You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Manajemen Pemasaran - Chapter 7Document4 pagesManajemen Pemasaran - Chapter 7teknikpembakaran2013No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Analyzing Factors That Influence Consumer MarketsDocument15 pagesAnalyzing Factors That Influence Consumer Marketsteknikpembakaran2013No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 1 s2.0 S0360544211003616 Main PDFDocument16 pages1 s2.0 S0360544211003616 Main PDFteknikpembakaran2013No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Sample Letter of Application For ScholarshipDocument1 pageSample Letter of Application For Scholarshipteknikpembakaran2013No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Tugas Kelompok 1 (Kamis Pagi)Document17 pagesTugas Kelompok 1 (Kamis Pagi)teknikpembakaran2013No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- OTS ApplicationForm 2013 R1Document3 pagesOTS ApplicationForm 2013 R1teknikpembakaran2013No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hovercraft Toy PatentDocument16 pagesHovercraft Toy Patentteknikpembakaran2013No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Manajemen Pemasaran - Chapter 5Document18 pagesManajemen Pemasaran - Chapter 5teknikpembakaran2013No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- MANAJEMEN PEMASARAN - Chapter 1Document20 pagesMANAJEMEN PEMASARAN - Chapter 1teknikpembakaran2013No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- 1 s2.0 S089417770900171X Main - 2 PDFDocument9 pages1 s2.0 S089417770900171X Main - 2 PDFteknikpembakaran2013No ratings yet
- ScholarDocument11 pagesScholarteknikpembakaran2013No ratings yet
- Apply to Southern Taiwan University for international studentsDocument5 pagesApply to Southern Taiwan University for international studentsphonghoangdthvNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Randolph College Abroad: The World in Britain: 2013-2014 Application ProcedureDocument10 pagesRandolph College Abroad: The World in Britain: 2013-2014 Application Procedureteknikpembakaran2013No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Part 3 Application Form MSC ScholarhipDocument4 pagesPart 3 Application Form MSC Scholarhipteknikpembakaran2013No ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Manual Handling: Workplace Health, Safety and Compensation Commission of New BrunswickDocument21 pagesManual Handling: Workplace Health, Safety and Compensation Commission of New BrunswickmitualvesNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- InggrisDocument21 pagesInggrisErdorik Ramadani0% (1)
- The Hidden Costs of Accidents - An Iceberg ModelDocument1 pageThe Hidden Costs of Accidents - An Iceberg Modelteknikpembakaran2013No ratings yet
- Applicants E13 PDFDocument6 pagesApplicants E13 PDFteknikpembakaran2013No ratings yet
- Accident Cost Analysis Form PDFDocument2 pagesAccident Cost Analysis Form PDFteknikpembakaran2013No ratings yet
- Introduction to Mechatronics Lecture (ME-133Document4 pagesIntroduction to Mechatronics Lecture (ME-133teknikpembakaran2013No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Flow in Conduits and PipesDocument26 pagesFlow in Conduits and Pipesteknikpembakaran2013No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- CH0 PDFDocument18 pagesCH0 PDFteknikpembakaran2013No ratings yet
- Chapter 7 PDFDocument22 pagesChapter 7 PDFteknikpembakaran2013No ratings yet
- Chapter 11 PDFDocument16 pagesChapter 11 PDFteknikpembakaran2013No ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Chapter 2dimensional Analysis and Similitude PDFDocument19 pagesChapter 2dimensional Analysis and Similitude PDFSaddam H. MussieNo ratings yet
- 57:020 Mechanics of Fluids and Transport Processes: Class NotesDocument7 pages57:020 Mechanics of Fluids and Transport Processes: Class Notesteknikpembakaran2013No ratings yet
- Chapter 11 PDFDocument16 pagesChapter 11 PDFteknikpembakaran2013No ratings yet
