You might also like
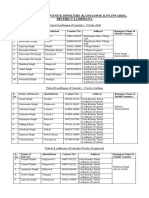
- Ludhiana Revenue Officers Contact DetailsDocument15 pagesLudhiana Revenue Officers Contact Detailsramyadav0056% (18)
- CSAT 2015 Orientation P1 GSDocument112 pagesCSAT 2015 Orientation P1 GSramyadav00No ratings yet
- Generate PDF Certificate for Ideal Institute of TechnologyDocument1 pageGenerate PDF Certificate for Ideal Institute of Technologyramyadav00No ratings yet
- E Technology in The Aid of FarmersDocument9 pagesE Technology in The Aid of Farmerssalmanabu25No ratings yet
- Civil Services News January PDFDocument182 pagesCivil Services News January PDFvipul100% (1)
- Insights-On-India Prelims Test Series - 2015 ScheduleDocument4 pagesInsights-On-India Prelims Test Series - 2015 ScheduletriloksinghmeenaNo ratings yet
- Table - List of State Codes Sr. No State Name State CodeDocument15 pagesTable - List of State Codes Sr. No State Name State Coderamyadav00No ratings yet
- Ras Paper 19 11 2013Document64 pagesRas Paper 19 11 2013targetcse13No ratings yet
- Professional Qualification::) : R.B.S.E. Ajmer, 85.5 (Year-2003)Document2 pagesProfessional Qualification::) : R.B.S.E. Ajmer, 85.5 (Year-2003)ramyadav00No ratings yet
- Chap 4Document26 pagesChap 4Dinesh KurubaNo ratings yet
- Project 4 - Audio Spectrum AnalyzerDocument5 pagesProject 4 - Audio Spectrum Analyzerramyadav00No ratings yet
- Representation To SSC For Equalization of Marks For DhiruDocument1 pageRepresentation To SSC For Equalization of Marks For Dhiruramyadav00No ratings yet
- 34 38 PDFDocument5 pages34 38 PDFramyadav00No ratings yet
- History NcertDocument15 pagesHistory Ncertramyadav00No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Pioneer Deh 1450ubDocument61 pagesPioneer Deh 1450ubluchoprado33% (3)
- Analysis of Cylinder in AnsysDocument14 pagesAnalysis of Cylinder in AnsysSrinivas NadellaNo ratings yet
- ABB ROBOT Training IRC5 Hardware PDFDocument97 pagesABB ROBOT Training IRC5 Hardware PDFTensaigaNo ratings yet
- V Flower Vocaloid Wiki FandomDocument1 pageV Flower Vocaloid Wiki FandomFlower chanNo ratings yet
- Surbhi Sharma: at HCL Pvt. LTDDocument1 pageSurbhi Sharma: at HCL Pvt. LTDJaskiran KaurNo ratings yet
- Pressure Calibrators: Low, Medium and High PressureDocument2 pagesPressure Calibrators: Low, Medium and High PressureMarcelo PellizzaNo ratings yet
- Script (English)Document7 pagesScript (English)Jona Mae CamachoNo ratings yet
- AQA Physics A-Level Electricity Questions (Pack 3)Document90 pagesAQA Physics A-Level Electricity Questions (Pack 3)BDNo ratings yet
- Churn Consultancy For V Case SharingDocument13 pagesChurn Consultancy For V Case SharingObeid AllahNo ratings yet
- TopSURV 7 3 Release NotesDocument55 pagesTopSURV 7 3 Release NotesChilo PerezNo ratings yet
- Cut Over Activities - Plant Maintenance - SAP Easy Access - SAP BlogsDocument7 pagesCut Over Activities - Plant Maintenance - SAP Easy Access - SAP BlogsOmprakashNo ratings yet
- C Pointers Questions PDFDocument30 pagesC Pointers Questions PDFRoshni Khurana0% (2)
- PDFlib TutorialDocument258 pagesPDFlib TutorialGasNo ratings yet
- DVD615 PDFDocument228 pagesDVD615 PDFFreddy FerrerNo ratings yet
- ISTQB Foundation Exam Format andDocument17 pagesISTQB Foundation Exam Format andapi-3806986No ratings yet
- Artificial Intelligence Adversarial Search TechniquesDocument62 pagesArtificial Intelligence Adversarial Search TechniquesKhawir MahmoodNo ratings yet
- Assignment 2Document2 pagesAssignment 2ni60No ratings yet
- Date Sheet (MST-I)Document12 pagesDate Sheet (MST-I)Tauqeer AhmadNo ratings yet
- Image Classification With The MNIST Dataset: ObjectivesDocument21 pagesImage Classification With The MNIST Dataset: ObjectivesPraveen SinghNo ratings yet
- 3 Process Fundamentals Chapter 2 and 3Document74 pages3 Process Fundamentals Chapter 2 and 3Terry Conrad KingNo ratings yet
- Teams HandbookDocument18 pagesTeams HandbookLudi D. LunarNo ratings yet
- Compressed SensingDocument14 pagesCompressed Sensingnigel989No ratings yet
- International Technology Roadmap For Semiconductors: 2008 Itrs OrtcDocument23 pagesInternational Technology Roadmap For Semiconductors: 2008 Itrs Ortcvishal garadNo ratings yet
- 2010 PAARL Standards For Academic LibrariesDocument6 pages2010 PAARL Standards For Academic LibrariesChristian Robert NalicaNo ratings yet
- GR00005200D 13a PDFDocument187 pagesGR00005200D 13a PDFbitadminaccNo ratings yet
- Saurabh CV FormatDocument3 pagesSaurabh CV FormatJane MooreNo ratings yet
- Water Specialist WS2H and WS3 Control Valve ManualDocument40 pagesWater Specialist WS2H and WS3 Control Valve ManualjnpaisNo ratings yet
- Jean Abreu CVDocument3 pagesJean Abreu CVABREUNo ratings yet
- EMC ScaleIO Performance ReportsDocument18 pagesEMC ScaleIO Performance Reportsdavid0young_2No ratings yet
- Distributed Object System: Java - Remote Method Invocation (RMI) Remote Method Invocation (RMI)Document22 pagesDistributed Object System: Java - Remote Method Invocation (RMI) Remote Method Invocation (RMI)endaleNo ratings yet