You might also like
- BionicDocument13 pagesBionicMANNE SAHITHINo ratings yet
- Achieving Hover Equilibrium in Free Flight With A Flexible Flapping WingDocument23 pagesAchieving Hover Equilibrium in Free Flight With A Flexible Flapping Wingiwe1234No ratings yet
- Aerodynamic Characteristics of The Wing and Body of A Dragonfly - Okamoto 1996Document14 pagesAerodynamic Characteristics of The Wing and Body of A Dragonfly - Okamoto 1996Konstantin PredachenkoNo ratings yet
- The Control of Flight Force by A Flapping Wing: Lift and Drag ProductionDocument21 pagesThe Control of Flight Force by A Flapping Wing: Lift and Drag ProductionRAJARATNANo ratings yet
- PHYSICAL REVIEW FLUIDS 4, 110503 (2019) : Flight of The Fruit FlyDocument4 pagesPHYSICAL REVIEW FLUIDS 4, 110503 (2019) : Flight of The Fruit FlyYZNo ratings yet
- 1999 Science - Dickinson Et Al - Wing Rotation and The Aerodynamic Basis of Insect FlightDocument8 pages1999 Science - Dickinson Et Al - Wing Rotation and The Aerodynamic Basis of Insect Flightagro nomNo ratings yet
- Accepted ManuscriptDocument14 pagesAccepted ManuscriptStiven CastellanosNo ratings yet
- The Aerodynamics of Hummingbird Flight: January 2007Document6 pagesThe Aerodynamics of Hummingbird Flight: January 2007tecnosport neiraNo ratings yet
- UA Micro Ornithopters Aerodynamic TestingDocument13 pagesUA Micro Ornithopters Aerodynamic TestingHao Yi OngNo ratings yet
- J Exp Biol 2001 SaneDocument21 pagesJ Exp Biol 2001 SaneAntonio Martín AlcántaraNo ratings yet
- A Review On Studies of The Aerodynamics of Different Types of Maneuvers Inn DragonfliesDocument34 pagesA Review On Studies of The Aerodynamics of Different Types of Maneuvers Inn DragonfliesDR. RockyNo ratings yet
- Aerodynamics of Animal FlightDocument5 pagesAerodynamics of Animal Flightபிரபாகரன் ஆறுமுகம்No ratings yet
- Ellington 1986Document16 pagesEllington 1986samik4uNo ratings yet
- 2010 AST Flapping Membrane WingDocument12 pages2010 AST Flapping Membrane WingAakriti TripathiNo ratings yet
- Dragonflies Utilize Flapping Wings' Phasing and Spanwise Characteristics To Achieve Aerodynamic PerformanceDocument15 pagesDragonflies Utilize Flapping Wings' Phasing and Spanwise Characteristics To Achieve Aerodynamic PerformanceDevendraKumarNo ratings yet
- Bat Flight: Aerodynamics, Kinematics and Flight Morphology: Anders Hedenstro ̈ M and L. Christoffer JohanssonDocument11 pagesBat Flight: Aerodynamics, Kinematics and Flight Morphology: Anders Hedenstro ̈ M and L. Christoffer JohanssonMondoskisNo ratings yet
- Evolution of Flight in Bats - Bishop 2008 PDFDocument18 pagesEvolution of Flight in Bats - Bishop 2008 PDFValeryNo ratings yet
- A Three Dimensional Computational StudyDocument12 pagesA Three Dimensional Computational StudyCassella AdrianoNo ratings yet
- Bat Bot (B2), A Biologically Inspired Flying Machine: Alireza Ramezani, Xichen Shi, Soon-Jo Chung, Seth HutchinsonDocument8 pagesBat Bot (B2), A Biologically Inspired Flying Machine: Alireza Ramezani, Xichen Shi, Soon-Jo Chung, Seth HutchinsonPhạm Quốc BảoNo ratings yet
- Force Production and Asymmetric Deformation of A Flexible Flapping Wing in Forward FlightDocument13 pagesForce Production and Asymmetric Deformation of A Flexible Flapping Wing in Forward FlighthaizhouNo ratings yet
