You might also like
- Elementos Básicos de ElectricidadDocument36 pagesElementos Básicos de ElectricidadEvelyn Rojas MonttNo ratings yet
- Check 22Document9 pagesCheck 22elkolo34No ratings yet
- 1-Inducción ElectromagnéticaDocument11 pages1-Inducción ElectromagnéticaErminsul Vicuña SalasNo ratings yet
- Escuela Mexicana de ElectricidadDocument14 pagesEscuela Mexicana de Electricidadmiriam_4No ratings yet
- Tesla: Metodo Energía Radiante en Estado Solido I+DDocument30 pagesTesla: Metodo Energía Radiante en Estado Solido I+DAriano Santo100% (1)
- Manual - de - Garantía - y - Mantenimiento - Kymco - AGILITY NAKED - 2 - 0 PDFDocument85 pagesManual - de - Garantía - y - Mantenimiento - Kymco - AGILITY NAKED - 2 - 0 PDFIngeniero aicNo ratings yet
- Toc 0465 06 02Document15 pagesToc 0465 06 02Carlos Felipe Vericat Sanz0% (1)
- Material Tabla Chequeo Diario Motoniveladoras Komatsu PDFDocument1 pageMaterial Tabla Chequeo Diario Motoniveladoras Komatsu PDFgonza3591No ratings yet
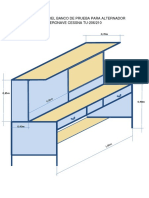
- Banco de Prueba AlternadorDocument2 pagesBanco de Prueba AlternadoredgarNo ratings yet
- Mod MotoresDocument61 pagesMod MotoresWil Efra Toapanta ToapantaNo ratings yet
- Problemas de Matemáticas Santillana (18 Cuadernos Completos)Document64 pagesProblemas de Matemáticas Santillana (18 Cuadernos Completos)Antonio ValeraNo ratings yet
- 004-140 Linea de Envasado Gasificado Chiclayo PDFDocument13 pages004-140 Linea de Envasado Gasificado Chiclayo PDFJean Pool C SNo ratings yet
- El Futuro Del Mundo AutomotrizDocument154 pagesEl Futuro Del Mundo AutomotrizCharlygt500No ratings yet
- Presentación Common RailDocument60 pagesPresentación Common RailFranTSB0% (1)
- Investigacion2 CNCDocument13 pagesInvestigacion2 CNCAlejandro AlvarezNo ratings yet
- ElectricidadDocument114 pagesElectricidadIbrahim MouskiNo ratings yet
- El Convertidor de FrecuenciaDocument8 pagesEl Convertidor de FrecuenciaGonzalo CorralesNo ratings yet
- Nomenclatura ActualDocument19 pagesNomenclatura ActualGABRIELNo ratings yet
- Guia Tecnica 3 Sistema de FrenosDocument16 pagesGuia Tecnica 3 Sistema de FrenosDiego Alejandro Luengas TorresNo ratings yet
- Diagnóstico y Mantenimiento Al Sistema de Marcha MínimaDocument4 pagesDiagnóstico y Mantenimiento Al Sistema de Marcha MínimaElectronica OrionNo ratings yet
- Sensores automotrices: Clasificación y requerimientosDocument38 pagesSensores automotrices: Clasificación y requerimientosJesusAntonioPatrónAlamillaNo ratings yet
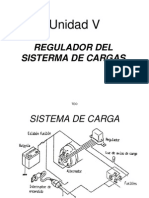
- Regulador de Carga Tristar MontajeDocument17 pagesRegulador de Carga Tristar MontajejohndoneNo ratings yet
- 1 Alternador - ElectronicaDocument21 pages1 Alternador - Electronicaisrael jorge torricoNo ratings yet
- Tratado de Electrónica Automotriz-Volumen 1-Electrónica Básica-Capítulo 1Document59 pagesTratado de Electrónica Automotriz-Volumen 1-Electrónica Básica-Capítulo 1putocalvoNo ratings yet
- Muestra Guia ChevroletDocument8 pagesMuestra Guia Chevroletenzo7259No ratings yet
- Asbesto en Los Tallers de VehiculosDocument18 pagesAsbesto en Los Tallers de VehiculosGonzaloNo ratings yet
