You might also like
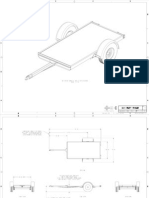
- 4x8 Utility Trailer Assembly Drawings and DiagramsDocument18 pages4x8 Utility Trailer Assembly Drawings and Diagramscualete100% (1)
- MIT18 06S10 Final AnswersDocument14 pagesMIT18 06S10 Final AnswersandreaskailinaNo ratings yet
- A Guide To Building Outdoor StairsDocument5 pagesA Guide To Building Outdoor StairssurfsandNo ratings yet
- Assignment 1Document2 pagesAssignment 1Danny FungNo ratings yet
- M07 Handout - Functions of Several VariablesDocument7 pagesM07 Handout - Functions of Several VariablesKatherine SauerNo ratings yet
- Wines - Henri FluchereDocument164 pagesWines - Henri FluchereKenneth86% (7)
- Circle Exercise For 12Document7 pagesCircle Exercise For 12Jibran SiddiquiNo ratings yet
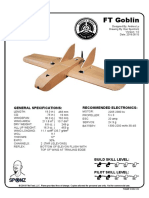
- FT Goblin Full SizeDocument7 pagesFT Goblin Full SizeDeakon Frost100% (1)
- CSEC IT Fundamentals of Hardware and SoftwareDocument2 pagesCSEC IT Fundamentals of Hardware and SoftwareR.D. Khan100% (1)
- How To Design Concrete Structures Using Eurocode 2Document104 pagesHow To Design Concrete Structures Using Eurocode 2Adil Javed Chaudhary97% (36)
- STA 121 - Introduction to Probability Course OverviewDocument10 pagesSTA 121 - Introduction to Probability Course OverviewAbraham BanjoNo ratings yet
- Complex AlgebraDocument8 pagesComplex Algebramahek19579328100% (1)
- Vector CalculusDocument108 pagesVector CalculusHani Barjok100% (1)
- From Structural Analysis To Finite Element MethodDocument25 pagesFrom Structural Analysis To Finite Element MethodB S Praveen BspNo ratings yet
- MECHANICS Kinematics: Chapter 2 - Motion Along A Straight LineDocument11 pagesMECHANICS Kinematics: Chapter 2 - Motion Along A Straight LineDan AltmanNo ratings yet
- Concrete RepairDocument99 pagesConcrete RepairHamid Naveed75% (4)
- CH 08Document41 pagesCH 08Saied Aly SalamahNo ratings yet
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)From EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)No ratings yet
- ITC 215: Data Structure and Algorithm Module ObjectivesDocument3 pagesITC 215: Data Structure and Algorithm Module Objectiveskarthikeyan50700HRNo ratings yet
- Shear Wall Design ReportDocument26 pagesShear Wall Design ReportAli ImranNo ratings yet
- Static Analysis of Timoshenko Beams Using Isogeometric ApproachDocument9 pagesStatic Analysis of Timoshenko Beams Using Isogeometric ApproachcapicaNo ratings yet
- Statics ReviewDocument4 pagesStatics Reviewsamir_ssh7151No ratings yet
- Orthogonal Polynomials Properties and ApplicationsDocument22 pagesOrthogonal Polynomials Properties and ApplicationsAlexandra Nicoleta TeisiNo ratings yet
- Functions Relations and Graphsv2Document9 pagesFunctions Relations and Graphsv2IsuruNo ratings yet
- Multiple Choice Question (MCQ) of Alternator and Synchronous Motors PageDocument29 pagesMultiple Choice Question (MCQ) of Alternator and Synchronous Motors Pagekibrom atsbha0% (1)
- Ata 36 PDFDocument149 pagesAta 36 PDFAyan Acharya100% (2)
- 03 Truncation ErrorsDocument37 pages03 Truncation ErrorsJeff HardyNo ratings yet
- Concrete Crack and Partial-Depth Spall RepairDocument78 pagesConcrete Crack and Partial-Depth Spall RepairRafeeq WazirNo ratings yet
- G10 - Matrix and VectorsDocument11 pagesG10 - Matrix and VectorsEduar RodriguezNo ratings yet
- Linear Dependence and Independence of VectorsDocument17 pagesLinear Dependence and Independence of VectorsR NishanNo ratings yet
- Quezon City Department of The Building OfficialDocument2 pagesQuezon City Department of The Building OfficialBrightNotes86% (7)
- Chapter 3 Regular Expressions NotesDocument36 pagesChapter 3 Regular Expressions NotesEng-Khaled Mohamoud DirieNo ratings yet
- Cubic SplineDocument11 pagesCubic SplineMohamed SadekNo ratings yet
- Lecture Notes: Linear AlgebraDocument9 pagesLecture Notes: Linear Algebrasaqlain abbasNo ratings yet
- Computational Methods in Reinforced ConcreteDocument211 pagesComputational Methods in Reinforced ConcreteAndrei Cioroianu100% (1)
