You might also like
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- 2.004 Dynamics and Control Ii: Mit OpencoursewareDocument7 pages2.004 Dynamics and Control Ii: Mit OpencoursewareVishay RainaNo ratings yet
- Lab 2: Quanser Hardware and Proportional Control: I. ObjectiveDocument7 pagesLab 2: Quanser Hardware and Proportional Control: I. ObjectiveAndré LeopoldinoNo ratings yet
- PI Controller Design for DC MotorDocument4 pagesPI Controller Design for DC MotorsamielmadssiaNo ratings yet
- ET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019Document4 pagesET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019essameldinNo ratings yet
- Motor Control Lab ReportDocument4 pagesMotor Control Lab ReportVu LeNo ratings yet
- Design Neural Network Predictive Controller in SimulinkDocument9 pagesDesign Neural Network Predictive Controller in Simulinkrakheep123No ratings yet
- Lab-DC Motor ControlDocument5 pagesLab-DC Motor Controlahmed3423No ratings yet
- 10 Tips For Successful Scan Design Part OneDocument6 pages10 Tips For Successful Scan Design Part Onebesha1987No ratings yet
- Lab Report Rotary CompleteDocument22 pagesLab Report Rotary CompleteSyed Farid100% (1)
- Simu OptimDocument5 pagesSimu OptimKalaichelvi KarthikeyanNo ratings yet
- Cycle1 ManualDocument24 pagesCycle1 ManualSanthosh krishna. UNo ratings yet
- To DC sJBJirDocument11 pagesTo DC sJBJirprakashNo ratings yet
- Lab2 UpdatedDocument5 pagesLab2 UpdatedSekar PrasetyaNo ratings yet
- Lock Up Latch in VLSIDocument8 pagesLock Up Latch in VLSIsandy_711100% (1)
- Simulink4Controlnew2008 1pageDocument12 pagesSimulink4Controlnew2008 1pageBambang Hidayat NoegrohoNo ratings yet
- Laboratory ManualDocument26 pagesLaboratory ManualahmadNo ratings yet
- EE 461 Experiment #1 Digital Control of DC Servomotor: 1 ObjectivesDocument5 pagesEE 461 Experiment #1 Digital Control of DC Servomotor: 1 ObjectivesTancho IndraNo ratings yet
- 1 Simulink For Process ControlDocument10 pages1 Simulink For Process Controlehsilv005No ratings yet
- Driven Mass-Spring System with Damping LabDocument24 pagesDriven Mass-Spring System with Damping LabAhmed H HusseinNo ratings yet
- SimulinkDocument41 pagesSimulinkdpksobsNo ratings yet
- CSE Journal (304111 TY-1)Document53 pagesCSE Journal (304111 TY-1)Akash BNo ratings yet
- Control Systems Lab (SC4070) : Laboratory SessionsDocument2 pagesControl Systems Lab (SC4070) : Laboratory Sessionsrakheep123No ratings yet
- EE4314Lab 2 Fall2013Document7 pagesEE4314Lab 2 Fall2013Edú CárdenasNo ratings yet
- Lab 3: Motor Cart Control - Closed Loop PositioningDocument6 pagesLab 3: Motor Cart Control - Closed Loop PositioningAnudeepReddyNo ratings yet
- MCH3008 Lab ProjectDocument4 pagesMCH3008 Lab ProjectEJAZ AHMADNo ratings yet
- Experiments - RC Circuit Sheet PDFDocument5 pagesExperiments - RC Circuit Sheet PDFĂkŕăm LôKâNo ratings yet
- Three Degree of Freedom Lab-1Document4 pagesThree Degree of Freedom Lab-1victorigamiNo ratings yet
- ECE486 Lab ManualDocument106 pagesECE486 Lab ManualDR ARINDAM SENNo ratings yet
- Modeling Electrical NetworksDocument10 pagesModeling Electrical NetworksmbmonvilleNo ratings yet
- Analog SimulationDocument9 pagesAnalog SimulationMotaz Ahmad AmeenNo ratings yet
- Lab OpenLoopResponse1023072Document7 pagesLab OpenLoopResponse1023072Goran MiljkovicNo ratings yet
- Informe Lab - 6y7-Diseño - PIDDocument6 pagesInforme Lab - 6y7-Diseño - PIDMiguel Angel Mamani MejiaNo ratings yet
