You might also like
- STC SA00343BO - August 2022Document4 pagesSTC SA00343BO - August 2022EjamesNo ratings yet
- Unit Assessment Plan Grade 6 Topic A Air and Aerodynamics Carrie Harbidge Cardston Elementary March 16, 2011 To April 20, 2011 ED 3604Document12 pagesUnit Assessment Plan Grade 6 Topic A Air and Aerodynamics Carrie Harbidge Cardston Elementary March 16, 2011 To April 20, 2011 ED 3604Anonymous uFTCHpai4hNo ratings yet
- Chapter 9 Surface Resistance and Boundary Layer FlowDocument22 pagesChapter 9 Surface Resistance and Boundary Layer Flowteknikpembakaran2013No ratings yet
- Molecular Dynamics Simulations of Fluid Flow Boundary ConditionsDocument22 pagesMolecular Dynamics Simulations of Fluid Flow Boundary ConditionsArushi JainNo ratings yet
- Chap 4 Sec2 PDFDocument15 pagesChap 4 Sec2 PDFteknikpembakaran2013No ratings yet
- Fluid MechanicsDocument35 pagesFluid MechanicsThabang MaphakisaNo ratings yet
- 57:020 Mechanics of Fluids and Transport Processes Chapter 3 Professor Fred Stern Typed by Stephanie Schrader Fall 1999Document15 pages57:020 Mechanics of Fluids and Transport Processes Chapter 3 Professor Fred Stern Typed by Stephanie Schrader Fall 1999teknikpembakaran2013No ratings yet
- Chapter 6 PDFDocument18 pagesChapter 6 PDFteknikpembakaran2013No ratings yet
- Chapter 2: Pressure and Fluid StaticsDocument40 pagesChapter 2: Pressure and Fluid StaticsshahganNo ratings yet
- 3.7 Governing Equations and Boundary Conditions For P-Flow: 2.20 - Marine Hydrodynamics, Fall 2014Document28 pages3.7 Governing Equations and Boundary Conditions For P-Flow: 2.20 - Marine Hydrodynamics, Fall 2014Felix FisherNo ratings yet
- Summary of The Equations of Fluid Dynamics: ReferenceDocument22 pagesSummary of The Equations of Fluid Dynamics: Referencerahul6635No ratings yet
- Chapter 7 PDFDocument22 pagesChapter 7 PDFteknikpembakaran2013No ratings yet
- Chap 3 Sec2 PDFDocument17 pagesChap 3 Sec2 PDFteknikpembakaran2013No ratings yet
- Flow in Conduits and PipesDocument26 pagesFlow in Conduits and Pipesteknikpembakaran2013No ratings yet
- Formulario de AerodinamicaDocument3 pagesFormulario de AerodinamicaFrancisco SantiagoNo ratings yet
- Chap 4 Sec1 PDFDocument15 pagesChap 4 Sec1 PDFteknikpembakaran2013No ratings yet
- Chapter 8 Flow in Conduits: Entrance and Developed FlowsDocument43 pagesChapter 8 Flow in Conduits: Entrance and Developed FlowsRicardo ACNo ratings yet
- Radial Flow and Well Testing Basics: MSC Rem Reservoir Evaluation and ManagementDocument55 pagesRadial Flow and Well Testing Basics: MSC Rem Reservoir Evaluation and ManagementLuis MancillaNo ratings yet
- Advanced Fluid Mechanics - Chapter 04 - Very Slow MotionDocument15 pagesAdvanced Fluid Mechanics - Chapter 04 - Very Slow Motionsunil481No ratings yet
- Omega Equation: y V X U P P P PDocument3 pagesOmega Equation: y V X U P P P PSteven ScottNo ratings yet
- Chapter8 Latest Combined ComplejoDocument49 pagesChapter8 Latest Combined ComplejoLuis Carlos Gonzales RengifoNo ratings yet
- Vector Operator Identities: D DF F D DP PDocument8 pagesVector Operator Identities: D DF F D DP PAshvin GraceNo ratings yet
- Laminar Flow between Fixed Parallel PlatesDocument11 pagesLaminar Flow between Fixed Parallel PlatesLeillane BeatrizNo ratings yet
- 2 5stokesDocument6 pages2 5stokesSingh AnujNo ratings yet
- Fluid Dynamics: Prepared By: Aamina Rajput Lecturer CedDocument53 pagesFluid Dynamics: Prepared By: Aamina Rajput Lecturer CedTalha MumtazNo ratings yet