- Measuring unknown resistors using Wheatstone bridgeDocument7 pagesMeasuring unknown resistors using Wheatstone bridgeFarid MalikNo ratings yet
- Nonlinear Ordinary Differential Equations in Transport ProcessesFrom EverandNonlinear Ordinary Differential Equations in Transport ProcessesNo ratings yet
- ContactsDocument10 pagesContactsSana Pewekar0% (1)
- Gaussian QuadratureDocument24 pagesGaussian QuadratureAbera DeressaNo ratings yet
- Teach Yourself Trigonometry - A Complete Introduction (PDFDrive)Document302 pagesTeach Yourself Trigonometry - A Complete Introduction (PDFDrive)Anderson AlfredNo ratings yet
- Intersection of Line and PlaneDocument2 pagesIntersection of Line and PlaneAljon AbriamNo ratings yet
- A Some Basic Rules of Tensor Calculus PDFDocument26 pagesA Some Basic Rules of Tensor Calculus PDFrenatotorresa2905No ratings yet
- Round-off Errors and Computer ArithmeticDocument15 pagesRound-off Errors and Computer Arithmeticسعود يحيىNo ratings yet
- Introduction To VectorsDocument8 pagesIntroduction To VectorsCynthia PlazaNo ratings yet
- Lecture 3 - Vector Operations PDFDocument26 pagesLecture 3 - Vector Operations PDFAyeeSerranoNo ratings yet
- 0987-Numerical Methods in Civil Engineering PDFDocument74 pages0987-Numerical Methods in Civil Engineering PDFyoupick10No ratings yet
- Vector Analysis - Lecture Notes 02 - Vector Equation of Straight LinesDocument10 pagesVector Analysis - Lecture Notes 02 - Vector Equation of Straight LinesZhayree R.No ratings yet
- Equilibrium Statics ProblemsDocument10 pagesEquilibrium Statics ProblemsTheAznNo ratings yet
- Approximations and Round-Off ErrorsDocument10 pagesApproximations and Round-Off ErrorsbadarNo ratings yet
- Unit-2 Shear Force and Bending MomentDocument7 pagesUnit-2 Shear Force and Bending MomentMouli Sankar100% (1)
- Eigenvalue Problems SolvedDocument65 pagesEigenvalue Problems SolvedAngelo RamosNo ratings yet
- Sequence and Series NIT AllahabadDocument84 pagesSequence and Series NIT AllahabadVachaspati Mishra100% (2)
- Chapter 4 Linear MotionDocument42 pagesChapter 4 Linear MotionChidube MekkamNo ratings yet
- Advanced Level Pure Mathematics Chapter 4 DerivativesDocument28 pagesAdvanced Level Pure Mathematics Chapter 4 DerivativesIan ChanNo ratings yet
- Rational FunctionsDocument7 pagesRational Functionsaditya2053No ratings yet
- 18 Introduction To VectorsDocument27 pages18 Introduction To VectorsKenton LamNo ratings yet
- Trigonometry QuestionsDocument2 pagesTrigonometry Questionsitope84No ratings yet
- MAT 1348/1748 SUPPLEMENTAL EXERCISESDocument22 pagesMAT 1348/1748 SUPPLEMENTAL EXERCISESVed PetkarNo ratings yet
- 13.5 Curl and DivergenceDocument11 pages13.5 Curl and DivergenceDaniel Gaytan-JenkinsNo ratings yet
- Assign 3Document2 pagesAssign 3Adarsh Bandi100% (2)
- TensorsDocument46 pagesTensorsfoufou200350% (2)
- Chapter 3 Statically Determinate and Indeterminate Systems: 3.1 Principles of Solid MechanicsDocument17 pagesChapter 3 Statically Determinate and Indeterminate Systems: 3.1 Principles of Solid MechanicsHamza MahmoodNo ratings yet
- Fourier Series Transformation Using MathematicaDocument5 pagesFourier Series Transformation Using MathematicaShashank MishraNo ratings yet
- Problemas de EngranesDocument18 pagesProblemas de EngranesStratowarionNo ratings yet
- HW 03Document54 pagesHW 03alagar krishna kumarNo ratings yet
- Mathematics FormulasDocument2 pagesMathematics FormulasgopalmyneniNo ratings yet
- Stability of Discrete Non-conservative SystemsFrom EverandStability of Discrete Non-conservative SystemsRating: 1 out of 5 stars1/5 (1)
- Handbook of Numerical Methods for the Solution of Algebraic and Transcendental EquationsFrom EverandHandbook of Numerical Methods for the Solution of Algebraic and Transcendental EquationsNo ratings yet
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceFrom EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissNo ratings yet
- Access For Advanced LevelDocument276 pagesAccess For Advanced LeveldaniymhNo ratings yet
