
s
,
A
m
p
s
,
o
r
V
a
r
s
Volts, Amps, or Watts
Positive
Direction
of Rotation
V
~
I
~
I
~*
Figure 2.4. Phasor Representation of Voltage, Electric Current, Real Power, and
Reactive Power
Example E2.1: Consider the single phase transmission line of Figure E2.1. The electric
current and voltage at one terminal of a single phase transmission line are:
A t I
o
), 10 cos( 141
~
= e
V t V
o
), 5 cos( 390
~
+ = e
Compute the rms values of the electric current and voltage, the rms phasors of the electric
current and voltage, the apparent power, the complex power, and the real and reactive
power flowing into the line.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.9
V
~
I
~
Single Phase
Transmission Line
Figure E2.1: Illustration of a Single Phase Line
Solution: The computed values are:
VAr Q
W P
j I V S
VA S
V e V
A e I
V V
A I
rms rms
a
j
rms
j
rms
rms
rms
117 , 7
560 , 26
117 , 7 560 , 26
~ ~
498 , 27
8 . 275
~
7 . 99
~
8 . 275
7 . 99
*
5
10
0
0
=
=
+ = =
=
=
=
=
=
2.3 Network Analysis - Basic Concepts
An electric power system consists of the interconnection of many devices. For many
analysis purposes, each device is converted into an equivalent circuit. In this way the
entire power system is converted into the interconnection of the equivalent circuits of all
devices, i.e. an equivalent network. The analysis of this network can be performed with
one of two methods: (a) Loop Analysis, and (b) Nodal Analysis. In this book we prefer to
analyze networks using the nodal method. There is a good reason for this preference:
Recent advances in computer analysis methods indicate that nodal analysis is superior to
other methods from the computational efficiency point of view. Specifically, nodal
analysis requires the manipulation of the admittance matrix while loop analysis requires
the manipulation of the impedance matrix of a system. For electric power systems, the
admittance matrix is sparse while the impedance matrix is full. Advances in sparsity
techniques (see Appendix A) have made the manipulations of the admittance matrix
much more efficient than those of the impedance matrix. The efficiency gains, for large
scale systems such as electric power networks, are dramatic and therefore present
methods of power system analysis are nodal analysis based. A brief description of the
nodal analysis method follows.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.10 Copyright A. P. Sakis Meliopoulos 1990-2013
Consider a node i of the network and the elements connected to node i, as illustrated in
Figure 2.5. For device k
1
, the electric current at the terminal connected to node i is a
linear combination of the voltages at the terminals of device k
1
, i.e.
=
j
j ij
k
i
V y i
1
(2.2)
Device k
1
Node i
To
Device
k
3
To
Device
k
2
3
k
i
i
2
k
i
i
1
k
i
i
Figure 2.5. Illustration of a Node i and Devices k
1
, k
2
, and k
3
Connected to Node i
At node i, the sum of all currents should be zero by Kirchoff's current law. For the
example illustrated in Figure 2.5:
0
3 2 1
= + +
k
i
k
i
k
i
i i i (2.3)
Since each electric current in equation 2.3 can be expressed as a linear combination of the
terminal voltages (as in equation 2.2), substitution of the electric currents will result in a
linear equation in terms of node voltages (i.e. the only unknowns are the node voltages).
Observe that one such equation can be written for each node in the system. Each one of
these equations contains, as unknowns, a subset of the nodal voltages. For a system with
N nodes, N such equations are written in terms of the N unknown node voltages. The
result is a consistent system of N equations in N unknowns. Solution of these equations
will yield the node voltages. Subsequently, substitution of the node voltages into
equation (2.2) will yield the electric current at any terminal of a device. The procedure is
illustrated with an example.
Example E2.2: Consider the system of Figure E2.2. A generator connected to node 1
injects an electric current of 100 Amperes. Compute the complex power absorbed by the
load at bus 3 and the complex power delivered by the generator.
Solution: The nodal equations (three nodes) are:
I I I
~ ~ ~
13 12
= +
0
~ ~
23 21
= + I I
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.11
0
~ ~ ~
3 32 31
= + + I I I
where
)
~ ~
( 2 . 0
~
2 1 12
V V j I =
)
~ ~
( 2 . 0
~
2 1 21
V V j I =
)
~ ~
( 1 . 0
~
3 1 13
V V j I =
)
~ ~
( 1 . 0
~
3 1 31
V V j I =
)
~ ~
( 1 . 0
~
3 2 23
V V j I =
)
~ ~
( 1 . 0
~
3 2 32
V V j I =
3 3
~
001 . 0
~
V I =
Upon substitution of the electric currents in terms of the voltages, the following equations
result.
(
(
(
=
(
(
(
(
(
(
0
0
100
~
~
~
2 . 0 001 . 0 1 . 0 1 . 0
1 . 0 3 . 0 2 . 0
1 . 0 2 . 0 3 . 0
3
2
1
V
V
V
j j j
j j j
j j j
1 2
3
-j0.2S
12
~
I
21
~
I
13
~
I
31
~
I
23
~
I
32
~
I
Load
3
~
I
A I 100
~
=
-j0.1S -j0.1S
0.001S
Figure E2.2 Example Power Circuit
Solution of these equations yields:
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.12 Copyright A. P. Sakis Meliopoulos 1990-2013
V j V 600 000 , 100
~
1
+ =
V j V 400 000 , 100
~
2
+ =
V V 000 , 100
~
3
=
The complex power absorbed by the load at bus 3 is:
VA V V I V S 000 , 000 , 10
~ ~
001 . 0
~ ~
*
3 3
*
3 3 3
= = =
W P 000 , 000 , 10
3
=
0
3
= Q
The complex power delivered by the generator is
VA j I V S 60000 000 , 000 , 10
~ ~
*
1 1 1
+ = =
W P 000 , 000 , 10
1
=
VAr Q 60000
1
=
2.4 Conservation of Complex Power
Another concept, which is a consequence of Kirchoffs current law, is the concept of
conservation of complex power at a node. Consider a network node i, and apply
Kirchoffs current law at this node:
0
) (
=
e i K k
k
i
j
j
i
where
j
k
i
i is the electric current flowing into node i of device k
j
. K(i) is the set of devices
connected to node I of the network. Assuming sinusoidal steady state conditions, the
above equation is converted to:
0
~
) (
=
e i K k
k
i
j
j
I
The above equation is first conjugated and then multiplied by the voltage phasor at node
i, yielding:
( ) 0
~ ~
*
) (
=
e i K k
k
i i
j
j
I V
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.13
Note that ( )
j
k
i i
I V
~ ~
is the complex power
j
k
S flowing into circuit (or device) k
j
at node i ,
noting that device k
j
is connected to node i. Thus
0
) (
=
e i K k
k
j
j
S
The above equation states that the sum of all complex power values flowing into a node,
from all circuits connected to this node, is zero. We will refer to this general principle as
the conservation of complex power.
Example E2.3: A single phase generator supplies two electric loads of 5 MW+j2 MVAr
and 2.3 MW+j1.2 MVAr respectively, as shown in Figure E2.3. The voltage at the
terminals of the generator is 7.2 kV. Compute the electric current supplied by the
generator.
5 MW + j2MVAr
2.3MW + j1.2MVAr
I
~
V
~
Figure E2.3 A Generator Supplying Two Electric Loads
Solution: Applying the principle of conservation of complex power at the indicated node
and observing that the complex power of the generator is
*
~ ~
I V :
MVAr j MW I V 2 . 3 3 . 7
~ ~
*
+ =
kA e kA j I
j
0
67 . 23 *
107 . 1 4444 . 0 0139 . 1
~
= + =
Thus, kA e I
j
0
67 . 23
107 . 1
~
=
2.5 Three Phase Power Systems
The idea of a three phase system came about by trying to maximize the amount of power
that can be transferred or generated with respect to materials used. The majority of
power systems comprise three phase arrangements which consist of the interconnection
of three phase generators, three phase lines, three phase transformers, and other
supporting equipment.
Any three phase element has three phases and possibly a neutral (sometimes a fifth wire
may be present, a safety ground). This is illustrated in Figure 2.6. A number of
definitions pertinent to three phase systems will be introduced next.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.14 Copyright A. P. Sakis Meliopoulos 1990-2013
Three
Phase
Device
A
B
C
N
Ground
A
I
~
B
I
~
C
I
~
N
I
~
AN
V
~
BN
V
~
CN
V
~
Figure 2.6. A General Three Phase Element
In general, a three phase system may be constructed as a single integrated device with
three phases on a common construction, for example, a three phase generator, a three
phase transformer, etc. or it may be constructed with three single phase elements
connected in a three-phase arrangement. Examples are electric loads, transformers, and
motors. The three phases may be connected in a delta or a wye configuration or any
combination of these two. The delta and wye connections are illustrated in Figure 2.7.
For the description of three-phase systems, the following definitions are introduced:
A
B
C
A
B
C
N
(a) (b)
Figure 2.7 Three Elements Forming a Three-Phase System
(a) Delta Connection, (b) Wye Connection
Balanced Set of Three-Phase Voltages. A set of three-phase voltages, v
a
(t), v
b
(t), v
c
(t),
is called balanced if and only if:
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.15
The voltages vary sinusoidally with time.
The amplitudes of the voltages are equal.