- Proportional and Derivative Control DesignDocument5 pagesProportional and Derivative Control Designahmed shahNo ratings yet
- Lab 3 - HandoutDocument7 pagesLab 3 - HandoutohmprakashNo ratings yet
- Ece305 PDFDocument24 pagesEce305 PDFmrityunjay jhaNo ratings yet
- Simulink Dfig Lab - 061114Document8 pagesSimulink Dfig Lab - 061114Fer AguvegNo ratings yet
- Signals and Systems - Project Notes - Autumn 2012Document37 pagesSignals and Systems - Project Notes - Autumn 2012Min Khine KyawNo ratings yet
- DC Motor System - Open LoopDocument22 pagesDC Motor System - Open LoopSivesh SinghNo ratings yet
- Part 1 - FSM DesignDocument3 pagesPart 1 - FSM DesignMENANI ZineddineNo ratings yet
- MATSIM Simulink For Process ControlDocument10 pagesMATSIM Simulink For Process ControlEslamAbdEl-GhanyNo ratings yet
- ECE 5570 - Lab 2 PID Control of A Brush DC Motor ObjectivesDocument5 pagesECE 5570 - Lab 2 PID Control of A Brush DC Motor ObjectivesAnimesh GhoshNo ratings yet
- R - H I T: Lab 1 Introduction To First Order Circuits Using Multisim, Matlab and Simulink ObjectiveDocument136 pagesR - H I T: Lab 1 Introduction To First Order Circuits Using Multisim, Matlab and Simulink ObjectiveGeorge BrownNo ratings yet
- ELEC4632 Lab 4: Real-Time Implementation of Output Feedback Control System For Set-Point ControlDocument4 pagesELEC4632 Lab 4: Real-Time Implementation of Output Feedback Control System For Set-Point ControlZIYI PANNo ratings yet
- Experiment No. 01 Introduction To System Representation and Observation Using MATLABDocument20 pagesExperiment No. 01 Introduction To System Representation and Observation Using MATLABRakayet RafiNo ratings yet
- Lab3 r1Document2 pagesLab3 r1Anteneh AmsaluNo ratings yet
- Lab V - PDFDocument4 pagesLab V - PDFZakNo ratings yet
- (Notes) DESIGN FOR TESTABILITYDocument34 pages(Notes) DESIGN FOR TESTABILITYsarathkumarNo ratings yet
- Quick User Guide 1.5Document55 pagesQuick User Guide 1.5Chu Sun WongNo ratings yet
- Systems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversDocument6 pagesSystems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversColinSimNo ratings yet
- Mfa Merit Exercises 5 Simulink 5174 2Document8 pagesMfa Merit Exercises 5 Simulink 5174 2JamesNo ratings yet
- M S A Math Model of SystemsDocument25 pagesM S A Math Model of SystemsBomezzZ EnterprisesNo ratings yet
- CSE Lab Manual Final 2019-20 P-IDocument42 pagesCSE Lab Manual Final 2019-20 P-IJerry boyNo ratings yet
- Scilab Ninja: Module 6: Discrete-Time Control SystemsDocument8 pagesScilab Ninja: Module 6: Discrete-Time Control Systemsorg25grNo ratings yet
- Experiment # 3 Amplitude Modulation and Demodulation: 1 PurposeDocument9 pagesExperiment # 3 Amplitude Modulation and Demodulation: 1 PurposeGeorgeNo ratings yet
- Lab 6Document7 pagesLab 6Koteswara Rao VaddempudiNo ratings yet
- Work Shop (23 HLM)Document23 pagesWork Shop (23 HLM)ferdhian RahmansyahNo ratings yet
- Scilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaDocument8 pagesScilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaWendell Kim LlanetaNo ratings yet
- Electronic Systems: Study Topics in Physics Book 8From EverandElectronic Systems: Study Topics in Physics Book 8Rating: 5 out of 5 stars5/5 (1)
- XRY-1A Oxygen Bomb CalorimeterDocument16 pagesXRY-1A Oxygen Bomb CalorimeterFrank.J83% (6)
- Question Bank-EE 401 Type 1 - Multiple Choice Questions: Page 1 of 13Document43 pagesQuestion Bank-EE 401 Type 1 - Multiple Choice Questions: Page 1 of 13Rishabh KaliaNo ratings yet