- MECH 280 Final Exam: Prof. James Olson TA Paul KrochakDocument8 pagesMECH 280 Final Exam: Prof. James Olson TA Paul KrochakirqoviNo ratings yet
- BernoulliDocument33 pagesBernoulliabderrahimn100% (1)
- Fluid 06Document140 pagesFluid 06Edgar HuancaNo ratings yet
- Compressible Flow PDFDocument90 pagesCompressible Flow PDFOmer TokhNo ratings yet
- Psi OmegaDocument10 pagesPsi OmegaPranav VyasNo ratings yet
- Elementary Fluid Dynamics: The Bernoulli Equation: CEE 331 June 8, 2006Document33 pagesElementary Fluid Dynamics: The Bernoulli Equation: CEE 331 June 8, 2006ali_trikiNo ratings yet
- Fluid Mechanics Cheat SheetDocument3 pagesFluid Mechanics Cheat SheettalatbilalNo ratings yet
- Bernoulli Equation DerivationDocument22 pagesBernoulli Equation DerivationEmre ANo ratings yet
- Advanced Fluid Mechanics - Chapter 05 - Boundary Layer TheoryDocument33 pagesAdvanced Fluid Mechanics - Chapter 05 - Boundary Layer Theorysunil481No ratings yet
- Fluid Mechanics FundamentalsDocument11 pagesFluid Mechanics FundamentalsDeeptanshu ShuklaNo ratings yet
- Conditions at A Discontinuity Dimensionless ParametersDocument7 pagesConditions at A Discontinuity Dimensionless ParametersEoin BurkeNo ratings yet
- Viscous Flow in PipesDocument58 pagesViscous Flow in PipesHarsh SharmaNo ratings yet
- Chapter 9 Flow Over Immersed Bodies: Basic ConsiderationsDocument37 pagesChapter 9 Flow Over Immersed Bodies: Basic ConsiderationsChandan kumarNo ratings yet
- Ch. IV Differential Relations For A Fluid Particle: V (R, T) I U X, Y, Z, T J V X, Y, Z, T K W X, Y, Z, TDocument12 pagesCh. IV Differential Relations For A Fluid Particle: V (R, T) I U X, Y, Z, T J V X, Y, Z, T K W X, Y, Z, TAditya GargNo ratings yet
- 2nd ASSIGNMENTDocument15 pages2nd ASSIGNMENTNazenin GüreNo ratings yet
- Jackson Electrodynamics, Notes 1Document5 pagesJackson Electrodynamics, Notes 1Tianyi ZhangNo ratings yet
- Lecture20 Two Independents Variables 3Document18 pagesLecture20 Two Independents Variables 3shubhamNo ratings yet
- Flow Around SphereDocument11 pagesFlow Around SpheremiladNo ratings yet
- CHAP03 - Dasar-Dasar Dinamika FluidaDocument94 pagesCHAP03 - Dasar-Dasar Dinamika FluidaAZHAR FATHURRAHMANNo ratings yet
- Chapter 3 Bernoulli Equation: 3.1 Flow Patterns: Streamlines, Pathlines, StreaklinesDocument24 pagesChapter 3 Bernoulli Equation: 3.1 Flow Patterns: Streamlines, Pathlines, StreaklinesManu KumarNo ratings yet
- LEC-7 FLUID DYNAMICS Part-A & B With NumericalsDocument57 pagesLEC-7 FLUID DYNAMICS Part-A & B With NumericalsTAYMOOR IMRANNo ratings yet
- ME2134 PPT Part 2A PDFDocument14 pagesME2134 PPT Part 2A PDFWai-Yen ChanNo ratings yet
- Fluid Mechanics - AS102: Class Note No: 10Document31 pagesFluid Mechanics - AS102: Class Note No: 10Pranav KulkarniNo ratings yet
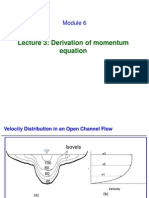
- Lecture 3: Derivation of Momentum EquationDocument33 pagesLecture 3: Derivation of Momentum EquationJanakiSreeramNo ratings yet
- 1 s2.0 S0997754602011846 MainDocument8 pages1 s2.0 S0997754602011846 MainAbdul MajeedNo ratings yet
- Inviscid Fluid FlowDocument22 pagesInviscid Fluid FlowmiladNo ratings yet
- Fluid Mechanics: Free and Forced Vortex FlowDocument42 pagesFluid Mechanics: Free and Forced Vortex FlowBsc CivilNo ratings yet
- Torque Drag SPE1Document9 pagesTorque Drag SPE1Alex CadareNo ratings yet
- 22 Online Lifting Line TheoryDocument16 pages22 Online Lifting Line TheoryNhật VũNo ratings yet
- Student Handout 16 2014Document14 pagesStudent Handout 16 2014kietniNo ratings yet