There is a 120
o
phase difference between any two.
As an example, the following set of three-phase voltages is balanced:
) cos( 2 ) ( u e + = t V t v
a
(2.4a)
) 120 cos( 2 ) ( u e + =
o
b
t V t v (2.4b)
) 240 cos( 2 ) ( u e + =
o
c
t V t v (2.4c)
In equations (2.4), the phase difference between the phase A and the phase B is +120
o
.
This phase relationship among the three phases will be called the positive phase
sequence. A three-phase generator generates a set of three-phase voltages that are nearly
balanced and of the positive phase sequence. It is expedient to introduce the concept of
an ideal three-phase source, which is illustrated in Figure 2.8.
e
ab
(t) e
bc
(t)
e
ca
(t)
B
A C
a
V
~
b
V
~
c
V
~
e
b
(t) e
c
(t)
e
a
(t)
B
A
C
a
V
~
b
V
~
c
V
~
N
(a) (b)
Figure 2.8 Ideal Three-Phase Voltage Source
(a) Delta Connected, (b) Wye Connected
An ideal three-phase source generates a set of balanced three-phase voltages. Most three-
phase sources generate a balanced set of voltages of the positive phase sequence. (Note
that it is possible to define other phase sequences, such as the negative and the zero
sequence. These are introduced in a subsequent section). It is apparent that a set of
balanced three-phase voltages is uniquely determined by the voltage magnitude V, the
angular frequency e, the phase angle |, and the phase sequence. Alternatively, it can be
uniquely defined by the phasor of the phase A voltage,
u j
a
Ve V =
~
, and the phase
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.16 Copyright A. P. Sakis Meliopoulos 1990-2013
sequence. Throughout the text, when the phase sequence is not specified, it will be
assumed to be the positive sequence.
Balanced Set of Three-Phase Currents. The definition of a balanced set of 3-phase
currents is similar to the one for the voltage, stated above. Specifically, a set of three-
phase currents, i
a
(t), i
b
(t), i
c
(t), is called balanced if and only if:
The currents vary sinusoidally with time.
The amplitudes of the electric currents are equal.
There is a 120
o
phase difference between any two.
As an example, the following set is balanced:
) cos( 2 ) ( e + = t I t
a
i (2.5a)
) 120 cos( 2 ) ( e + =
o
t I t
b
i (2.5b)
) 240 cos( 2 ) ( e + =
o
t I t
c
i (2.5c)
The set above, as in the case of voltages, is called a balanced set of three phase electric
currents of positive phase sequence.
A related definition is introduced for a three-phase system, next.
Symmetric Three-Phase System. A three-phase passive system is called symmetric if
and only if the following two statements are true:
It is a linear system.
A balanced set of three-phase currents flows into the system when it is excited
with a balanced set of three-phase voltages.
The definition of a symmetric three-phase system is illustrated in Figure 2.9. Practical
three-phase systems comprise three-phase components that are symmetric or nearly
symmetric. Three-phase transformers are symmetric three-phase devices, three-phase
synchronous generators are nearly symmetric devices, overhead transmission lines are
nearly symmetric, and so on. Traditional power system analysis techniques (i.e. load
flow, fault analysis, transient stability techniques, etc.) have been developed based on the
assumption of symmetric three-phase systems.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.17
i
a
(t)
i
b
(t)
i
c
(t) v
c
(t)
v
a
(t)
v
b
(t)
Passive
Linear
3-Phase
System
Ideal
3-Phase
Source
|
|
.
|
\
|
|
|
.
|
\
|
) ( ), ( ), ( ) ( ), ( ), ( t i t i t i
rrents BalancedCu
t V t V t V
ltages BalancedVo
c b a c b a
Figure 2.9. Definition of a Symmetric Three-Phase System
Most practical three phase power system elements are not symmetric; but they are near
symmetric. By this we mean that by modeling a specific power element as symmetric,
we commit a small error. In most applications, i.e. power flow, stability analysis, etc.,
this error is acceptable.
2.6 Symmetrical Components
Most of the time, the majority of a three phase power system operates under balanced
conditions. Whenever the balanced operation is disturbed, the analysis of the system can
be performed in two ways:
(a) By analysis of the entire three phase system.
(b) By decomposing the system into three balanced and symmetric systems and then
analyzing each system individually.
The second method is known as the method of symmetrical components. It is introduced
next:
Consider a set of three phase voltages and electric currents (
c b a
V V V
~
,
~
,
~
), and (
c b a
I I I
~
,
~
,
~
),
respectively. These sets are transformed via a transformation T into another set of
voltages and electric currents (
0 2 1
~
,
~
,
~
V V V ), and (
0 2 1
~
,
~
,
~
I I I ) respectively.
The transformation is defined as follows:
120
1
~ ~
V T V
abc
=
120
1
~ ~
I T I
abc
=
where
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.18 Copyright A. P. Sakis Meliopoulos 1990-2013
,
1 1 1
1
1
3
1
2
2
(
(
(
= a a
a a
T
0
120 j
e a = ,
(
(
(
1
1
1 1 1
2
2 1
a a
a a T
(
(
(
=
c
b
a
abc
V
V
V
V
~
~
~
~
(
(
(
=
0
2
1
120
~
~
~
~
V
V
V
V
(
(
(
=
c
b
a
abc
I
I
I
I
~
~
~
~
(
(
(
=
0
2
1
120
~
~
~
~
I
I
I
I
The importance of this transformation relies on the fact that it can transform the equations
of a three phase device (generally a set of coupled equations), into three uncoupled
equations. This property of the transformation will be illustrated by an example.
Example E2.4: Consider a simple model of a three phase generator. The generator
consists of three inductors (one for each phase A, B, and C) and the 3 phase voltage
sources, E
a
, E
b
, and E
c
. Each inductor has a self inductance L
s
and mutual inductance
with the other two equal to L
m
, as illustrated in Figure E2.4a. Express the terminal
voltages in terms of the electric currents and source voltages and then transform these
equations using the symmetrical transformation. Then compute the complex power
delivered by the generator in terms of the symmetrical components.
b
a
c
n
a
E
~
b
E
~
c
E
~
L
s
L
m
L
s
L
s
L
m
L
m
a
I
~
b
I
~
c
I
~
Figure E2.4a A Simplified Three Phase Source
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.19
Solution: The voltages at the generator terminals are:
a c b m a s an
E I I L j I L j V
~
)
~ ~
(
~ ~
+ + + = e e
b c a m b s bn
E I I L j I L j V
~
)
~ ~
(
~ ~
+ + + = e e
c b a m c s cn
E I I L j I L j V
~
)
~ ~
(
~ ~
+ + + = e e
In compact matrix notation, the above equations are written as follows:
abc abc abc
E ZI V + =
The vectors of voltages, currents and the matrix Z are defined by the equivalence of the
matrix equation to the original set of equations.
Note that above equations are coupled, i.e. each terminal voltage is a function of all three
phase currents. Now let's apply the symmetrical transformation as follows:
120
1
~ ~
V T V
abc
=
120
1
~ ~
I T I
abc
=
120
1
~ ~
E T E
abc
=
Substitution into the matrix equation yields:
120
1
120
1
120
1
~ ~ ~
E T I ZT V T
+ =
Upon pre-multiplication of above equation by the matrix T:
120 120
1
120
~ ~ ~
E I TZT V + =
It can bee shown by direct evaluation that the product of the three matrices TZT
-1
is a
diagonal matrix. Thus, expanding the above matrix equation we obtain:
1 1 1
~ ~
) (
~
E I L L j V
m s
+ = e
2 2 2
~ ~
) (
~
E I L L j V
m s
+ = e
0 0 0
~ ~
) 2 (
~
E I L L j V
m s
+ + = e
Note that above equations are decoupled, i.e. the voltage and current variables of each
equation do not appear in the other two. These equations can be represented by the three
independent circuits illustrated in Figure E2.4b. It should be also noted that if the 3 phase
source is balanced, then 0
~ ~
0 2
= = E E . The three networks of Figure E2.4b are referred to
as the positive sequence equivalent circuit, the negative sequence equivalent circuit and
the zero sequence equivalent circuit, respectively.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.20 Copyright A. P. Sakis Meliopoulos 1990-2013
The complex power delivered by the generator is (the negative sign is due to the fact that
the electric current is in the direction into the generator).
( ) ( )
( ) ( ) ( )
*
0 0
*
2 2
*
1 1
*
120
1
120
1 -
* T
abc
* * *
~ ~
3
~ ~
3
~
V
~
3
~
V
~
T - =
~
V
~ ~ ~ ~ ~ ~ ~
I V I V I I T
I I V I V I V S
T
abc c cn b bn a an
+ + =
= + + =
2
~
E
L
s
-L
m
2
~
I
2
~
V
1
~
E
L
s
-L
m
1
~
I
1
~
V
0
~
E
L
s
+2L
m
0
~
I
0
~
V
Figure E2.4b The Sequence Networks of the Simplified Three Phase Source of
Figure E2.4a
2.7 Balanced Operation
The balanced operation of an electric power system is characterized by the fact that, at
every location of the system, the three phase voltages and currents are balanced. A three
phase electric power system is in balanced operation whenever the following two
conditions are met: (a) the excitation of the system is balanced (balanced three phase
sources), and (b) all system components are symmetric three phase components. In
practical power systems these two conditions are not met. However, most systems come
very close to meeting these conditions. For this reason, most analysis methods are based
on the assumption of balanced operation, i.e. (a) all sources are balanced and (b) all
power system components are symmetric.
