You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Service Manual 900 OG Factory 16V M85-M93Document572 pagesService Manual 900 OG Factory 16V M85-M93Sting Eyes100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 005-012 Fuel Injection Pumps, In-Line: InstallDocument14 pages005-012 Fuel Injection Pumps, In-Line: InstallMuhammad Ishfaq100% (3)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Numerical Simulations of Piano StringsDocument7 pagesNumerical Simulations of Piano StringsMihai DincaNo ratings yet
- Vector Mechanics For Engineers-STATICSDocument15 pagesVector Mechanics For Engineers-STATICSBookMaggot0% (1)
- BS en 12583 - 2014 - Gas Infrastructure. Compressor Stations. Functional Requirements.Document56 pagesBS en 12583 - 2014 - Gas Infrastructure. Compressor Stations. Functional Requirements.SDP02No ratings yet
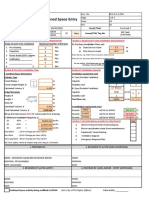
- Ventilation Plan For Confined Space EntryDocument9 pagesVentilation Plan For Confined Space EntryMohamad Nazmi Mohamad Rafian100% (1)
- Why Choose MBA MSC BUSDocument1 pageWhy Choose MBA MSC BUSBookMaggotNo ratings yet
- Weekly Nursing Student Planner and Study CalendarDocument2 pagesWeekly Nursing Student Planner and Study CalendarDavid BayerNo ratings yet
- 15Document5 pages15BookMaggotNo ratings yet
- Composites SelectionDocument2 pagesComposites SelectionBookMaggotNo ratings yet
- Test altimeter accuracy at room conditionsDocument1 pageTest altimeter accuracy at room conditionsBookMaggotNo ratings yet
- Aircraft Refueling System Is A Refuelling Equipment For AircraftDocument1 pageAircraft Refueling System Is A Refuelling Equipment For AircraftBookMaggotNo ratings yet
- 17) What Is The Symbol of The Field Effect Transistor?Document4 pages17) What Is The Symbol of The Field Effect Transistor?BookMaggotNo ratings yet
- Cover Letter!Document1 pageCover Letter!BookMaggotNo ratings yet
- 1Document1 page1BookMaggotNo ratings yet
- Exhausted After Long Registration on First Day at Aviation CollegeDocument1 pageExhausted After Long Registration on First Day at Aviation CollegeBookMaggotNo ratings yet
- Cover LetterDocument2 pagesCover LetterBookMaggotNo ratings yet
- Understanding The Concept of The Gear Ratio: 1.27 Inches / 2 0.635 InchesDocument1 pageUnderstanding The Concept of The Gear Ratio: 1.27 Inches / 2 0.635 InchesBookMaggotNo ratings yet
- Seat Pitch Position On Two Seats, One Behind The Other - It Is NOT The Legrest Area As SomeDocument3 pagesSeat Pitch Position On Two Seats, One Behind The Other - It Is NOT The Legrest Area As SomeBookMaggotNo ratings yet
- The Silent EmergencyDocument5 pagesThe Silent EmergencyBookMaggotNo ratings yet
- 737sec1 PDFDocument10 pages737sec1 PDFBookMaggotNo ratings yet
- The Problems of Instrument Part On Jet Streaming AircraftDocument2 pagesThe Problems of Instrument Part On Jet Streaming AircraftBookMaggotNo ratings yet
- QuestionaireDocument7 pagesQuestionaireBookMaggotNo ratings yet
- Project p-37Document2 pagesProject p-37BookMaggotNo ratings yet
- System DescriptionDocument2 pagesSystem DescriptionBookMaggotNo ratings yet
- Defuel Aircraft: New Zealand Qualifications Authority 2006Document4 pagesDefuel Aircraft: New Zealand Qualifications Authority 2006Arie WibowoNo ratings yet
- Assignment Fire 1Document14 pagesAssignment Fire 1BookMaggotNo ratings yet
- Toefl 2Document8 pagesToefl 2sangho,wooNo ratings yet
- Typical Aircraft Charging CircuitDocument1 pageTypical Aircraft Charging CircuitBookMaggotNo ratings yet