- Fbioe 10 795063Document14 pagesFbioe 10 795063Yan Kang TanNo ratings yet
- The Effects of Corrugation and Wing Planform On The Aerodynamic Force Production of Sweeping Model Insect WingsDocument11 pagesThe Effects of Corrugation and Wing Planform On The Aerodynamic Force Production of Sweeping Model Insect WingsAsh SechlerNo ratings yet
- C C C C C C C C C CC CC CCC C CC C C CCC C C C C C C C !" C "#$ C&!"C&C #C&C!$!C$$C '$#C ("C$) $C C C C C C+"C,-.,C CDocument8 pagesC C C C C C C C C CC CC CCC C CC C C CCC C C C C C C C !" C "#$ C&!"C&C #C&C!$!C$$C '$#C ("C$) $C C C C C C+"C,-.,C CmilkllovinNo ratings yet
- From Studying Real Hummingbirds To Designing Hummingbird-Like Robots-A Literature ReviewDocument20 pagesFrom Studying Real Hummingbirds To Designing Hummingbird-Like Robots-A Literature ReviewMSANo ratings yet
- Pof 23 2011Document12 pagesPof 23 2011flowh_No ratings yet
- Short-Amplitude High-Frequency Wing Strokes Determine The Aerodynamics of Honeybee FlightDocument6 pagesShort-Amplitude High-Frequency Wing Strokes Determine The Aerodynamics of Honeybee FlightmanolojethroNo ratings yet
- Socha&LaBarbera 2005 1Document13 pagesSocha&LaBarbera 2005 1far faraNo ratings yet
- A Computational Study of The Aerodynamic Forces and Power Requirements of Dragonfly (Aeschna Juncea) HoveringDocument15 pagesA Computational Study of The Aerodynamic Forces and Power Requirements of Dragonfly (Aeschna Juncea) HoveringThermic_TrioNo ratings yet
- Aerodynamic Effects of Flexibility in Flapping Wings:, Doi: 10.1098/rsif.2009.0200Document14 pagesAerodynamic Effects of Flexibility in Flapping Wings:, Doi: 10.1098/rsif.2009.0200RAJARATNANo ratings yet
- Applied Mathematics and Mechanics (English Edition) : Xinghua CHANG, Laiping ZHANG, Rong MA, Nianhua WANGDocument22 pagesApplied Mathematics and Mechanics (English Edition) : Xinghua CHANG, Laiping ZHANG, Rong MA, Nianhua WANGnextscholappNo ratings yet
- s41598 019 53625 0 PDFDocument13 pagess41598 019 53625 0 PDFMuhammad Faiz BaihaqiNo ratings yet
- Numerical Study of The Unsteady Aerodynamics of Rotating SeedsDocument6 pagesNumerical Study of The Unsteady Aerodynamics of Rotating SeedsademargcjuniorNo ratings yet
- Dickinson KinematicsDocument21 pagesDickinson Kinematicsm22me052No ratings yet
- Ijertv6n5spl 01Document12 pagesIjertv6n5spl 01Mohammed SalamNo ratings yet
- Effect of Different Design Parameters On Lift, Thrust and Drag of An OrnithopterDocument6 pagesEffect of Different Design Parameters On Lift, Thrust and Drag of An Ornithopteropenid_AePkLAJcNo ratings yet
- 553 Full PDFDocument11 pages553 Full PDFJuan David Quintero MonsalveNo ratings yet
- Aerodynamic Studies of Dragonfly Flight ModesDocument20 pagesAerodynamic Studies of Dragonfly Flight ModesDR. RockyNo ratings yet
- 2023 06 29 547116v3 FullDocument59 pages2023 06 29 547116v3 FullMIGUEL ANGEL VICENTE CANAVIRINo ratings yet
- Aerodynamics of Bird and Insect Flight PDFDocument13 pagesAerodynamics of Bird and Insect Flight PDFDayasagar VSNo ratings yet
- Aerodynamic Performance of Feathered Dinosaur MicroraptorDocument9 pagesAerodynamic Performance of Feathered Dinosaur Microraptorcallisto69No ratings yet
- A Reconfigurable Wing For Biomimetic AircraftDocument12 pagesA Reconfigurable Wing For Biomimetic AircraftMoses DevaprasannaNo ratings yet