The analysis of a balanced three phase system can be drastically simplified by observing
that the voltage and electric current at the three phases are equal in magnitude and the
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.21
phase angle between any two is 120
o
. Consider for example Figure 2.10. Observe that, if
balanced operation is assumed, the electric current in the neutral is equal to zero and the
voltage at any point along the neutral is zero. Therefore all points on the neutral can be
represented with only one electric node. This fact isolates the three phases. The
representation of phase A is illustrated in Figure 2.11. It is apparent now that the phase A
branch can be analyzed by considering Figure 2.11 only. Once the voltages and currents
of the circuit of Figure 2.11 have been determined, the voltages and currents at the
remaining phases (B and C) can be obtained by adding a phase angle of -120
o
and -240
o
to the phase A voltage and current phasor arguments. The circuit of Figure 2.11 is called
the per phaseequivalent circuit.
b
E
~
Z
L
a
E
~
c
E
~
Z
n
Z
p
Z
p
Z
p
Z
L
Z
L
Figure 2.10. A Symmetric Three Phase System in Balanced Operation
a
E
~
Z
p
Z
L
Figure 2.11. Equivalent Circuit of Phase A of System of Figure 2.10
It is important to note that the per phase equivalent circuit can be derived in a rigorous
mathematical way using symmetrical components. For this purpose consider again the
system of Figure 2.10. The circuit equations describing this system are:
)
~ ~ ~
(
~ ~ ~
c b a n a L a p a
I I I Z I Z I Z E + + + + =
)
~ ~ ~
(
~ ~ ~
c b a n b L b p b
I I I Z I Z I Z E + + + + =
)
~ ~ ~
(
~ ~ ~
c b a n c L c p c
I I I Z I Z I Z E + + + + =
In compact matrix notation:
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.22 Copyright A. P. Sakis Meliopoulos 1990-2013
abc abc
I Z E
~ ~
=
where
(
(
(
+ +
+ +
+ +
=
n L p n n
n n L p n
n n n L p
Z Z Z Z Z
Z Z Z Z Z
Z Z Z Z Z
Z
Application of the symmetrical component transformation yields:
120
1
120
~ ~
I T TZ E
=
Note that
(
(
(
+ +
+
+
=
n L p
L p
L p
Z Z Z
Z Z
Z Z
TZT
3 0 0
0 0
0 0
1
By writing explicitly above equations:
1 1 1
~ ~ ~
I Z I Z E
L p
+ =
2 2 2
~ ~ ~
I Z I Z E
L p
+ =
0 0 0 0
~
3
~ ~ ~
I Z I Z I Z E
n L p
+ + =
On the other hand:
(
(
(
= =
0
0
~
~ ~
120
a
abc
E
E T E
(
(
(
= =
0
0
~
~ ~
120
a
abc
I
I T I
Thus above equations become:
1 1 1
~ ~ ~
I Z I Z E
L p
+ =
2 2
~ ~
0 I Z I Z
L p
+ =
0 0 0
~
3
~ ~
0 I Z I Z I Z
n L p
+ + =
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.23
Note that the first equation corresponds to the per phase equivalent circuit of the system
of Figure 2.10. The second and third equations yield the trivial results 0
~
2
= I and
0
~
0
= I respectively.
In the previous analysis, the per phase equivalent circuit is overly simplistic. Lets
consider a more complicated but also more realistic case. Again considering the system
of Figure 2.12a, the line has mutual impedance between any two phases, Z
m
and between
any phase and the neutral, Z
mn
. In this case, the model equations of this system are:
( ) ( ) ( ) ( )
c b a mn c b a n a L c b a mn c b m a s a
I I I Z I I I Z I Z I I I Z I I Z I Z E + + + + + + + + + + =
~
( ) ( ) ( ) ( )
c b a mn c b a n b L c b a mn c a m b s b
I I I Z I I I Z I Z I I I Z I I Z I Z E + + + + + + + + + + =
~
( ) ( ) ( ) ( )
c b a mn c b a n c L c b a mn a b m c s c
I I I Z I I I Z I Z I I I Z I I Z I Z E + + + + + + + + + + =
~
Z
L
Z
n
Z
s
Z
L
Z
L
Z
mn Z
mn
Z
mn
Z
m
Z
m
Z
m
Z
s
Z
s
b
E
~
a
E
~
c
E
~
Figure 2.12a A Symmetric Three Phase System in Balanced Operation
Circuit Diagram of the System
In compact matrix notation
abc abc
I Z E
~ ~
=
where
(
(
(
+ + + +
+ + + +
+ + + +
=
mn n L s n mn m n mn m
n mn m mn n L s n mn m
n mn m n mn m mn n L s
Z Z Z Z Z Z Z Z Z Z
Z Z Z Z Z Z Z Z Z Z
Z Z Z Z Z Z Z Z Z Z
Z
2 2 2
2 2 2
2 2 2
Application of the symmetrical components transformation yields.
120
1
120
~ ~
I TZT E
=
Note that
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.24 Copyright A. P. Sakis Meliopoulos 1990-2013
(
(
(
+ + +
+
+
=
mn n m L s
m L s
m L s
Z Z Z Z Z
Z Z Z
Z Z Z
TZT
6 3 2 0 0
0 0
0 0
1
1
~
E
Z
s
- Z
m
Z
L
1
~
I
Z
s
- Z
m
Z
L
2
~
I
Z
s
+ 2Z
m
+ 3Z
n
- 6Z
mn
Z
L
0
~
I
Figure 2.12b A Symmetric Three Phase System in Balanced Operation.
Positive, Negative and Zero Sequence Networks
Again, the above equations yield:
0
2
1 1
~
) 6 3 2 ( = 0
~
) ( = 0
~
) (
~
I Z Z Z Z Z
I Z Z Z
I Z Z Z E
mn n L m s
m L s
m L s
+ + +
+
+ =
The above equations are represented by the equivalent circuits of Figure 2.12b.
Note that
a
a
I I
E E
~ ~
~ ~
1
1
=
=
0
~
2
= I , and
0
~
0
= I
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.25
In this case, the positive sequence network of Figure 2.12b is the phase A equivalent
circuit of the system.
The above example reveals that whenever the three phase system consists of wye
connected elements, the per phase equivalent circuit can be determined, in most cases, by
inspection. However, many power system elements are delta connected. In this case, a
transformation of the delta-connected element into a wye-connected equivalent element
simplifies the problem. The transformation is performed on the basis of identical
voltage-current relationships. The next section introduces these transformations.
2.8 Delta-Wye Transformations
In this section we examine transformations of delta-connected power apparatus into
equivalent wye-connected power apparatus and vice-versa. The two elements are
equivalent in the sense that they obey the same terminal voltage-current equations.
Consider a delta connected voltage source. The general form of this component is
illustrated in Figure 2.13. We will seek the transformation of this system into simple
single phase equivalents and in case of balanced operation into a per phase equivalent.
Z
sA
Z
sA
Z
sA
Z
mA
Z
mA
Z
mA
ab
E
~
bc
E
~
ca
E
~
A
B
C
a
I
~
b
I
~
c
I
~
N
Figure 2.13 A Delta Connected Three Phase Source
Let the self impedance of each leg be
A s
Z and the mutual impedance Z
mA
. The equations
describing the source are:
ab ca bc m ab s ab
E I I Z I Z V
~
)
~ ~
(
~ ~
+ + + =
A A
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.26 Copyright A. P. Sakis Meliopoulos 1990-2013
bc ca ab m bc s bc
E I I Z I Z V
~
)
~ ~
(
~ ~
+ + + =
A A
ca bc ab m ca s ca
E I I Z I Z V
~
)
~ ~
(
~ ~
+ + + =
A A
Note also that
ca ab a
I I I
~ ~ ~
=
ab bc b
I I I
~ ~ ~
=
bc ca c
I I I
~ ~ ~
=
The transformation of above equations using symmetrical components proceeds as
follows. First we write the equation in compact matrix notation.