- DIFFERENTIAL ANALYSIS OF FLUID FLOWDocument120 pagesDIFFERENTIAL ANALYSIS OF FLUID FLOWWaqar A. KhanNo ratings yet
- Chee 331 Notes On Fluid IzationDocument21 pagesChee 331 Notes On Fluid Ization0721673895No ratings yet
- 9 Flow in Pipes - With FiguresDocument59 pages9 Flow in Pipes - With FiguresCarlos SerranoNo ratings yet
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
- Manajemen Pemasaran - Chapter 5Document18 pagesManajemen Pemasaran - Chapter 5teknikpembakaran2013No ratings yet
- Randolph College Abroad: The World in Britain: 2013-2014 Application ProcedureDocument10 pagesRandolph College Abroad: The World in Britain: 2013-2014 Application Procedureteknikpembakaran2013No ratings yet
- Manajemen Pemasaran - Chapter 7Document4 pagesManajemen Pemasaran - Chapter 7teknikpembakaran2013No ratings yet
- Analyzing Factors That Influence Consumer MarketsDocument15 pagesAnalyzing Factors That Influence Consumer Marketsteknikpembakaran2013No ratings yet
- InggrisDocument21 pagesInggrisErdorik Ramadani0% (1)
- ScholarDocument11 pagesScholarteknikpembakaran2013No ratings yet
- Hovercraft Toy PatentDocument16 pagesHovercraft Toy Patentteknikpembakaran2013No ratings yet
- MANAJEMEN PEMASARAN - Chapter 1Document20 pagesMANAJEMEN PEMASARAN - Chapter 1teknikpembakaran2013No ratings yet
- Tugas Kelompok 1 (Kamis Pagi)Document17 pagesTugas Kelompok 1 (Kamis Pagi)teknikpembakaran2013No ratings yet
- Sample Letter of Application For ScholarshipDocument1 pageSample Letter of Application For Scholarshipteknikpembakaran2013No ratings yet
- 1 s2.0 S0360544211003616 Main PDFDocument16 pages1 s2.0 S0360544211003616 Main PDFteknikpembakaran2013No ratings yet
- Manual Handling: Workplace Health, Safety and Compensation Commission of New BrunswickDocument21 pagesManual Handling: Workplace Health, Safety and Compensation Commission of New BrunswickmitualvesNo ratings yet
- 1 s2.0 S089417770900171X Main - 2 PDFDocument9 pages1 s2.0 S089417770900171X Main - 2 PDFteknikpembakaran2013No ratings yet
- Apply to Southern Taiwan University for international studentsDocument5 pagesApply to Southern Taiwan University for international studentsphonghoangdthvNo ratings yet
- Part 3 Application Form MSC ScholarhipDocument4 pagesPart 3 Application Form MSC Scholarhipteknikpembakaran2013No ratings yet
- OTS ApplicationForm 2013 R1Document3 pagesOTS ApplicationForm 2013 R1teknikpembakaran2013No ratings yet
- CH0 PDFDocument18 pagesCH0 PDFteknikpembakaran2013No ratings yet
- The Hidden Costs of Accidents - An Iceberg ModelDocument1 pageThe Hidden Costs of Accidents - An Iceberg Modelteknikpembakaran2013No ratings yet
- Introduction to Mechatronics Lecture (ME-133Document4 pagesIntroduction to Mechatronics Lecture (ME-133teknikpembakaran2013No ratings yet
- Chapter 11 PDFDocument16 pagesChapter 11 PDFteknikpembakaran2013No ratings yet
- Applicants E13 PDFDocument6 pagesApplicants E13 PDFteknikpembakaran2013No ratings yet
- Accident Cost Analysis Form PDFDocument2 pagesAccident Cost Analysis Form PDFteknikpembakaran2013No ratings yet
- Chapter 11 PDFDocument16 pagesChapter 11 PDFteknikpembakaran2013No ratings yet
- Flow in Conduits and PipesDocument26 pagesFlow in Conduits and Pipesteknikpembakaran2013No ratings yet
- Chapter 2dimensional Analysis and Similitude PDFDocument19 pagesChapter 2dimensional Analysis and Similitude PDFSaddam H. MussieNo ratings yet
- Chapter 6 PDFDocument18 pagesChapter 6 PDFteknikpembakaran2013No ratings yet
