You might also like
- Chapter 1 Signals and Systems - Week1Document33 pagesChapter 1 Signals and Systems - Week1yonalsderantauNo ratings yet
- Introducing "Language For Describing Signals and Systems"Document32 pagesIntroducing "Language For Describing Signals and Systems"Vijay VermaNo ratings yet
- Signals and Systems Lecture NotesDocument41 pagesSignals and Systems Lecture Notesباسم رجبNo ratings yet
- EE 424 #1: Sampling and ReconstructionDocument30 pagesEE 424 #1: Sampling and ReconstructionArunShanNo ratings yet
- Signals and SystemsDocument17 pagesSignals and SystemsSanthosh Vegeta Goku GNo ratings yet
- Chapter 1 Signal and SystemsDocument30 pagesChapter 1 Signal and SystemsJex DeyNo ratings yet
- DSP Chapter 4 Sampling of Continuous-time SignalsDocument29 pagesDSP Chapter 4 Sampling of Continuous-time SignalsShah HussainNo ratings yet
- Fourier Analysis of Signals and Systems: Babul IslamDocument24 pagesFourier Analysis of Signals and Systems: Babul IslamapcandyboyNo ratings yet
- Introduction to Signal Types and PropertiesDocument4 pagesIntroduction to Signal Types and PropertiesZarulnaim ZulkarnainNo ratings yet
- Digital Signal ProcessingDocument22 pagesDigital Signal Processingtdhinakaran100% (1)
- Mathematical Modelling of Sampling ProcessDocument6 pagesMathematical Modelling of Sampling ProcessNishant SaxenaNo ratings yet
- Signals and Systems Lecture Note #1: Presentation By: I.Nelson Sl/Ece SSN College of EngineeringDocument36 pagesSignals and Systems Lecture Note #1: Presentation By: I.Nelson Sl/Ece SSN College of Engineeringvasece4537577No ratings yet
- Essential Components of Digital Signal Processing SystemsDocument4 pagesEssential Components of Digital Signal Processing SystemsMd. Asaduzzaman RazNo ratings yet
- DSP Qs 2marksDocument36 pagesDSP Qs 2marksanon_624151290No ratings yet
- Classification of Signals in Signals and SystemsDocument92 pagesClassification of Signals in Signals and SystemsNestorNo ratings yet
- EC6303 Signals and Systems Lecture NotesDocument41 pagesEC6303 Signals and Systems Lecture NotesSudeshNo ratings yet
- Unit1 1SS1Document20 pagesUnit1 1SS1Ram MurthyNo ratings yet
- Sistemas de Comunicaciones SCT54-1 Signals and Systems: Fabio Suárez Fabiosuarez@itm - Edu.co ITM 2020-1Document26 pagesSistemas de Comunicaciones SCT54-1 Signals and Systems: Fabio Suárez Fabiosuarez@itm - Edu.co ITM 2020-1Jenny OsornoNo ratings yet
- CHP 1 (Completed)Document61 pagesCHP 1 (Completed)Ronaldo KmeNo ratings yet
- Signals and Systems Question BankDocument13 pagesSignals and Systems Question BankDineshNo ratings yet
- Signals and Systems 01Document10 pagesSignals and Systems 01nvbondNo ratings yet
- Introduction to Signal ClassificationDocument3 pagesIntroduction to Signal ClassificationMd Minhaj Ahmed AhmedNo ratings yet
- CT and DT Signals, Systems and PropertiesDocument69 pagesCT and DT Signals, Systems and PropertiesSivaKumar AnandanNo ratings yet
- SS-2-Marks Questions With AnswersDocument12 pagesSS-2-Marks Questions With AnswersPasupuleti Venkata RamanaNo ratings yet
- Signals, Continuous Time and Discrete TimeDocument27 pagesSignals, Continuous Time and Discrete TimeSukanta ParidaNo ratings yet
- Ni Two Marks - NewDocument37 pagesNi Two Marks - NewAnuishuya SugumaranNo ratings yet
- Signals and Systems: Lecture NotesDocument107 pagesSignals and Systems: Lecture Notesb7qxnnm8mzNo ratings yet
- UNIT I-1Document17 pagesUNIT I-1dr.omprakash.itNo ratings yet
- Signals 1Document15 pagesSignals 1Rupesh SushirNo ratings yet