(
(
(
+
(
(
(
(
(
(
=
(
(
(
A A A
A A A
A A A
ca
bc
ab
ca
bc
ab
s m m
m s m
m m s
ca
bc
ab
E
E
E
I
I
I
Z Z Z
Z Z Z
Z Z Z
V
V
V
~
~
~
~
~
~
~
~
~
Upon solution of the above equations for the currents:
|
|
|
.
|
\
|
(
(
(
(
(
(
(
(
(
=
(
(
(
ca
bc
ab
ca
bc
ab
s m m
m s m
m m s
ca
bc
ab
E
E
E
V
V
V
Y Y Y
Y Y Y
Y Y Y
I
I
I
~
~
~
where ) 2 /( ) (
2 2
A A A A A A
+ + =
m m s s m s s
Z Z Z Z Z Z Y
) 2 /(
2 2
A A A A A
+ =
m m s s m m
Z Z Z Z Z Y
Note that the phase currents and voltages can be expressed as:
(
(
(
=
(
(
(
(
(
(
=
(
(
(
=
ca
bc
ab
ca
bc
ab
c
b
a
abc
I
I
I
D
I
I
I
I
I
I
I
~
~
~
~
~
~
1 1 0
0 1 1
1 0 1
~
~
~
~
abc
T
c
b
a
T
c
b
a
ca
bc
ab
V D
V
V
V
D
V
V
V
V
V
V
~
~
~
~
~
~
~
1 0 1
1 1 0
0 1 1
~
~
~
=
(
(
(
=
(
(
(
(
(
(
=
(
(
(
abc
T
c
b
a
T
c
b
a
ca
bc
ab
E D
E
E
E
D
E
E
E
E
E
E
~
~
~
~
~
~
~
1 0 1
1 1 0
0 1 1
~
~
~
=
(
(
(
=
(
(
(
(
(
(
=
(
(
(
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.27
With the above definition, the matrix equation becomes:
abc
T
abc
T
abc
E DYD V DYD I
~ ~ ~
=
Substituting the phase currents and voltages with their symmetrical components, the
above equation becomes:
120
1
120
1
120
~ ~ ~
E T TDYD V T TDYD I
T T
=
Note that:
(
(
(
0 0 0
0 ) ( 3 0
0 0 ) ( 3
1
m s
m s
T
Y Y
Y Y
T TDYD
Upon substitution, the above equations become:
1 1 1
~
) ( 3
~
) ( 3
~
E Y Y V Y Y I
m s m s
=
2 2 2
~
) ( 3
~
) ( 3
~
E Y Y V Y Y I
m s m s
=
0 0 0
~
0
~
0
~
E V I =
These equations are represented by the equivalent circuit of Figure 2.14.
1
~
E
3(Y
s
- Y
m
)
1
~
I
1
~
V
0
~
V
2
~
E
3(Y
s
- Y
m
)
2
~
I
2
~
V
0
~
I
Figure 2.14 Equivalent Sequence Network Representation of the Source of Figure
2.13
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.28 Copyright A. P. Sakis Meliopoulos 1990-2013
Now recall that
(
(
(
(
(
(
=
(
(
(
=
(
(
(
0
2
1
2
2 2
2
0
2
1
1
~
~
~
0 ) 1 ( ) 1 (
0
0 1 1
~
~
~
~
~
~
E
E
E
a a
a a a a
a a
E
E
E
T D
E
E
E
T
ca
bc
ab
Observe that
0
30
3 1
j
e a
=
0
30 2
3 1
j
e a =
0
90 2
3
j
e a a =
0
90 2
3
j
e a a
=
The first two equations are
2
30
1
30
~
3
~
3
~
0 0
E e E e E
j j
ab
+ =
2
90
1
90
~
3
~
3
~
0 0
E e E e E
j j
bc
+ =
Solution for
2 1
~
,
~
E E yields
bc
j
ab
E e E E
~
3
1 ~
3
1 ~
0
120
1
=
bc
j
ab
E e E E
~
3
1 ~
3
1 ~
0
60
2
+ =
In the above equation, note that E
0
is undefined. In the case of balanced source:
E E
ab
~ ~
=
0
120
~ ~
j
bc
e E E
=
0
240
~ ~
j
ca
e E E
=
Thus:
0
30
1
~
3
1 ~
j
ab
e E E
=
0
~
2
= E
In the case of balanced operation, the above transformations are equivalent to a delta-wye
transformation. Specifically, consider the wye-connected system of Figure 2.15. Under
balanced conditions, this system is equivalent to the system of Figure 2.13, as long as the
following relationships hold:
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.29
B
A
C
a
E
~
b
E
~
c
E
~
3(Y
s
-Y
m
)
a
I
~
b
I
~
c
I
~
a
V
~
b
V
~
c
V
~
3(Y
s
-Y
m
) 3(Y
s
-Y
m
)
Figure 2.15 A Wye Connected Source
0
30
~
3
1 ~
j
ab a
e E E
=
0
120
~ ~
j
a b
e E E
=
0
240
~ ~
j
a c
e E E
=
2 2
2
) 2 ( 3
) ( 3
A A A A
A A
+
+
=
m m s s
m s
m s
Z Z Z Z
Z Z
Y Y
Special Cases: A number of special cases of the transformations discussed earlier are
presented.
Case 1: Consider three impedances connected in a delta arrangement, i.e.
0
~ ~ ~
= = =
ca bc ab
E E E
0 =
A m
Z
0 =
A s
Z
The delta-wye transformation for this case is shown in Figure 2.16a, where 3 /
A
=
s Y
Z Z .
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.30 Copyright A. P. Sakis Meliopoulos 1990-2013
Z
A
Z
A
Z
A
Z
Y
Z
Y
Z
Y
Z
A
=3Z
Y
a
b
c
a
b
c
(a)
0
30
3
~ ~
j
an ab
e E E =
an
E
~
bn
E
~
cn
E
~
ab
E
~
ca
E
~
bc
E
~
a
b
c
a
b
c
(b)
0
30
3
~ ~
j
an ab
e E E =
an
E
~
bn
E
~
cn
E
~
ab
E
~
ca
E
~
bc
E
~
a
b
c
a
b
c
Z
A
Z
A
Z
A
Z
Y
Z
Y
Z
Y
Z
A
=3Z
Y
(c)
Figure 2.16 Three Special Cases of Delta-Wye Transformations
Case 2: Consider an ideal voltage source connected in a delta arrangement, i.e.
0 = =
A A m s
Z Z
0
~
=
ab
E
0
120
~ ~
j
ab bc
e E E
=
0
240
~ ~
j
ab ca
e E E
=
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.31
The delta-wye transformation for this case is shown in Figure 2.16b, where
0
30
3
~ ~
j
an ab
e E E = .
Case 3: Consider a balanced voltage source with internal impedance but without mutual
coupling among phases, i.e.
0 =
A m
Z
0 =
A s
Z
0
~
=
ab
E
0
120
~ ~
j
ab bc
e E E
=
0
240
~ ~
j
ab ca
e E E
=
The delta-wye transformation for this case is shown in Figure 2.16c, where 3 /
A
=
s Y
Z Z
and
0
30
3
~ ~
j
a ab
e E E = .
The usefulness of above transformations will be illustrated with an example.
Example E2.5: Two three phase synchronous machines, one wye connected and the
other delta connected, are interconnected with a three phase transmission line as it is
shown in Figure E2.5a. Each synchronous machine is modeled with an equivalent
voltage source. The system operates under balanced conditions and
kV e E
kV e E
j
ab
j
An
0
0
12
0
0 . 25
~
4 . 14
~
=
=
(1) Determine the per phase equivalent circuit, (2) Compute the electric currents
c b a
I I I
~
,
~
,
~
of the three phase line, (3) Compute the three phase complex power flowing
into machine 1, and (4) Compute the three phase complex power flowing into machine 2.
An
E
~
Bn
E
~
Cn
E
~
ab
E
~
ca
E
~
bc
E
~
j3O
j5O
j3O
j3O
j5O
j5O
j15O
j15O
j15O
j1.2O
j1.2O j1.2O
a
b c
a
I
~
c
I
~
b
I
~
Synchronous
Machine 1
Synchronous
Machine 2
Figure E2.5a Two Synchronous Machines Interconnected with a Three Phase Line
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.32 Copyright A. P. Sakis Meliopoulos 1990-2013
Solution: (1) The synchronous machine 1 will be transformed into a wye connected
machine. Using the results illustrated in Figure 2.16c.
( ) kV e e e E
j j j
a
0 0 0
18 12 30
434 . 14 0 . 25
3
1 ~
= =
Ohms j
j
Z
a
0 . 1
3
0 . 3
= =
The per phase equivalent (or positive sequence) circuit is illustrated in Figure E2.5b:
j10
j1.2
a
I
~
j1.0
kV e E
j
a
0
18
434 . 14
~
=
kV e E
j
An
0
4 . 14
~
=
a
V
~
A
V
~
Figure E2.5b Per Phase Equivalent Circuit of System in Figure E2.5a
(2) First, from the circuit of Figure E2.5b we compute
kA e
j
e
I
j
j
a
0
0
4 . 171
18
369 . 0
2 . 12
4 . 14 434 . 14 ~
=
=
Next, the electric currents at the other two phases are determined by the fact that the
system is balanced, i.e.
kA e I
kA e I
j
c
j
b
0
0
6 . 68
4 . 51
369 . 0
~
369 . 0
~
=
=
(3) First, we compute the voltage at the terminals of the synchronous machine 1:
kV e I j E V
j
a a a
55 . 16
377 . 14
~
0 . 1
~ ~
= =
Then, the complex power flowing into machine 1 is:
MVAr j MW I V S
a a
199 . 2 762 . 15
~ ~
3
*
1
= =
Since the real power flow into machine 1 is positive, this machine operates as a
motor.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.33
(4) First, we compute the voltage at the terminal of the synchronous machine 2:
kV e I j E V
j
a An A
75 . 1
34 . 14
~
2 . 1
~ ~
= + =
Then, the complex power flowing into machine 2 is:
MVAr j MW I V S
A A
893 . 1 762 . 15
~ ~
3
*
2
= =
Since the real power flow into machine 2 is negative, this machine operates as a
generator.