- Chapter 7 PDFDocument22 pagesChapter 7 PDFteknikpembakaran2013No ratings yet
- 57:020 Mechanics of Fluids and Transport Processes: Class NotesDocument7 pages57:020 Mechanics of Fluids and Transport Processes: Class Notesteknikpembakaran2013No ratings yet
- Fluid Properties and Concepts ExplainedDocument12 pagesFluid Properties and Concepts Explainedteknikpembakaran2013No ratings yet
- Job Description of Atco: M Hammad AhmadDocument3 pagesJob Description of Atco: M Hammad AhmadHammad AhmadNo ratings yet
- MEP451PowerStations Intro&WindDocument156 pagesMEP451PowerStations Intro&WindAhmed Mohamed HassanNo ratings yet
- Cessna 208 (B) Caravan I T.T.R.Document7 pagesCessna 208 (B) Caravan I T.T.R.Junior Mebude SimbaNo ratings yet
- Axial Momentum TheoryDocument10 pagesAxial Momentum Theorymanikandan_murugaiahNo ratings yet
- Upper and Lower FinsDocument12 pagesUpper and Lower FinsmahdicoincheNo ratings yet
- B-A320 ATA 33 LightsDocument50 pagesB-A320 ATA 33 LightsCarlos MelgarNo ratings yet
- ODE Capability List 2017 10 24Document8 pagesODE Capability List 2017 10 24cesarNo ratings yet
- Kseabikf PDF 07aug22Document48 pagesKseabikf PDF 07aug22Darion JeromeNo ratings yet
- Flight SimulatorsDocument5 pagesFlight SimulatorsFrancisco M. RamosNo ratings yet
- AFI21-101 Aircraft and Equipment Maintenance ManagementDocument380 pagesAFI21-101 Aircraft and Equipment Maintenance ManagementPrinses1234567No ratings yet
- g12 English Revision Sheet 1st QuarterDocument15 pagesg12 English Revision Sheet 1st Quartershadygamal700No ratings yet
- AOPA Cardinal 177 Pilot's GuideDocument44 pagesAOPA Cardinal 177 Pilot's GuideJorge VazquezNo ratings yet
- Level III Ata 49 ApuDocument60 pagesLevel III Ata 49 ApuGuyNo ratings yet
- CSU Non Sparking Safety Tools CatalogDocument88 pagesCSU Non Sparking Safety Tools CatalogJhon SanfraNo ratings yet
- Model Aircraft - August 2020 PDFDocument86 pagesModel Aircraft - August 2020 PDFChris W. Balmer100% (2)
- Rahul Lohar: Aeronautical EngineerDocument6 pagesRahul Lohar: Aeronautical EngineerRahul LoharNo ratings yet
- Smartboard TinkercadDocument2 pagesSmartboard Tinkercadapi-642138195No ratings yet
- Elements of Practical Aerodynamics by B. JonesDocument403 pagesElements of Practical Aerodynamics by B. JonesJasper SaceNo ratings yet
- ANANYA-PTFE Coatings, Teflon Coating, Halar Coating, Xylan Coating Services, Corrosion Resistant Coatings, Non Stick CoatingDocument40 pagesANANYA-PTFE Coatings, Teflon Coating, Halar Coating, Xylan Coating Services, Corrosion Resistant Coatings, Non Stick CoatingAnanya CoatingsNo ratings yet
- 1 2 1 A AircraftcontrolsurfaceDocument3 pages1 2 1 A Aircraftcontrolsurfaceapi-325609547No ratings yet
- Exact Solutions To The Navier-Stokes EquationsDocument7 pagesExact Solutions To The Navier-Stokes EquationsMohamad KhairNo ratings yet
- Flow SeparationDocument14 pagesFlow SeparationShyam PandeyNo ratings yet
- ThinairfoilDocument3 pagesThinairfoilerickNo ratings yet
- Guide to Structural Analysis Beam ExampleDocument6 pagesGuide to Structural Analysis Beam ExamplegertjaniNo ratings yet
- Gear TypesDocument5 pagesGear TypesJagdish MohapatraNo ratings yet
- A Short IntroductionDocument4 pagesA Short IntroductionMURALINo ratings yet
- 1400Document2 pages1400Yonathan GomezNo ratings yet
- Design and Fabrication of Small Scale Trainer AircraftDocument24 pagesDesign and Fabrication of Small Scale Trainer AircraftTarik Hassan ElsonniNo ratings yet