- Thin AirDocument8 pagesThin AirNeetu SharmaNo ratings yet
- Aerodynamic Benefits of Bristled Wings during Clap and Fling at Low Reynolds NumbersDocument39 pagesAerodynamic Benefits of Bristled Wings during Clap and Fling at Low Reynolds NumbersVishwa TejaNo ratings yet
- Four-Bar Linkage Mechanism For Insectlike Flapping Wings in Hover: Concept and An Outline of Its RealizationDocument8 pagesFour-Bar Linkage Mechanism For Insectlike Flapping Wings in Hover: Concept and An Outline of Its RealizationHosein PahlavanNo ratings yet
- Velez 2013Document14 pagesVelez 2013jucasegaNo ratings yet
- Aerodynamic Performance of A Free-Flying DragonflyDocument18 pagesAerodynamic Performance of A Free-Flying DragonflyDR. RockyNo ratings yet
- Pitching Moment Generation in An Insect-Mimicking Flapping-Wing SystemDocument16 pagesPitching Moment Generation in An Insect-Mimicking Flapping-Wing SystemRAJARATNANo ratings yet
- Cheng 2021Document13 pagesCheng 2021Karen GarzónNo ratings yet
- Performance Characteristics of A 1 KW Scale Kite-Powered SystemDocument11 pagesPerformance Characteristics of A 1 KW Scale Kite-Powered Systemaravind_1014No ratings yet
- Numerical Study On The Hydrodynamics of Thunniform Bio-Inspired Swimming Under Self-PropulsionDocument36 pagesNumerical Study On The Hydrodynamics of Thunniform Bio-Inspired Swimming Under Self-PropulsionMoises LopesNo ratings yet
- Quasi-Steady State Aerodynamics of The Cheetah TailDocument10 pagesQuasi-Steady State Aerodynamics of The Cheetah TailaaaaNo ratings yet
- MiklosovicDocument5 pagesMiklosovicRNo ratings yet
- Wing Shape and Ight Behaviour in Butter Ies (Lepidoptera: Papilionoidea and Hesperioidea) : A Preliminary AnalysisDocument19 pagesWing Shape and Ight Behaviour in Butter Ies (Lepidoptera: Papilionoidea and Hesperioidea) : A Preliminary AnalysisAkshay bypNo ratings yet
- Are Anime Titties AerodynamicDocument14 pagesAre Anime Titties AerodynamicDimitris F100% (4)
- Longitudinal Flight Dynamic Analysis On Vertical Takeoff of A Tailless Flapping-Wing Micro Air VehicleDocument15 pagesLongitudinal Flight Dynamic Analysis On Vertical Takeoff of A Tailless Flapping-Wing Micro Air Vehiclechandra sekharNo ratings yet
- KF FSI Exergy FlexibleFoilDocument22 pagesKF FSI Exergy FlexibleFoilKamran FouladiNo ratings yet
- On The Best Design For Undulatory Swimming: Christophe EloyDocument41 pagesOn The Best Design For Undulatory Swimming: Christophe EloyZuo CuiNo ratings yet
- PHP CA74Document6 pagesPHP CA74krishnan1159No ratings yet
- Aerodynamics of Dynamic Wing Flexion in Translating Wings: Yun Liu Bo Cheng Sanjay P. Sane Xinyan DengDocument15 pagesAerodynamics of Dynamic Wing Flexion in Translating Wings: Yun Liu Bo Cheng Sanjay P. Sane Xinyan DengRAJARATNANo ratings yet
- Direct numerical simulation of particle detachmentDocument14 pagesDirect numerical simulation of particle detachmentAntonio Martín AlcántaraNo ratings yet
- Python For Data ScienceDocument321 pagesPython For Data ScienceAntonio Martín AlcántaraNo ratings yet
- Python For Data ScienceDocument321 pagesPython For Data ScienceAntonio Martín AlcántaraNo ratings yet