2.9 Introduction to the Power Transmission
Problem
In this section we examine the basic problem of power transmission. For this purpose,
we consider power transmission through a single transmission line. For generality, we
assume that at both ends of the line there are both generators and loads as illustrated in
Figure 2.17. As we discussed earlier, under the assumption of symmetry and balanced
operating conditions, the system of Figure 2.17a can be replaced by its per phase
equivalent circuit (or the positive sequence network) shown in Figure 2.17b. The same
circuit can also be drawn in single line diagramform, as shown in Figure 2.17c.
Source 1 Source 2
2
~
a
V
2
~
b
V
2
~
c
V
1
~
a
V
1
~
b
V
1
~
c
V
Electric
Load 1
Electric
Load 2
(a)
1
~
V
Z
2
~
V
(b)
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.34 Copyright A. P. Sakis Meliopoulos 1990-2013
2
~
V
1
~
V
S
d1
S
d2
Z
(c)
Figure 2.17 A Simplified Two Source Electric Power System
Assume that the voltage phasors at the two ends of the line are
1
~
V and
2
~
V respectively,
or:
1
1 1
~
o j
e V V =
2
2 2
~
o j
e V V =
The power flows at the two terminals of the line are:
) ( 2 1
2
1
*
2 1
1 12
2 1
*
3
*
3
~ ~
~
3
o o
=
|
|
.
|
\
|
=
j
e
Z
V V
Z
V
Z
V V
V S
) ( 2 1
2
2
*
1 2
2 21
1 2
*
3
*
3
~ ~
~
3
o o
=
|
|
.
|
\
|
=
j
e
Z
V V
Z
V
Z
V V
V S
Another popular form of above equations is the so called hybrid fromwhere the voltages
are expressed in polar coordinates and the impedance is converted into admittance
expressed in Cartesian coordinates, i.e.
Y jb g
jx r Z
0 . 1 0 . 1
=
+
= + = , thus
2 2
x r
r
g
+
= , and
2 2
x r
x
b
+
=
Using this notation, the complex power S
21
becomes:
( )
( )
( )
jQ P
b g V V j bV j
b g V V gV
j V V jb g V jb g S
+ =
+ =
=
) cos( ) sin( 3 3
) sin( ) cos( 3 3
) sin( ) cos( ) ( 3 ) ( 3
1 2 1 2 2 1
2
2
1 2 1 2 2 1
2
2
1 2 1 2 2 1
2
2 21
o o o o
o o o o
o o o o
Thus:
( )
( ) ) cos( ) sin( 3 3
) sin( ) cos( 3 3
1 2 1 2 2 1
2
2
1 2 1 2 2 1
2
2
o o o o
o o o o
=
+ =
b g V V bV Q
b g V V gV P
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.35
This equation provides the complex power flowing into the line from the bus 2 terminal,
as a function of the voltage magnitudes at the line terminals and the terminal voltage
phase angle difference. An important special case of the presented power transmission
problem is the case where generation exists only in one line terminal. This case will be
examined next.
Electric Load Supplied via a Transmission Line. This case corresponds to the system of
Figure 2.17 with the source 2 removed. For simplicity, we assume that source 1 is a very
large generator which implies the following: (a) it can supply any amount of power and
(b) it can control the voltage at bus 1 to a constant value independent of the load. We
will examine the operation of the system as the electric load changes. Recall the
conservation of complex power law. The complex power conservation equation applied
to bus 2 is:
0
2 2 21
= + +
d d
jQ P S
Where:
2 2 2 d d d
S jQ P = + is the load complex power at bus 2.
Assuming constant power factor, the load reactive power is expressed as Q
d2
= oP
d2
where o is a constant. In this case:
0 ) 1 (
2 12
= + +
d
P j S o
or:
( ) ( )
0 ) 1 (
) cos( ) sin( 3 3 ) sin( ) cos( 3 3
2
1 2 1 2 2 1
2
2 1 2 1 2 2 1
2
2
= + +
+
d
P j
b g V V j bV j b g V V gV
o
o o o o o o o o
Without loss of generality, we can assign o
1
=0.0. Then:
( ) ( ) 0 ) 1 ( cos sin 3 3 sin cos 3 3
2 2 2 2 1
2
2 2 2 2 1
2
2
= + + +
d
P j b g V V j bV j b g V V gV o o o o o
The above equation links the voltage magnitude to the electric load P
d2
at bus 2. For a
given P
d2
, the equation can be numerically solved for V
2
. A typical variation of the
voltage magnitude V
2
versus the electric load P
d2
is shown in Figure 2.18.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.36 Copyright A. P. Sakis Meliopoulos 1990-2013
V
2
P
d2
Q
d2
= o P
d2
1.0
Power Factor
Leading
o < 0
Power Factor
Lagging
o > 0
P
max
P
max
0.0
Figure 2.18 Typical Variation of the Voltage Magnitude V
2
versus Electric Load
For a special case whereby the line resistance is neglected (g=0), a closed form solution
can be obtained for V
2
. Specifically in this case the power equations become:
2 2 2 1
2
2 2
2 2 1 2
cos 3 3
sin 3
d d
d
P b V V bV Q
b V V P
o o
o
= + =
=
The above equations can be solved for V
2
as a function of P
d2
as follows:
2 2 2 1
) sin( 3
d
P V bV = o (2.6a)
2
2 2 2 2 1
3 ) cos( 3 bV P V bV
d
+ = o o (2.6b)
Upon squaring and adding above equations:
( ) ( )
2
2 2
4
2
2 2
2
2 2
2 1
6 9 1 3 V bP V b P V bV
d d
o o + + =
Rewrite equation as:
( ) ( ) 0 1 9 6 9
2
2
2 2
2
2
1
2
2
4
2
2
= + + +
d d
P V V b bP V b o o
Solution for V
2
yields:
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.37
2
2
2
2 2 2 2
1
2
2
2
1
2
2 2
2
18
) 1 ( 36 ) 9 6 ( 9 6
b
P b V b bP V b bP
V
d d d
o o o + + +
= (2.7)
The related problem of transfer capability is defined as the maximum P
d2
which can be
transferred through the line. For this purpose we need to determine the maximum P
d2
for
which the equation for V
2
above has a solution, i.e. the quantity inside the square root is
non-negative:
0 ) 1 ( 36 ) 9 6 (
2
2
2 2 2 2
1
2
2
> + +
d d
P b V b bP o o
The above inequality is a quadratic equation in terms of P
d2
. When the left side is equal
to zero, the solution for P
d2
provides the maximum power that can be transferred through
the line, P
d max
:
0 9 12 4
4
1
4
max
2
1
3 2
max
2
= + + V b P V ab P b
d d
Solution of this equation yields:
( )
2 2
1 max ,
1
2
3
o o +
|
.
|
\
|
= V
b
P
d
Note that the quadratic equation will have two solutions. Only one is admissible (the one
given above) since the other solution provides a negative power. Upon substitution of the
maximum transferable power into the equation for the voltage magnitude, the following
relationship is obtained:
2 2 1
2
1 1
2
o o o + + =
V
V
In this analysis we have assumed that the source is infinitely large, i.e. it can supply any
amount of real power and it can control the voltage at bus 2 to 1.0 pu. It is expedient to
ask the question: how much reactive power must be generated by the source to sustain the
real power transfer capability. For this purpose, the reactive power output of the source
can be computed as a function of the transferred real power P
d2
. The complex power
supplied by the source is:
( )
*
2
*
1 1 1
~ ~
) (
~
V V jb g V S
g
=
The reactive power supplied by the source is:
) Im(
1 1 g g
S Q =
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.38 Copyright A. P. Sakis Meliopoulos 1990-2013
Note that for each value of transferred power P
d2
, the voltage magnitude V
2
can be
computed from equation (2.7) and the phase angle (o
1
-o
2
) can be computed from equation
(2.6a). Then using above equations, the reactive power of the source can be computed.
The equations are complicated and are left as an exercise for the reader.
The transfer capability of transmission circuits is demonstrated with an example, next.
Example E2.6: A two bus, one generating unit electric power system operates in such a
way that 3 / 115
~
1
kV V = , and the electric load at bus 2 has a unity power factor. The
positive sequence impedance of the line is Z=j29.75 ohms. The system is illustrated in
Figure E2.6.
(a) Compute the maximum real power P which can be transmitted through the power
line, P
max
.
(b) Compute the magnitude of the voltage
~
V
2
, i.e. V
2
, and the reactive power generated
by the source versus P for the range P = [ 0.0 to P
max
].
1 2
j29.75O
1
~
V
o j
e V V
2 2
~
=
S = P + j0.0
Figure E2.6
Solution: (a) For this system
mhos b 03361 . 0
75 . 29
1
= =
kV
kV
V 395 . 66
3
115
1
= = , and 0 . 0 = o
The maximum power that can be transferred is:
( ) MW 27 . 222 1
2
3
2 2
1 max ,
= +
|
.
|
\
|
= o o V
b
P
d
At this power the voltage will be
kV 948 . 46
2
1
2
= =
V
V
(b) Upon substitution of numerical values into equation (2.6), the voltage magnitude and
source reactive power versus transferred power is obtained.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.39
MW in P kV P V , 34027 . 98 26 . 268 , 858 , 4 148 . 204 , 2
2
2
+ = kV,
MW in P MVAr
V
P
V Q
g
,
8269 . 44
0 . 1 6953 . 6 534 . 444
2
2
2
2 1
=
Using above equations, Table E2.6 is generated which provides the voltage magnitude
and source reactive power for several values of transferred power is the range 0 to 222.27
MWs. Note that at the maximum power transfer, the reactive power generation at the
source equals (numerically) the transferred real power. This means that the power factor
of the source at this point will be 0.707.