- La guía práctica de dispositivos de libre-energía - Cómo funcionan los sistemas de Chas Campbell y Jacob ByzehrDocument9 pagesLa guía práctica de dispositivos de libre-energía - Cómo funcionan los sistemas de Chas Campbell y Jacob ByzehrAnibal Giron AbadNo ratings yet
- 06.d - Consideraciones Normativas para Tableros Protecciones y Tomacorrientes (Ticino)Document104 pages06.d - Consideraciones Normativas para Tableros Protecciones y Tomacorrientes (Ticino)joshNo ratings yet
- Electricidad AutomovilDocument27 pagesElectricidad AutomovilArturo AndradeNo ratings yet
- Valvula Iac - ControlDocument8 pagesValvula Iac - ControlGian Carlos Levano CanalesNo ratings yet
- Circuitos Básicos de Regulación Del Alternador de Carga de Las BateríasDocument1 pageCircuitos Básicos de Regulación Del Alternador de Carga de Las Bateríaspevare100% (1)
- HPCRDocument8 pagesHPCRBryand Romero'No ratings yet
- SOLICITUDDocument9 pagesSOLICITUDSoliz Miranda GonzaloNo ratings yet
- 3guía N°3 Alternador - 2018Document29 pages3guía N°3 Alternador - 2018Aaron Manuel David Marin MedinaNo ratings yet
- Modulo 2Document22 pagesModulo 2Israel GonzalesNo ratings yet
- Banco de Prueba Altrnadores de VoltajeDocument2 pagesBanco de Prueba Altrnadores de Voltajewatchmanlee9180No ratings yet
- Grasas SKFDocument4 pagesGrasas SKFcristianalonsoNo ratings yet
- GENPAR Catalogo Interactivo Marzo 2023 1Document216 pagesGENPAR Catalogo Interactivo Marzo 2023 1JESUS CORDOVANo ratings yet
- 07 Picanto ETACS PDFDocument17 pages07 Picanto ETACS PDFDarwin PerdomoNo ratings yet
- Motor de ArranqueDocument44 pagesMotor de ArranqueJesus MorenoNo ratings yet
- El AlternadorDocument36 pagesEl AlternadorluisitolokitodNo ratings yet
- Curso de Electricidad Del Automovil, SimbologiaDocument99 pagesCurso de Electricidad Del Automovil, Simbologiapolo16miNo ratings yet
- Válvula de InyecciónDocument2 pagesVálvula de InyecciónJC PinoNo ratings yet
- Construcción Kapagen JnaudinDocument24 pagesConstrucción Kapagen JnaudinFernando Hernandez50% (2)
- FINAL Circuitos de 24 Volts Ppt. CORREGIDODocument80 pagesFINAL Circuitos de 24 Volts Ppt. CORREGIDOEdwin Luis Shoke CunuranaNo ratings yet
- Prueba Al ReguladorDocument5 pagesPrueba Al ReguladorJimmy AlemanNo ratings yet
- Curso de Sistemas de Inyección DieselDocument508 pagesCurso de Sistemas de Inyección Dieselgustavo enriquez100% (1)
- Motosoldadura Kde18 EsDocument33 pagesMotosoldadura Kde18 EsAnonymous NYymdHgyNo ratings yet
- Contenido Manual PDFDocument197 pagesContenido Manual PDFFrederik Leonelli GierkeNo ratings yet
- Diagnostico Del Motor DieselDocument186 pagesDiagnostico Del Motor DieselTony Ramiro Soto Paucar100% (2)
- Vehiculos Hibridos en EcuadorDocument40 pagesVehiculos Hibridos en EcuadorGeovanny TandazoNo ratings yet
- Motores Asíncronos 40Document9 pagesMotores Asíncronos 40Andrés PinedaNo ratings yet
- Termistores NTC y PTC ..Document4 pagesTermistores NTC y PTC ..guido oscar huanca mamaniNo ratings yet
- Practica Calificada de BateriasDocument5 pagesPractica Calificada de BateriasCésar Cusi LazoNo ratings yet