- Bruce K. Driver - Lecture Notes - Topology and Functional AnalysisDocument91 pagesBruce K. Driver - Lecture Notes - Topology and Functional AnalysisAndrey FerreiraNo ratings yet
- Kim JCP 2001Document19 pagesKim JCP 2001Antonio Martín AlcántaraNo ratings yet
- Python Data Science Cheat SheetDocument1 pagePython Data Science Cheat SheetMaisarah Mohd PauziNo ratings yet
- Saadat Et Al PRF 2017Document12 pagesSaadat Et Al PRF 2017Antonio Martín AlcántaraNo ratings yet
- Euler and Navier Stokes Inverse Problem Studies of Airfoil by Genetic AlgorithmDocument7 pagesEuler and Navier Stokes Inverse Problem Studies of Airfoil by Genetic AlgorithmAntonio Martín AlcántaraNo ratings yet
- Diaz 2008Document17 pagesDiaz 2008Antonio Martín AlcántaraNo ratings yet
- Ofw8 Combest Advshm FinalDocument110 pagesOfw8 Combest Advshm FinalAntonio Martín AlcántaraNo ratings yet
- DynamicTetRemeshing OFW6 PresentationDocument26 pagesDynamicTetRemeshing OFW6 PresentationAntonio Martín AlcántaraNo ratings yet
- Azuma JTheoBiol 1987Document12 pagesAzuma JTheoBiol 1987Antonio Martín AlcántaraNo ratings yet
- Active Vorticity Control in A Shear Flow Using A Flapping FoilDocument21 pagesActive Vorticity Control in A Shear Flow Using A Flapping FoilAntonio Martín AlcántaraNo ratings yet
- 1 s2.0 S0889974613000388 MainDocument24 pages1 s2.0 S0889974613000388 MainAntonio Martín AlcántaraNo ratings yet
- 001 - Openfoam SSÇ ÀÚ ÁDocument189 pages001 - Openfoam SSÇ ÀÚ ÁAntonio Martín AlcántaraNo ratings yet
- PDFDocument28 pagesPDFAntonio Martín AlcántaraNo ratings yet
- Appendix A Complex NumbersDocument3 pagesAppendix A Complex NumbersAntonio Martín AlcántaraNo ratings yet
- Stojkovic PoF 2003Document5 pagesStojkovic PoF 2003Antonio Martín AlcántaraNo ratings yet
- BosDocument236 pagesBosmahzadkhNo ratings yet
- Thrust and Efficiency of Propulsion by Oscillating FoilsDocument6 pagesThrust and Efficiency of Propulsion by Oscillating FoilsAntonio Martín AlcántaraNo ratings yet
- J Exp Biol 2001 SaneDocument21 pagesJ Exp Biol 2001 SaneAntonio Martín AlcántaraNo ratings yet
- Calderon PF 2014Document16 pagesCalderon PF 2014Antonio Martín AlcántaraNo ratings yet
- Naca Report 567Document9 pagesNaca Report 567Antonio Martín AlcántaraNo ratings yet
- 1 s2.0 S0045794906003865 Main PDFDocument7 pages1 s2.0 S0045794906003865 Main PDFAntonio Martín AlcántaraNo ratings yet
- Guilmineau JFS 2002 PDFDocument22 pagesGuilmineau JFS 2002 PDFAntonio Martín AlcántaraNo ratings yet
- 2010 - Laminar Flow Past An Oscillating Circular Cylinder in Cross FlowDocument8 pages2010 - Laminar Flow Past An Oscillating Circular Cylinder in Cross FlowheloverNo ratings yet
- Meshing Tools For Open Source CFD - A Practical Point of ViewDocument25 pagesMeshing Tools For Open Source CFD - A Practical Point of Viewbardock277100% (1)
- J Exp Biol-1973-WEIS-FOGH-169-230 PDFDocument62 pagesJ Exp Biol-1973-WEIS-FOGH-169-230 PDFAntonio Martín AlcántaraNo ratings yet
- A Study of Two-Dimensional Flow Past An Oscillating CylinderDocument32 pagesA Study of Two-Dimensional Flow Past An Oscillating CylinderAntonio Martín AlcántaraNo ratings yet
- S0022112099008071a PDFDocument19 pagesS0022112099008071a PDFAntonio Martín AlcántaraNo ratings yet
- Sat PhysicsDocument327 pagesSat PhysicsVenki GovindNo ratings yet
- Governor: Er. Subodh Kumar GhimireDocument13 pagesGovernor: Er. Subodh Kumar GhimireRohit NewarNo ratings yet
- Experimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface ConditionsDocument12 pagesExperimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface Conditionsnoor muhammadNo ratings yet
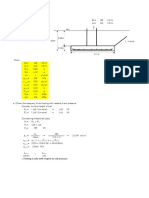
- Wall FootingDocument3 pagesWall FootingFrancis Ko Badongen-Cawi Tabaniag Jr.No ratings yet
- Structural Dynamics Spring Mass SystemDocument57 pagesStructural Dynamics Spring Mass Systemrobliutpg.com.auNo ratings yet
- Shake PDFDocument15 pagesShake PDFGabriel EvanNo ratings yet
- Structural Design Calculations for South Kensington Station RoofDocument30 pagesStructural Design Calculations for South Kensington Station RoofHussein JaberNo ratings yet
- M1 ForcesDocument77 pagesM1 ForcesMusa AamirNo ratings yet
- Progress Report Week#9 UlubeluDocument6 pagesProgress Report Week#9 UlubelutiantaufikNo ratings yet
- Gas pressure drop calculationDocument820 pagesGas pressure drop calculationVu Le NguyenNo ratings yet
- Dougs Thermo 2a Complete Course Work Report FinalDocument23 pagesDougs Thermo 2a Complete Course Work Report Finaldoug2710No ratings yet
- Continuous Casting ThesisDocument256 pagesContinuous Casting ThesisMoreno MarcatiNo ratings yet
- Assignment: Small Signal Stability: Task1Document13 pagesAssignment: Small Signal Stability: Task1Nouman ChoudhryNo ratings yet
- KInatics Theory and Atom and Nuclie MMDocument1 pageKInatics Theory and Atom and Nuclie MMSanjay GuptaNo ratings yet
- MD Module 2 Shaft DesignDocument6 pagesMD Module 2 Shaft DesignCllyan ReyesNo ratings yet
- AGA8Document6 pagesAGA8Bled GegaNo ratings yet
- 18 Engineering Reference - Motor Selection and Sizing PDFDocument5 pages18 Engineering Reference - Motor Selection and Sizing PDFSamik MukherjeeNo ratings yet
- Mechanical systems examples thermal hydraulic pneumaticDocument8 pagesMechanical systems examples thermal hydraulic pneumaticAbdulrahmanNo ratings yet
- Motion GraphDocument2 pagesMotion GraphAnan BarghouthyNo ratings yet
- Problem A1 Study of Bernoulli'S Theorem I. AbstractDocument9 pagesProblem A1 Study of Bernoulli'S Theorem I. AbstractpjrapanutNo ratings yet
- 52-Forced Convection - Bank of Tubes (With Numericals) - 13-Sep-2019Material - I - 13-Sep-2019 - Bank - of - Tubes PDFDocument7 pages52-Forced Convection - Bank of Tubes (With Numericals) - 13-Sep-2019Material - I - 13-Sep-2019 - Bank - of - Tubes PDFsiva yandraNo ratings yet
- AISC-360-05 Example 001 PDFDocument8 pagesAISC-360-05 Example 001 PDFMohamed Abo-ZaidNo ratings yet
- Understand Contacts - Midas NFX PDFDocument10 pagesUnderstand Contacts - Midas NFX PDFdzejziNo ratings yet
- Tos First Periodical Test in Grade 8Document27 pagesTos First Periodical Test in Grade 8Rowena Sta MariaNo ratings yet
- E201: Work, Energy, and Power ExperimentsDocument2 pagesE201: Work, Energy, and Power ExperimentsJasmin DionisioNo ratings yet
- 1 - ForceDocument42 pages1 - ForceJessa YaunNo ratings yet
- Free Board Calc For Wet Crude TankDocument1 pageFree Board Calc For Wet Crude TankSubramanianNo ratings yet
- Phy231sp06 Exam3 PracticeDocument8 pagesPhy231sp06 Exam3 PracticeJunsuk AhnNo ratings yet
- Solutions at Axis of SymmetryDocument48 pagesSolutions at Axis of SymmetryAhmedMahirNo ratings yet