- TWO MARK QUESTION AND ANSWERS ON SIGNALS AND SYSTEMSDocument17 pagesTWO MARK QUESTION AND ANSWERS ON SIGNALS AND SYSTEMSSella ThambiNo ratings yet
- Spectrum AnalysisDocument35 pagesSpectrum AnalysisdogueylerNo ratings yet
- Lecture 9: Brief Summary of Digital Signal Processing.: 1.1 OperationsDocument15 pagesLecture 9: Brief Summary of Digital Signal Processing.: 1.1 OperationsAce SilvestreNo ratings yet
- 2-Mark Questions Anna University Signals and SystemsDocument11 pages2-Mark Questions Anna University Signals and SystemsSonu100% (2)
- (PPT) DFT DTFS and Transforms (Stanford)Document13 pages(PPT) DFT DTFS and Transforms (Stanford)Wesley GeorgeNo ratings yet
- Rajalakshmi Engineering College, ThandalamDocument40 pagesRajalakshmi Engineering College, Thandalamaarthy1207vaishnavNo ratings yet
- Review of Signals and SystemsDocument25 pagesReview of Signals and SystemsAdrian TanNo ratings yet
- SS PPT-08.07.2020Document32 pagesSS PPT-08.07.2020BENAZIR BEGAM RNo ratings yet
- ECE 301 Signals Homework #1Document4 pagesECE 301 Signals Homework #1ShuaibNo ratings yet
- Signals & System Lecture by OppenheimDocument10 pagesSignals & System Lecture by OppenheimJeevith JeeviNo ratings yet
- IT 1252 - Digital Signal ProcessingDocument22 pagesIT 1252 - Digital Signal Processinganon-384794100% (3)
- Lab Sheet 1: Analog To Digital Conversion (ADC) and Digital To Analog Conversion (DAC) FundamentalsDocument13 pagesLab Sheet 1: Analog To Digital Conversion (ADC) and Digital To Analog Conversion (DAC) FundamentalsMasud SarkerNo ratings yet
- S & S 2 MarksDocument30 pagesS & S 2 MarkspriyajegaNo ratings yet
- Digital Signal Processing: 2 Marks & Question-AnswersDocument30 pagesDigital Signal Processing: 2 Marks & Question-AnswerssridharanchandranNo ratings yet
- Fundamentals of Signals: 1.1 What Is A Signal?Document22 pagesFundamentals of Signals: 1.1 What Is A Signal?Sai KiranNo ratings yet
- 01 IntroductionDocument92 pages01 IntroductionISHITA BASU ROYNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)From EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)No ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Lab 2 BFSK and QAM Matlab SimulationDocument3 pagesLab 2 BFSK and QAM Matlab SimulationMichael HsiaoNo ratings yet
- Simulation of Data Communication Techniques in MatlabDocument8 pagesSimulation of Data Communication Techniques in MatlabJavier Ruiz ThorrensNo ratings yet
- 2D Arrays Mini-AssignmentDocument2 pages2D Arrays Mini-AssignmentMichael HsiaoNo ratings yet
- Slope (Integrating) Adc - Digital-Analog ConversionDocument3 pagesSlope (Integrating) Adc - Digital-Analog ConversionMichael HsiaoNo ratings yet
- 2.1 Random Variables 2.1.1 Definition: PX PX XDocument13 pages2.1 Random Variables 2.1.1 Definition: PX PX XMichael Hsiao100% (1)
- Block Diagrams - Lecture NotesDocument8 pagesBlock Diagrams - Lecture NotesMichael HsiaoNo ratings yet
- ICN210S Assignment 1Document11 pagesICN210S Assignment 1Michael HsiaoNo ratings yet
- Developing A Networking LexiconDocument2 pagesDeveloping A Networking LexiconMichael HsiaoNo ratings yet
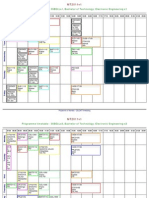
- Programme Timetable - 35bells1, Bachelor of Technology: Electronic Engineering S1Document6 pagesProgramme Timetable - 35bells1, Bachelor of Technology: Electronic Engineering S1Michael HsiaoNo ratings yet
- Programme Timetable - Bachelor of Engineering: Electronics & Telecommunications s1Document7 pagesProgramme Timetable - Bachelor of Engineering: Electronics & Telecommunications s1Michael HsiaoNo ratings yet
- Del620s NotesDocument13 pagesDel620s NotesMichael HsiaoNo ratings yet