- Presentación Estanque de ReservaDocument27 pagesPresentación Estanque de ReservaEnrico TondiniNo ratings yet
- Multiplexado y Diagnosis: CANbus, LIN, MOSTDocument52 pagesMultiplexado y Diagnosis: CANbus, LIN, MOSTTomas P AriasNo ratings yet
- Dossier BATERIES - Es PDFDocument13 pagesDossier BATERIES - Es PDFiloal1No ratings yet
- 11 Aplicacion Del 8051Document12 pages11 Aplicacion Del 8051Jordan Ordoño AguirreNo ratings yet
- Impresora Motores Paso A PasoDocument26 pagesImpresora Motores Paso A PasoneogatsNo ratings yet
- Motores paso a paso guíaDocument21 pagesMotores paso a paso guíaCarlos Rodrigo Carranza MatukNo ratings yet
- RR ArqMex Seris 2009Document6 pagesRR ArqMex Seris 2009Daniel Lidxi EnriquetoNo ratings yet
- Isla GuadalupeDocument23 pagesIsla GuadalupeDaniel Lidxi EnriquetoNo ratings yet
- OaxacaDocument162 pagesOaxacaDaniel Lidxi EnriquetoNo ratings yet
- Biodiversidad Ayuuk PDFDocument102 pagesBiodiversidad Ayuuk PDFDaniel Lidxi Enriqueto100% (1)
- Atlas Istmo PDFDocument150 pagesAtlas Istmo PDFDaniel Lidxi EnriquetoNo ratings yet
- ZMdel IstmoDocument2 pagesZMdel IstmoDaniel Lidxi EnriquetoNo ratings yet
- Suneo-La Verdad de Los HechosDocument120 pagesSuneo-La Verdad de Los HechosDaniel Lidxi EnriquetoNo ratings yet
- Carta Geologica Chiapas - TabascoDocument1 pageCarta Geologica Chiapas - TabascoCésar Leyva VNo ratings yet
- Whitepaper - Kinect para WindowsDocument3 pagesWhitepaper - Kinect para WindowsDaniel Lidxi EnriquetoNo ratings yet
- 1403 Briefing Eolicos PBIDocument5 pages1403 Briefing Eolicos PBIDaniel Lidxi EnriquetoNo ratings yet
- Isla GuadalupeDocument23 pagesIsla GuadalupeDaniel Lidxi EnriquetoNo ratings yet
- La Primera Ley BiológicaDocument18 pagesLa Primera Ley BiológicaDaniel Lidxi EnriquetoNo ratings yet
- Externo Practicantes 2013Document1 pageExterno Practicantes 2013Enrique CanalesNo ratings yet
- Como Te Llamas Nombres IndigenasDocument95 pagesComo Te Llamas Nombres Indigenasmaggiemoran100% (2)
- Libro ASMDocument193 pagesLibro ASMquique150No ratings yet
- Informe Final YaxchilanDocument19 pagesInforme Final YaxchilanDaniel Lidxi EnriquetoNo ratings yet
- Atlas Istmo PDFDocument150 pagesAtlas Istmo PDFDaniel Lidxi EnriquetoNo ratings yet
- Decreto - Calakmul - 121128Document380 pagesDecreto - Calakmul - 121128Daniel Lidxi EnriquetoNo ratings yet
- CKBR SpaDocument14 pagesCKBR SpaEdgar HernándezNo ratings yet
- Popolo CasDocument62 pagesPopolo CasEric MarquezNo ratings yet
- PCyM Petenes 2006Document1 pagePCyM Petenes 2006Daniel Lidxi EnriquetoNo ratings yet
- Machuca ProyectosDocument35 pagesMachuca ProyectosDaniel Lidxi EnriquetoNo ratings yet
- Lenguas e Identidades en Los AndesDocument426 pagesLenguas e Identidades en Los Andesarielm30No ratings yet
- Grupos Etnicos de Mexico. Triquis PDFDocument50 pagesGrupos Etnicos de Mexico. Triquis PDFLuigy SieteNo ratings yet
- Calendario Escolar UNISTMO 2013-2014Document1 pageCalendario Escolar UNISTMO 2013-2014Daniel Lidxi EnriquetoNo ratings yet
- OaxacaDocument1,234 pagesOaxacaDaniel Lidxi EnriquetoNo ratings yet
- Mixtecos en FronteraDocument58 pagesMixtecos en FronteraMrs. JiustonNo ratings yet