Table E2.6 Tabulated Values of Voltage Magnitude and Source Reactive Power vs.
Transferred Power
Transferred Power
(MW)
Voltage Magnitude at
Load, V
2
(kV)
Source Reactive
Power, Q
gen
(MVAr)
0.00 66.395 0.0
50.00 65.970 5.74
100.00 64.600 23.78
150.00 61.900 58.22
200.00 56.270 125.31
222.27 46.948 222.27
2.10 Non-sinusoidal Operation
Recent developments in power system components resulted in elements which operate by
switching and therefore changing topologies within one period of operation. These
devices distort the sinusoidal waveform of voltages and currents. The distorted
waveform is described in terms of harmonics resulting from a Fourier analysis.
Waveform distortion necessitates a new way of analysis and system description.
Consider a point in an electric power system. Let v(t) and i(t) be the voltage and electric
current at this point. If v(t) and i(t) are not pure sinusoids but periodic, they can be
expanded into a Fourier series, i.e.
( )
+ =
i
i i
t i a t v u e cos ) (
( )
+ =
i
i i
t i b t i e cos ) (
The real power is computed as the average power flow, i.e.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.40 Copyright A. P. Sakis Meliopoulos 1990-2013
}
=
=
T
t
dt t i t v
T
P
0
) ( ) (
1
Using above Fourier expansion, the real power is
=
i
i i
i i
b a
P ) cos(
2
u
Note that the real power can be determined directly from the definition of real power.
However, for reactive power it is conceptually difficult to develop a simple defining
equation as it has been done for the case of pure sinusoidal waveforms. To overcome this
difficulty, the concept of distortion power is introduced. Specifically, the distortion power
D is defined from the equation
2 2 2 2
D Q P S
b
+ + =
where
S is the apparent power defined as the product of the voltage and electric current
rms values, i.e. S = V
rms
I
rms
P is the real power
Q
b
is the reactive power of the fundamental component,
i.e. ) cos(
2
1 1
1 1
u =
b a
Q
b
D is the distortion power.
The concepts discussed above will be illustrated with an example.
Example E2.7: An electric load is connected to an ideal voltage source. The voltage of
the source is:
( ) V t t v e cos 100 2 ) ( =
The electric load distorts the current waveform resulting in an electric current equal to:
( ) ( ) A t t t i
0 0
21 3 cos 10 2 10 cos 50 2 ) ( + = e e
Compute: (a) The real power absorbed by the electric load, (b) the reactive power at the
fundamental frequency, and (c) the distortion power.
Solution:
(a) The real power is
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.41
W
dt t t
T
dt t t
T
dt t i t v
T
P
T T
T
924 , 4 W 10 cos 000 , 5
) 21 3 cos( cos
000 , 2
) 10 cos( cos
000 , 10
) ( ) (
1
0
0
0
0
0
0
= =
+ =
=
} }
}
e e e e
(b) The reactive power, of the fundamental frequency, is
VAr 24 . 868 10 sin ) 50 ( ) 100 ( = =
b
Q
(c) First we compute the rms values of the voltage and current:
V V
rms
100 =
A I
rms
9902 . 50 10 50
2 2
= + = , and
VA I V S
rms rms
02 . 099 , 5 = =
The distortion power is
VAd 19 . 1000 24 . 868 4924 02 . 5099
2 2 2 2 2 2
= = =
b
Q P S D
Note that we use the convention VAd for the units of distortion power.
2.11 Summary
In this chapter we have provided an overview of basic concepts utilized in the analysis of
power systems. We have introduced the concepts of sinusoidal steady state operation,
phasors, symmetrical components, complex power conservation, and network analysis
methods. The basic concepts were applied to address the problem of power transfer
capability for a simple electric power system. In later chapters, these concepts will be
utilized to formulate and solve a variety of analysis problems. For completeness, we have
also introduced the concepts of reactive power and distortion power under non-sinusoidal
but periodic steady state operation of an electric power system.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.42 Copyright A. P. Sakis Meliopoulos 1990-2013
2.12 Problems
Problem P2.1. A single phase electric load is connected to a 480 volt source and absorbs
15 kW at a power factor of 0.80, electric current lagging.
(a) Compute the reactive power of the load.
(b) Compute the complex power.
(c) Compute the apparent power.
(d) Assume the line voltage phase angle to be zero degrees and compute the electric
current phasor (magnitude and phase) and the expression of the instantaneous
power, p(t), as a function of time.
Solution: (a) Expressing the real power of the system:
( ) ( ) A I kW I 55 . 22 15 3 8 . 0 480 = =
0
869 . 36 8 . 0 cos = = o o
( ) VAr I Q 248 , 11 sin
3
480
3 = |
.
|
\
|
= o
(b) ( ) ( )( ) kVAr j kW j I V S 248 . 11 15 6 . 0 8 . 0 55 . 22
3
480
3
~ ~
3
*
+ = |
.
|
\
|
= =
(c) kVA S
a
747 . 18 =
(d)
0
869 . 36
55 . 22
~
j
e I
=
( ) ( ) ( ) ( ) ( ) ( ) ( )VA t t t t t p
0 0
869 . 36 cos cos 495 , 37 869 . 36 cos 55 . 22 2 cos
3
480
2 3 = |
.
|
\
|
= e e e e
Problem P2.2. Figure P2.2 illustrates a three phase power system which consists of a
wye connected source, a delta connected synchronous motor, a delta connected load, and
two transmission lines. For simplicity the internal impedance of both source and motor is
assumed to be zero. The system is symmetric and operates under balanced conditions.
The following have been measured:
kV e E
j
a
0
0
2 . 7
~
= , kV e E
j
AB
0
5
0 . 12
~
=
a) Compute the electric currents
a
I
~
and
AB
I
~
shown in Figure P2.1. Provide both
magnitude and phase.
b) What is the total real power absorbed by the motor?
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.43
2 + j10O
A
B C
j210O
j
2
1
0
O
j
2
1
0
O
2 + j10O
2 + j10O 2 + j10O
2 + j10O
2 + j10O
b c
a
Source
Motor
j3O
j3O
j3O
j3O
j3O j3O
b
E
~
c
E
~
AB
E
~
CA
E
~
BC
E
~
a
E
~
AB
I
~
a
I
~
b
I
~
c
I
~
Figure P2.2
Solution: (a) The positive sequence network is illustrated in the figure.
70
j7
I
a
~
2
6.928e
-j25
0
7.2e
-j0
0
j7
I
A
~
2
V
~
Kirchoffs current law at node 1 yields:
0
7 2
928 . 6
~
70
~
7 2
2 . 7
~
0
25
=
+
+ +
+
j
e V
j
V
j
V
j
Solution of above for the voltage yields:
kV e V
j
0
48 . 11
567 . 6
~
=
Then:
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.44 Copyright A. P. Sakis Meliopoulos 1990-2013
Amperes e
j
V
I
j
a
0
35 . 14
2079 . 0
7 2
2 . 7
~
~
=
+
=
Amperes e
e
j
e V
I
j
j j
AB
0
0 0
4 . 40
30 25
129 . 0
3
7 2
93 . 6
~
~
=
+
=
(b) The power absorbed by the motor is:
( )( ) MVA e
j
e V
e S
j
j
0
0
0
4 . 35
*
25
25
635 . 4
7 2
93 . 6
~
93 . 6 3
=
|
|
.
|
\
|
+
=
( ) MW S P 778 . 3 Re = =
Problem P2.3. Determine whether a three phase wye connected, neutral grounded
element has an equivalent delta connected element.
Solution: No. The delta arrangement does not represent the neutral.
Problem P2.4. A three phase electric load consumes a total of 25 MW of real power
with a 0.85 power factor, electric current leading when connected to a 12 kV line to line
system. Compute the line electric current and determine the minimum reactive power
required to correct the power factor to 0.95.
Solution:
0
79 . 31 ) 85 . 0 arccos(
1 . 415 , 1
3 ) (
~
j j
L L
line
e e
pf V
P
I = =
( ) MVAr MW pf Q 49 . 15 79 . 31 tan 25 ) 85 . 0 (
0
= = =
( ) MVAr MW pf Q 22 . 8 19 . 18 tan 25 ) 95 . 0 (
0
= = =
Needed MVAr is the difference: -7.27 MVAr (inductive).
Problem P2.5. A single phase electric load is connected to a 480 volt source and absorbs
15 kW at a power factor of 0.80, electric current lagging.
(a) Compute the reactive power of the load.
(b) Compute the complex power.
(c) Compute the apparent power.
(d) Assume the line voltage phase angle to be zero degrees and compute the electric
current phasor (magnitude and phase) and the expression of the instantaneous
power, p(t), as a function of time.
Problem P2.6. The illustrated power system in Figure P2.6 is symmetric and operates
under balanced conditions. The voltages of the machines are: kV e E
j
a
0
0
2 . 7
~
= ,
kV e E
AB
0
5
0 . 12
~
= .
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.45
(a) Draw the per phase equivalent circuit.