- RECOMMENDATIONSDocument4 pagesRECOMMENDATIONSBookMaggotNo ratings yet
- Assignment CabinDocument5 pagesAssignment CabinBookMaggotNo ratings yet
- PENTINGDocument5 pagesPENTINGBookMaggotNo ratings yet
- RecipDocument5 pagesRecipBookMaggotNo ratings yet
- Toefl 3Document8 pagesToefl 3sangho,wooNo ratings yet
- Meinrad 2018 All Symbols With NumbersDocument4 pagesMeinrad 2018 All Symbols With NumbersXer N. AcostaNo ratings yet
- Factors Affecting Drying Rates and MechanismsDocument4 pagesFactors Affecting Drying Rates and MechanismsMahesh VoraNo ratings yet
- Trade ReportDocument6 pagesTrade ReportIKEOKOLIE HOMEPCNo ratings yet
- Product PlanningDocument23 pagesProduct PlanningGrechen CabusaoNo ratings yet
- Lesson 5: Cultural Relativism: Learning OutcomesDocument4 pagesLesson 5: Cultural Relativism: Learning OutcomesGanda GandaNo ratings yet
- Materi HAZOP Dan Relevansi Terhadap ASME Dan APIDocument9 pagesMateri HAZOP Dan Relevansi Terhadap ASME Dan APIAhmad KharisNo ratings yet
- Adv - Student - HandbookDocument61 pagesAdv - Student - HandbookOmkar BezzankiNo ratings yet
- Ty 9900Document4 pagesTy 9900Samir DarweshNo ratings yet
- Worksheet Chapter 50 Introduction To Ecology The Scope of EcologyDocument2 pagesWorksheet Chapter 50 Introduction To Ecology The Scope of EcologyFernando CastilloNo ratings yet
- Safety and Arming Device Timer 6-7-1976Document5 pagesSafety and Arming Device Timer 6-7-1976nguyenhNo ratings yet
- Dav Public School, Berhampur, Odisha Summer Holiday HomeworkDocument3 pagesDav Public School, Berhampur, Odisha Summer Holiday HomeworkOmNo ratings yet
- Wellmark Series 2600 PDFDocument6 pagesWellmark Series 2600 PDFHomar Hernández JuncoNo ratings yet
- Transmission Line Surge Impedance Loading ExplainedDocument3 pagesTransmission Line Surge Impedance Loading ExplainedviksoniNo ratings yet
- Elon Musk: AI Is A Fundamental Risk To The Existence of Human CivilizationDocument19 pagesElon Musk: AI Is A Fundamental Risk To The Existence of Human CivilizationBDApp StarNo ratings yet
- Technical Specifications For Construction Tower Support 113-Shc-Ta-001 and 113-Sch-Ta-002 at The Coke Handling SystemDocument12 pagesTechnical Specifications For Construction Tower Support 113-Shc-Ta-001 and 113-Sch-Ta-002 at The Coke Handling SystemAna RojasNo ratings yet
- ĐỀ CƯƠNG ÔN TẬP HỌC KÌ 1-LỚP 12Document15 pagesĐỀ CƯƠNG ÔN TẬP HỌC KÌ 1-LỚP 12Anh Duc VuNo ratings yet
- JURNAL PENCONG IJAS FixDocument12 pagesJURNAL PENCONG IJAS Fixmasri ridwanNo ratings yet
- Earthquake Faults and Tectonic Plate Boundaries ExplainedDocument21 pagesEarthquake Faults and Tectonic Plate Boundaries ExplainedAngelo RemeticadoNo ratings yet
- 10 - The Geological Interpretation of Well LogsDocument292 pages10 - The Geological Interpretation of Well LogsLorenza LorenzanaNo ratings yet
- BHCC Peri 5c Jyps - MK Classroom Toilet (Pending To Sign by Moe) - Removed - RemovedDocument8 pagesBHCC Peri 5c Jyps - MK Classroom Toilet (Pending To Sign by Moe) - Removed - RemovedrajavelNo ratings yet
- Matlab 8Document6 pagesMatlab 8Robert RoigNo ratings yet
- Tutorial Quartus II Simulation VHDLDocument27 pagesTutorial Quartus II Simulation VHDLHeitor B. S. BezerraNo ratings yet
- 5054 s09 QP 1Document20 pages5054 s09 QP 1Hany ElGezawyNo ratings yet
- Philips 170v7fbDocument95 pagesPhilips 170v7fbaposticaaNo ratings yet
- Anthony Robbins With Harvard Business SchoolDocument3 pagesAnthony Robbins With Harvard Business SchoolluffylovemangaNo ratings yet