- 2nd Quarterly Exam in Math 7Document4 pages2nd Quarterly Exam in Math 7LIWLIWA SUGUITANNo ratings yet
- Sti CollegeDocument9 pagesSti Collegejayson asencionNo ratings yet
- Viewpoint 2 Teacher's BookDocument21 pagesViewpoint 2 Teacher's BookMafeDeHorta27% (15)
- Allegory of The CaveDocument2 pagesAllegory of The CaveVanessa SantosNo ratings yet
- Human Flourishing ReducedDocument6 pagesHuman Flourishing ReducedJanine anzanoNo ratings yet
- Scope of The StudyDocument13 pagesScope of The StudyKather ShaNo ratings yet
- BS09 0875 882Document8 pagesBS09 0875 882Atanas StoykovNo ratings yet
- BS en 10217-6-2019Document42 pagesBS en 10217-6-2019Federico De MartiniNo ratings yet
- Cisco Network Services Orchestrator (NSO) Operations (NSO200) v2.0Document3 pagesCisco Network Services Orchestrator (NSO) Operations (NSO200) v2.0parthieeeNo ratings yet
- TEOCO case study analyzes employee-owned cultureDocument11 pagesTEOCO case study analyzes employee-owned cultureNaushilMaknojia0% (1)
- Wormhole: Topological SpacetimeDocument14 pagesWormhole: Topological SpacetimeHimanshu GiriNo ratings yet
- Narrative On Implementation of AkapDocument7 pagesNarrative On Implementation of AkapAyejae Pateña100% (2)
- Rankine Theory PDFDocument23 pagesRankine Theory PDFHamza NadeemNo ratings yet
- Problems SIH2019Document16 pagesProblems SIH2019hksNo ratings yet
- Gen Ed Day 5Document5 pagesGen Ed Day 5Jessica Villanueva100% (1)
- Absences Add Up:: How School Attendance Influences Student SuccessDocument16 pagesAbsences Add Up:: How School Attendance Influences Student SuccessMJSwayNo ratings yet
- Robotics Course StructureDocument4 pagesRobotics Course StructurerohitNo ratings yet
- VSTOA Power ToolsDocument16 pagesVSTOA Power ToolsHerbert LeipoldNo ratings yet
- Instrumentation in Earthquake Seismology PDFDocument365 pagesInstrumentation in Earthquake Seismology PDFKumar PallavNo ratings yet
- Determination of CaCO3 in The EggshellDocument33 pagesDetermination of CaCO3 in The EggshellbushlalaNo ratings yet
- Star Fleet Ships of The Four Years War, Volume 2Document28 pagesStar Fleet Ships of The Four Years War, Volume 2Rob RobertsNo ratings yet
- Instant Download Linear Algebra A Modern Introduction 3rd Edition Poole Solutions Manual PDF Full ChapterDocument32 pagesInstant Download Linear Algebra A Modern Introduction 3rd Edition Poole Solutions Manual PDF Full ChapterChristinaSmithteydp100% (8)
- 6405 23062 2 PB PDFDocument15 pages6405 23062 2 PB PDFBaim Ar RayyanNo ratings yet
- Storeway FDA 2400 Disk Array Unit User's Guide: 86 A1 04ER 00 Order ReferenceDocument128 pagesStoreway FDA 2400 Disk Array Unit User's Guide: 86 A1 04ER 00 Order ReferenceJorge Duran HerasNo ratings yet
- KART STEERING SYSTEM OPTIMIZATION AND SIMULATIONDocument7 pagesKART STEERING SYSTEM OPTIMIZATION AND SIMULATIONgame_freakerboy_8346No ratings yet
- Science Report For Coins RotationDocument2 pagesScience Report For Coins Rotationapi-253395143No ratings yet
- Tower Scientific CompanyDocument3 pagesTower Scientific Companymaloy0% (1)
- PHYSICS-CHAPTER-1-QUESTIONSDocument5 pagesPHYSICS-CHAPTER-1-QUESTIONSMohamadNo ratings yet
- Linear Programming Model ComponentsDocument35 pagesLinear Programming Model ComponentsSaad ShaikhNo ratings yet
- Classical Conditioning Worksheet 1Document2 pagesClassical Conditioning Worksheet 1api-642709499No ratings yet

























































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-1-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1699542561?v=1)