(b) Compute the complex power absorbed by the delta connected capacitor
bank.
(c) Compute the complex power (total three phase) flowing into the
synchronous machine 2.
(d) Which synchronous machine operates as a generator and which as a
motor?
j10O
A
B C
j10O
j10O
j5O
b c
a
Synchronous
Machine 2
j5O
j5O
- j580O - j580O
- j580O
Capacitor
Bank
Synchronous
Machine 1
j4O
j4O j4O j2O
j2O
j2O
b
E
~
c
E
~
AB
E
~
CA
E
~
BC
E
~
a
E
~
AB
I
~
Figure P2.6
Solution: (a) Build the positive sequence network: Line 1: j6 ohms, capacitor: -j580/3
ohms, Line 2: j3 ohms, Machine 1: kV e E
j
a
0
0
2 . 7
~
= , Machine 2:
kV e E
AN
0
25
928 . 6
~
=
(b) Solution of the circuit yields the following voltage at the capacitor bank:
kV e E
CN
0
51 . 16
94 . 6
~
= . The capacitor power is:
MVAr E j S
CN
747 . 0
3
580
3
2
1
=
|
.
|
\
|
=
(c) Machine 2 power (going into machine)
MVAr j MW E
j
E V
S
AN
AN CN
443 . 0 10 . 7
~
3
~ ~
3
*
2
+ =
|
|
.
|
\
|
=
(d) Since machine 2 absorbs real power, it operates as motor. Therefore, machine 1
operates as generator.
Problem P2.7. The positive sequence equivalent circuit of a three bus system is
illustrated in the Figure P2.7. Generator G1 injects an electric current
1
~
I while generator
G2 injects an electric current
2
~
I at buses 1 and 2 respectively. (a) Compute the complex
power absorbed at the electric load if
1
~
I = 1,000 A and
2
~
I = 1,200e
j5
0
A, (b) Compute
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.46 Copyright A. P. Sakis Meliopoulos 1990-2013
the complex power flow in circuit 2-3, and (c) compute the complex power provided by
generating unit G2.
1
~
I
2
~
I
G
1
G
2
1 2
3
Electric
Load
0.03 - j0.002
O
-j1
O
5-j1
O
10-j2
O
Figure P2.7
Solution: The nodal equations are:
(
(
(
=
(
(
(
(
(
(
+
+ +
+
0
200 , 1
000 , 1
~
~
~
002 . 2 03 . 5 1 5 1
1 5 3 15 2 10
1 2 10 3 10
0
5
3
2
1
j
e
V
V
V
j j j
j j j
j j j
V e V j V
j
0
684 . 6
1
549 , 73 560 , 8 049 , 73
~
= + =
V e V j V
j
0
646 . 6
2
477 , 73 505 , 8 983 , 72
~
= + =
V e V j V
j
0
541 . 6
3
102 , 73 328 , 8 626 , 72
~
= + =
( ) | | phase per MVAr j MW V j V S 688 . 10 317 . 160
~
002 . 0 03 . 0
~
*
3 3 3
+ = =
( )( ) | | phase per MVAr j MW V V j V S 85 . 21 68 . 147
~ ~
1 5
~ *
3 2 2 23
= =
( ) phase per MVAr j MW e V S
j
g
532 . 2 172 . 88 200 , 1
~ *
5
2 2
+ = =
Problem P2.8. Consider a single phase power system which has the equivalent circuit
shown in the Figure P2.8. All pertinent data are given in the Figure.
(a) Compute the voltage phasors (magnitude and phase) at nodes 1, 2, and 3.
(b) Compute the complex power, S = P + jQ, absorbed by the electric load.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.47
1 2
3
Electric
Load
0.01 - j0.001
O
-j1
O
-j2
O
j0.001
O
A I
g
1000
~
=
Figure P2.8
Solution: (a) The nodal equations are:
(
(
(
(
(
(
=
(
(
(
3
2
1
~
~
~
001 . 3 01 . 0 2 1
2 999 . 1 0
1 0 1
0
0
1000
V
V
V
j j j
j j
j j A
Upon solution:
Volts
e
V
V
V
j
(
(
(
=
(
(
(
0 . 000 , 100
0 . 050 , 100
0 . 005 , 100
~
~
~
0
57 . 0
3
2
1
(b)
( ) 100 000 , 1 001 . 0 01 . 0
~ ~
3
j j V I
L
= =
MVAr j MW I V S
L
0 . 10 0 . 100
~ ~
*
3
+ = =
Problem P2.9. Consider the simplified electric power system of Figure P2.9 consisting
of a balanced generator, a symmetric transmission line and a symmetric electric load.
Each phase of the symmetric line has a self impedance of j9 ohms. The mutual
impedance between any two phases is j4 ohms with the indicated polarity. Other system
parameters are indicated in the figure. Compute the real power absorbed by the electric
load.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.48 Copyright A. P. Sakis Meliopoulos 1990-2013
b c
a
b c
a
j9O
j9O
j9O
j4O
j4O
j4O
R+jX
R+jX R+jX
R = 35 O
X = 15 O
b
E
~
c
E
~
a
E
~
kV e E
j
a
0
92 . 6
~
=
Figure P2.9
Solution: The positive sequence model is:
6.92 e
j15O
35O
j5O
I
~
j0
0
S/3
kA e
j
I
j
0
745 . 29
1717 . 0
20 35
92 . 6 ~
=
+
=
( )( ) ( )( ) MVAr j MW MVA j I j I V S 327 . 1 095 . 3 1717 . 0 45 105 15 35 3
~ ~
3
2 2 *
+ = + = + = =
Thus:
MW P
load
095 . 3 =
Problem P2.10. Consider a simplified electric power system consisting of a three phase
source, a symmetric three phase transmission line and a symmetric three phase electric
load. Assume that the source voltage is 230 kV line to line and remains constant. The
positive sequence series impedance of the line is j57.5 ohms. The power factor of the
electric load is 0.90 current lagging and remains constant.
Compute the maximum total power that can be transferred from the source to the load
under the specified conditions.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.49
Compute and graph the voltage at bus 2 and the reactive power of the source versus the
transferred power.
What will the maximum transfer capability if the power factor is 0.9 current leading and
remains constant?
Solution: The maximum power transfer is:
( )
2 2
1 max
1
2
3
o o + = V
b
P
where:
( )
( )
4843 . 0
842 . 25 cos
842 . 25 sin
0
0
= = o
Thus: MW P 33 . 288
max
=
The graph of the voltage and reactive power as a function of P is given below.
Leading power factor:
( )
( )
4843 . 0
842 . 25 cos
842 . 25 sin
0
0
=
= o
Thus: MW P 88 . 733
max
=
Problem P2.11. Figure P2.11 illustrates a simplified power system consisting of two
synchronous machines, a phase shifting transformer and a line. Assume that the
synchronous machines are ideal voltage sources and that the phase shifter consists of
ideal transformers. Specifically, all illustrated transformers are ideal with a
transformation ratio of secondary to primary voltage equal to 0.5
|
|
.
|
\
|
= 5 . 0
Pr ge imaryVolta
oltage SecondaryV
. Note that the primary is designated as P and the secondary
as S. The voltages of the synchronous machines are:
0 0 0
240
1 1
120
1 1
0
1
~ ~
,
~ ~
, 66 . 8
~
j
a c
j
a b
j
a
e E E e E E kV e E
= = =
0 0 0
240
2 2
120
2 2
0
2
~ ~
,
~ ~
, 0 . 9
~
j
a c
j
a b
j
a
e E E e E E kV e E
= = =
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.50 Copyright A. P. Sakis Meliopoulos 1990-2013
Compute the total electric power absorbed or generated by the synchronous machine 2.
b
E
1
~
c
E
1
~
a
E
1
~
b
E
2
~
c
E
2
~
a
E
2
~
0.2-j1.0
O
0.2-j1.0
O
0.2-j1.0
O
S P P
P
P
S
S
S
S
P
S
P
Figure P2.11
Solution: Since the phase shifter is an ideal transformer we can compute the voltage on
the right hand side of the phase shifter. Specifically, the phase A voltage on the right
hand side of the transformer is:
( ) kV j E E E V
c b a a
75 . 3 66 . 8
~ ~
25 . 0
~ ~
1 1 1
+ = =
( )( ) kA e j j I
j
0
49 . 16
8399 . 3 0 . 9 75 . 3 66 . 8 2 . 0
~
= + =
MVAr j MW I E S
a
429 . 29 41 . 99
~ ~
3
*
2
= = , absorbed power
Problem P2.12. Consider the simplified electric power system of Figure P2.12 consisting
of a balanced generator, a symmetric transmission line and a symmetric electric load.
Each phase of the symmetric line has a self impedance of j9 ohms. The mutual
impedance between any two phases is j4 ohms. Other system parameters are indicated in
the figure. Compute the real power absorbed by the electric load.