- Chapter 6 PDFDocument18 pagesChapter 6 PDFteknikpembakaran2013No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Pressure Variation in Flowing FluidsDocument12 pagesPressure Variation in Flowing Fluidsteknikpembakaran2013No ratings yet
- Fluid Properties and Concepts ExplainedDocument12 pagesFluid Properties and Concepts Explainedteknikpembakaran2013No ratings yet
- Continuation in Auditing OverviewDocument21 pagesContinuation in Auditing OverviewJayNo ratings yet
- Chapter 1 Qus OnlyDocument28 pagesChapter 1 Qus OnlySaksharNo ratings yet
- MATH2070 Computer Project: Organise Porject FoldDocument4 pagesMATH2070 Computer Project: Organise Porject FoldAbdul Muqsait KenyeNo ratings yet
- Usa Easa 145Document31 pagesUsa Easa 145Surya VenkatNo ratings yet
- ARMOR Winter-Spring 2018 EditionDocument84 pagesARMOR Winter-Spring 2018 Editionmai100No ratings yet
- ASME Y14.6-2001 (R2007), Screw Thread RepresentationDocument27 pagesASME Y14.6-2001 (R2007), Screw Thread RepresentationDerekNo ratings yet
- Nature of ConversionDocument18 pagesNature of ConversionKiranNo ratings yet
- Conversion of Units of Temperature - Wikipedia, The Free Encyclopedia PDFDocument7 pagesConversion of Units of Temperature - Wikipedia, The Free Encyclopedia PDFrizal123No ratings yet
- Empowerment Technologies Learning ActivitiesDocument7 pagesEmpowerment Technologies Learning ActivitiesedzNo ratings yet
- Gaspardo Operation Manual Campo 22-32-2014 01 f07011089 UsaDocument114 pagesGaspardo Operation Manual Campo 22-32-2014 01 f07011089 UsaМихайленко МиколаNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- WitepsolDocument21 pagesWitepsolAnastasius HendrianNo ratings yet
- 21st Century LiteraciesDocument27 pages21st Century LiteraciesYuki SeishiroNo ratings yet
- GS Ep Cor 356Document7 pagesGS Ep Cor 356SangaranNo ratings yet
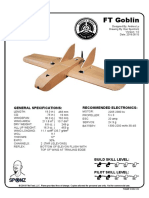
- FT Goblin Full SizeDocument7 pagesFT Goblin Full SizeDeakon Frost100% (1)
- Introduction To Elective DesignDocument30 pagesIntroduction To Elective Designabdullah 3mar abou reashaNo ratings yet
- Department of Labor: kwc25 (Rev-01-05)Document24 pagesDepartment of Labor: kwc25 (Rev-01-05)USA_DepartmentOfLaborNo ratings yet
- WELDING EQUIPMENT CALIBRATION STATUSDocument4 pagesWELDING EQUIPMENT CALIBRATION STATUSAMIT SHAHNo ratings yet
- OBHR Case StudyDocument8 pagesOBHR Case StudyYvonne TanNo ratings yet
- Defect Prevention On SRS Through ChecklistDocument2 pagesDefect Prevention On SRS Through Checklistnew account new accountNo ratings yet
- Global Cleantech Innovation Programme IndiaDocument122 pagesGlobal Cleantech Innovation Programme Indiaficisid ficisidNo ratings yet
- NEW CREW Fast Start PlannerDocument9 pagesNEW CREW Fast Start PlannerAnonymous oTtlhP100% (3)
- (SIRI Assessor Training) AM Guide Book - v2Document19 pages(SIRI Assessor Training) AM Guide Book - v2hadeelNo ratings yet
- BA 9000 - NIJ CTP Body Armor Quality Management System RequirementsDocument6 pagesBA 9000 - NIJ CTP Body Armor Quality Management System RequirementsAlberto GarciaNo ratings yet
- Hardened Concrete - Methods of Test: Indian StandardDocument16 pagesHardened Concrete - Methods of Test: Indian StandardjitendraNo ratings yet
- Top 35 Brokerage Firms in PakistanDocument11 pagesTop 35 Brokerage Firms in PakistannasiralisauNo ratings yet
- 3DS MAX SYLLABUSDocument8 pages3DS MAX SYLLABUSKannan RajaNo ratings yet
- Arizona Supreme CT Order Dismisses Special ActionDocument3 pagesArizona Supreme CT Order Dismisses Special Actionpaul weichNo ratings yet
- Instrumentos de Medición y Herramientas de Precisión Starrett DIAl TEST INDICATOR 196 A1ZDocument24 pagesInstrumentos de Medición y Herramientas de Precisión Starrett DIAl TEST INDICATOR 196 A1Zmicmarley2012No ratings yet
- CORE Education Bags Rs. 120 Cr. Order From Gujarat Govt.Document2 pagesCORE Education Bags Rs. 120 Cr. Order From Gujarat Govt.Sanjeev MansotraNo ratings yet
- Organisation Study Report On Star PVC PipesDocument16 pagesOrganisation Study Report On Star PVC PipesViswa Keerthi100% (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)