- UnifacDocument3 pagesUnifacapi-294011342No ratings yet
- Universal Dataset Number 58Document17 pagesUniversal Dataset Number 58Palazzo345No ratings yet
- Project (Exergy Analysis of Steam Power Plant)Document76 pagesProject (Exergy Analysis of Steam Power Plant)Shashi Bhushan Patel88% (8)
- Answers To EOC Questions: Cambridge International A Level PhysicsDocument2 pagesAnswers To EOC Questions: Cambridge International A Level PhysicsDuy TôNo ratings yet
- SEMIKRON DataSheet SKKE 15 07170871 PDFDocument4 pagesSEMIKRON DataSheet SKKE 15 07170871 PDFVinicius Veiverberg DillNo ratings yet
- Applied Physics LabDocument59 pagesApplied Physics LabEngr Waqas MalikNo ratings yet
- Sample Number Notes Atmospheric Pressure Patmos (Kpa) Fan Setting S (%) Fan Speed N (RPM) Air Temperature T (°C)Document3 pagesSample Number Notes Atmospheric Pressure Patmos (Kpa) Fan Setting S (%) Fan Speed N (RPM) Air Temperature T (°C)Umair MaqboolNo ratings yet
- Wave Forces On Vertical CylinderDocument22 pagesWave Forces On Vertical CylinderInayatul LailiyahNo ratings yet
- Semianalytical Productivity Models For Perforated CompletionsDocument10 pagesSemianalytical Productivity Models For Perforated CompletionsPhước LêNo ratings yet
- ArmatureDocument3 pagesArmatureJORDAN FREENo ratings yet
- ECH148 UC DavisDocument5 pagesECH148 UC DavisKaul PatrickNo ratings yet
- Ce6306 QBDocument9 pagesCe6306 QBAbhishek KumbalurNo ratings yet
- Inertia FormulasDocument4 pagesInertia FormulasLoysa Agtarap MataNo ratings yet
- Fluent ExerciseDocument44 pagesFluent ExerciseDesign guruNo ratings yet
- TUTORIAL Settling - 20172018 PDFDocument15 pagesTUTORIAL Settling - 20172018 PDFHomesick TutorsNo ratings yet
- The Effect of Temperature On The Elasticity of A Rubber BandDocument11 pagesThe Effect of Temperature On The Elasticity of A Rubber BandThiagarajan BaluNo ratings yet
- Physics 10 Reviewer Question SheetDocument5 pagesPhysics 10 Reviewer Question SheetAntonette TabilNo ratings yet
- Rectilinear and rotational kinematics problemsDocument5 pagesRectilinear and rotational kinematics problemsAljay Dungao40% (5)
- Ebook Chemistry An Atoms First Approach 2Nd Edition Zumdahl Solutions Manual Full Chapter PDFDocument62 pagesEbook Chemistry An Atoms First Approach 2Nd Edition Zumdahl Solutions Manual Full Chapter PDFthuygladys5x0100% (12)
- Wind LoadDocument6 pagesWind LoadRajasekar Meghanadh0% (1)
- Chapter 1-Electric FieldDocument33 pagesChapter 1-Electric FieldThông LêNo ratings yet
- Photoluminescence and Photocatalytic Activity of Spin Coated Ag+ Doped Anatase TiO2 Thin FilmsDocument14 pagesPhotoluminescence and Photocatalytic Activity of Spin Coated Ag+ Doped Anatase TiO2 Thin FilmsJasielRuizDesalesNo ratings yet
- 10 Aberration Theory Part IDocument42 pages10 Aberration Theory Part IxbNo ratings yet
- Signals, Continuous Time and Discrete TimeDocument27 pagesSignals, Continuous Time and Discrete TimeSukanta ParidaNo ratings yet
- Narayana 23-06-2022 Outgoing SR Jee Main Model GTM 18 QP FinalDocument17 pagesNarayana 23-06-2022 Outgoing SR Jee Main Model GTM 18 QP FinalShreyas VedantiNo ratings yet
- TE-2008-Chemical Pang Halimaw Na Exam Ang Hirap NG TanongSDocument40 pagesTE-2008-Chemical Pang Halimaw Na Exam Ang Hirap NG TanongSRomevie PradoNo ratings yet
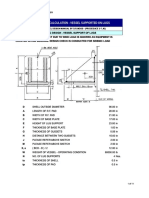
- Vessel seismic design calculationDocument11 pagesVessel seismic design calculationinnovativekarthiNo ratings yet