- 1 Energetic Stability: Plate Buckling: X, U (X, Y) Y, V (X, Y)Document6 pages1 Energetic Stability: Plate Buckling: X, U (X, Y) Y, V (X, Y)Andrei CioroianuNo ratings yet
- People ManagementDocument2 pagesPeople ManagementAndrei CioroianuNo ratings yet
- Seminar09 FEM CSTDocument6 pagesSeminar09 FEM CSTAndrei CioroianuNo ratings yet
- 1 Recapitulation - Energetic StabilityDocument6 pages1 Recapitulation - Energetic StabilityAndrei CioroianuNo ratings yet
- Master of Body Language PDFDocument10 pagesMaster of Body Language PDFreversoNo ratings yet
- Seminar05 MPEDocument7 pagesSeminar05 MPEAndrei CioroianuNo ratings yet
- People ManagementDocument2 pagesPeople ManagementAndrei CioroianuNo ratings yet
- Seminar02 MPEDocument7 pagesSeminar02 MPEAndrei CioroianuNo ratings yet
- Seminar01 IntroductionDocument8 pagesSeminar01 IntroductionAndrei CioroianuNo ratings yet
- Seminar11 FEM TrussDocument7 pagesSeminar11 FEM TrussAndrei CioroianuNo ratings yet
- Seminar10 FEM CSTDocument6 pagesSeminar10 FEM CSTAndrei CioroianuNo ratings yet
- How To Write A Good CVDocument5 pagesHow To Write A Good CVAndrei CioroianuNo ratings yet
- Seminar04 MPEDocument7 pagesSeminar04 MPEAndrei CioroianuNo ratings yet
- How To Write A Good CVDocument5 pagesHow To Write A Good CVAndrei CioroianuNo ratings yet
- Seminar06 EnergeticStabilityDocument6 pagesSeminar06 EnergeticStabilityAndrei CioroianuNo ratings yet
- Seminar03 MPE TrussDocument6 pagesSeminar03 MPE TrussAndrei CioroianuNo ratings yet
- How To Write A Good CVDocument5 pagesHow To Write A Good CVAndrei CioroianuNo ratings yet
- Module 5Document10 pagesModule 5kero keropiNo ratings yet
- Miniature Circuit Breaker - Acti9 Ic60 - A9F54110Document2 pagesMiniature Circuit Breaker - Acti9 Ic60 - A9F54110Gokul VenugopalNo ratings yet
- CTS experiments comparisonDocument2 pagesCTS experiments comparisonmanojkumarNo ratings yet
- Chapter 1: The Investment Environment: Problem SetsDocument5 pagesChapter 1: The Investment Environment: Problem SetsGrant LiNo ratings yet
- Circular 09/2014 (ISM) : SubjectDocument7 pagesCircular 09/2014 (ISM) : SubjectDenise AhrendNo ratings yet
- Server LogDocument5 pagesServer LogVlad CiubotariuNo ratings yet
- Piping ForemanDocument3 pagesPiping ForemanManoj MissileNo ratings yet
- 6vortex 20166523361966663Document4 pages6vortex 20166523361966663Mieczysław MichalczewskiNo ratings yet
- Sample Property Management AgreementDocument13 pagesSample Property Management AgreementSarah TNo ratings yet
- Resume Ajeet KumarDocument2 pagesResume Ajeet KumarEr Suraj KumarNo ratings yet
- BS EN 364-1993 (Testing Methods For Protective Equipment AgaiDocument21 pagesBS EN 364-1993 (Testing Methods For Protective Equipment AgaiSakib AyubNo ratings yet
- De Thi Chuyen Hai Duong 2014 2015 Tieng AnhDocument4 pagesDe Thi Chuyen Hai Duong 2014 2015 Tieng AnhHuong NguyenNo ratings yet
- Law of TortsDocument22 pagesLaw of TortsRadha KrishanNo ratings yet
- Max 761 CsaDocument12 pagesMax 761 CsabmhoangtmaNo ratings yet
- Ebook The Managers Guide To Effective Feedback by ImpraiseDocument30 pagesEbook The Managers Guide To Effective Feedback by ImpraiseDebarkaChakrabortyNo ratings yet
- Craft's Folder StructureDocument2 pagesCraft's Folder StructureWowNo ratings yet
- 5.0 A Throttle Control H-BridgeDocument26 pages5.0 A Throttle Control H-Bridgerumellemur59No ratings yet
- Ralf Behrens: About The ArtistDocument3 pagesRalf Behrens: About The ArtistStavros DemosthenousNo ratings yet
- Case Analysis - Compania de Telefonos de ChileDocument4 pagesCase Analysis - Compania de Telefonos de ChileSubrata BasakNo ratings yet
- Milwaukee 4203 838a PB CatalogaciónDocument2 pagesMilwaukee 4203 838a PB CatalogaciónJuan carlosNo ratings yet
- WELDING EQUIPMENT CALIBRATION STATUSDocument4 pagesWELDING EQUIPMENT CALIBRATION STATUSAMIT SHAHNo ratings yet
- Discursive Closure and Discursive Openings in SustainabilityDocument10 pagesDiscursive Closure and Discursive Openings in SustainabilityRenn MNo ratings yet
- BRD TemplateDocument4 pagesBRD TemplateTrang Nguyen0% (1)
- CCS PDFDocument2 pagesCCS PDFАндрей НадточийNo ratings yet