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.51
E
a
~
+
j9O
j9O
j9O
j4O
j4O
j4O
R+jX R+jX
R+jX
R = 36 O
X = 15 O
E
a
=6.92 e
j0
kV
~
Figure P2.12
Solution: The positive sequence model is:
6.92 kV
j5O
12O
j5O
V
I
~
~
kA e
j
I
j
0
8 . 39
443 . 0
10 12
92 . 6 ~
=
+
=
( )( ) ( )( ) MVAr j MW MVA j I j I V S 944 . 2 065 . 7 443 . 0 15 36 5 12 3
~ ~
3
2 2 *
+ = + = + = =
Thus:
MW P
load
065 . 7 =
Problem P2.13. Figure P2.13 illustrates a three phase power system which consists of a
wye connected source, a delta-wye connected transformer, a three phase transmission line
and an induction motor. The figure provides the impedances of the various components
of the system. Note that the system is fully symmetric and for each device the impedance
of only one phase is provided. If applicable one mutual impedance is also provided. It
should be understood that the impedances of the other phases are identical and the mutual
impedances between any two phases are also identical. The transformer ratio is 5 . 16 = t .
At a certain instant of time, the system operates under balanced conditions and the phase
A current and voltage of the induction motor is:
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Page 2.52 Copyright A. P. Sakis Meliopoulos 1990-2013
Amperes e I
j
ma
0
7 . 21
0 . 285
~
= , kVolts e V
j
ma
0
0
95 . 7
~
=
a) Compute the real and reactive power absorbed by the induction motor provide the
total power.
b) Compute the power factor of the induction motor.
c) Compute the electric current
ga
I
~
of the generator phase A and the voltage
ga
V
~
of
the generator of the same phase.
b) Compute the real and reactive power delivered at the terminals of the generator
provide the total power.
j0.02O
-j0.02O
I
ga
V
ga
~ ~
1:t
j0.21O 0.1O
j0.06O
j0.80O 0.02O I
ma
V
ma
~ ~
Generator Transmission Line Motor Transformer
E
a
~
Figure P2.13
Solution: Since the system operates under balanced conditions, the voltages and currents
of phases B and C at any point of the system is same as phase A voltages and currents
with a phase angle difference of 120 and 240 degrees respectively.
(a) MVAr j MW MVA e I V S
j
ma ma m
513 . 2 315 . 6 797 . 6
~ ~
3
0
7 . 21 *
+ = = =
(b) ( ) 9291 . 0 7 . 21 cos
0
= = pf
(c) The voltage at the right hand side of the transformer, phase A is:
( ) ( ) ( )( ) ( )
ma ma mc mb ma ma ma ta
I j V I I j I j I j V V
~
95 . 0 12 . 0
~ ~ ~
06 . 0
~
21 . 0 1 . 0
~
80 . 0 02 . 0
~ ~
+ + = + + + + + + =
( ) Volts e I j V V
j
ma ma ta
0
69 . 1
088 . 085 , 8
~
95 . 0 12 . 0
~ ~
= + + =
The voltage and current on the left hand side of the transformer is:
( ) Volts e V
t
e V V V V
j
ta
j
ga gb ga gab
0 0
69 . 1 120
01 . 490
~ 1
1
~ ~ ~ ~
= = = =
Power System Modeling, Analysis and Control: Chapter 2, Meliopoulos
Copyright A. P. Sakis Meliopoulos 1990-2013 Page 2.53
Thus: ( ) Volts e V
t
e V
j
ta
j
ga
0 0
31 . 28
1
120
90 . 282
~ 1
1
~
= =
0
7 . 21
5 . 702 , 4
~ ~
j
ma ta
e I t I
= =
( )
0 0
7 . 51 240
97 . 144 , 8 1
~ ~ ~ ~
j j
ta tc ta ga
e e I I I I
= = =
(d) MVAr j MW MVA e I V S
j
ga ga g
744 . 2 345 . 6 913 . 6
~ ~
3
0
39 . 23 *
+ = = =
Problem P2.14. Consider the normalized model of a transmission line in Figure P2.x.
Under the present operating conditions, the voltages at the terminals of the transmission
line are (magnitude in pu, phase in radians):
67 . 0
1
02 . 1
~
j
e V =
,
25 . 0
2
99 . 0
~
j
e V = , phase angles are in radians
Compute the complex power flow (real power and reactive power) at the left side of the
transmission line.
Figure P2.14
Solution:
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Commissioning of Combined Cycle Power PlantsDocument23 pagesCommissioning of Combined Cycle Power PlantsJosé Nolasco100% (2)
- IEEE Kundur & Taylor - The Anatomy of A Power Grid BlackoutDocument8 pagesIEEE Kundur & Taylor - The Anatomy of A Power Grid BlackoutGustavo AguayoNo ratings yet
- Statcom Using AtpdrawDocument6 pagesStatcom Using AtpdrawEleazar Sierra EspinozaNo ratings yet
- Markov Chains (Part 3) : State ClassificationDocument19 pagesMarkov Chains (Part 3) : State ClassificationEleazar Sierra EspinozaNo ratings yet
- Solutions To HW9Document12 pagesSolutions To HW9Eleazar Sierra EspinozaNo ratings yet
- Continuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument24 pagesContinuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinEleazar Sierra EspinozaNo ratings yet
- An EMTP - RV Based Analysis of The Line SurgeDocument6 pagesAn EMTP - RV Based Analysis of The Line SurgeEleazar Sierra EspinozaNo ratings yet
- Study of Electromagnetic TransientDocument8 pagesStudy of Electromagnetic TransientEleazar Sierra EspinozaNo ratings yet
- Testing of Circuit Breaker and Over Current Relay Implementation by Using MATLAB / SIMULINKDocument13 pagesTesting of Circuit Breaker and Over Current Relay Implementation by Using MATLAB / SIMULINKCesar MachadoNo ratings yet
- Power Quality Nee042Document1 pagePower Quality Nee042Akshay ChaudhryNo ratings yet
- Reader Guide To Subsynchronous ResonanceDocument8 pagesReader Guide To Subsynchronous ResonancetunghtdNo ratings yet
- 2023 NERC Guide Inverter-Based-ResourcesDocument6 pages2023 NERC Guide Inverter-Based-ResourcestaigerasNo ratings yet
- Training CatalogDocument10 pagesTraining Catalogvali77No ratings yet
- StudyDocument87 pagesStudymazzoffaNo ratings yet
- VFT Study For EHV-GIS Substation: Amit Kumar and Mahesh K. MishraDocument6 pagesVFT Study For EHV-GIS Substation: Amit Kumar and Mahesh K. Mishraarunw110No ratings yet
- Siemens Power Engineering Guide 7E 56Document1 pageSiemens Power Engineering Guide 7E 56mydearteacherNo ratings yet
- New Text DocumentDocument97 pagesNew Text DocumentDusan MiticNo ratings yet
- 3 Course StudiesDocument16 pages3 Course Studiestaz_taz3No ratings yet
- Flexible Curricula B.tech. B.arch. 2015 OnwardsDocument88 pagesFlexible Curricula B.tech. B.arch. 2015 OnwardsVenkat KrishnaNo ratings yet
- Economic Dispatch - OPFDocument1 pageEconomic Dispatch - OPFAlok AgrawalNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological UniversityBhavik PrajapatiNo ratings yet
- 117CT - Electrical Distribution Systems PDFDocument8 pages117CT - Electrical Distribution Systems PDFvenkiscribd444No ratings yet
- Bachelor of Science in Computer Science B.Sc. (Computer Science) Summary of Undergraduate CoursesDocument26 pagesBachelor of Science in Computer Science B.Sc. (Computer Science) Summary of Undergraduate CoursesMartin7_10% (1)
- Hybrid Power Systems Based On Renewable Energies-A Suitable and Cost-Competitive Solution For Rural Electrification PDFDocument7 pagesHybrid Power Systems Based On Renewable Energies-A Suitable and Cost-Competitive Solution For Rural Electrification PDFbdsrlNo ratings yet
- Etap 18 New Features BrochureDocument12 pagesEtap 18 New Features BrochureChetan KotwalNo ratings yet
- Electrical&Computer Engin (ECE)Document9 pagesElectrical&Computer Engin (ECE)Saad MuftahNo ratings yet
- DbatuDocument30 pagesDbatuLaxmikant BagaleNo ratings yet
- Analysis of Subsynchronous Resonance in Power SystemsDocument271 pagesAnalysis of Subsynchronous Resonance in Power SystemsAnonymous KTvCCMarbNo ratings yet
- Superconducting Fault Current EPRIDocument68 pagesSuperconducting Fault Current EPRIhozan_soranNo ratings yet
- What Is Excitation System - Definition & Types of Excitation System - Circuit GlobeDocument11 pagesWhat Is Excitation System - Definition & Types of Excitation System - Circuit GlobeSabaMannan123No ratings yet
- Neta BKM PDFDocument184 pagesNeta BKM PDFRyan Jay100% (3)
- Design of Unified Power Quality Conditioner Using Fuzzy Logic Controller To Improve Power QualityDocument76 pagesDesign of Unified Power Quality Conditioner Using Fuzzy Logic Controller To Improve Power QualityPhani PhaniNo ratings yet
- Line Differential ProtectionDocument3 pagesLine Differential ProtectionAashwinAndeNo ratings yet
- Cat Switchgear - Eaton Consulting Application GuideDocument58 pagesCat Switchgear - Eaton Consulting Application GuideFélix VelascoNo ratings yet
- Course Handout PSIIDocument4 pagesCourse Handout PSIINishant SaxenaNo ratings yet
- HVDC 8Document124 pagesHVDC 8Bvijaya krishnaNo ratings yet