You might also like
- Micropumps For Drug Delivery: Eric Chappel and Dimitry Dumont-FillonDocument31 pagesMicropumps For Drug Delivery: Eric Chappel and Dimitry Dumont-FillonAnanya RoyNo ratings yet
- VIII Pump fabrication1-s2.0-S092442471000049X-mainDocument5 pagesVIII Pump fabrication1-s2.0-S092442471000049X-mainrajaram huptaNo ratings yet
- A Ferrofluidic Magnetic MicropumpDocument7 pagesA Ferrofluidic Magnetic MicropumprobertNo ratings yet
- Surface Micromachined Electrostatically Actuated Micro Peristaltic PumpDocument7 pagesSurface Micromachined Electrostatically Actuated Micro Peristaltic PumpAman SainiNo ratings yet
- Microelectro Mechanical Systems Assignment Ra 11Document14 pagesMicroelectro Mechanical Systems Assignment Ra 11Vengenzz VickyNo ratings yet
- 2014 JMM AC PublishedDocument14 pages2014 JMM AC PublishedRENO PANGESTUNo ratings yet
- 03 S & A Development of A Novel EM Pump For BiomedicalDocument6 pages03 S & A Development of A Novel EM Pump For Biomedicalmkilani77No ratings yet
- An Investigation of Electrowettingbased MicroactuationDocument10 pagesAn Investigation of Electrowettingbased MicroactuationTeferiNo ratings yet
- A Valveless Piezoelectric Micropump Based On Projection Micro Litho Stereo Exposure TechnologyDocument8 pagesA Valveless Piezoelectric Micropump Based On Projection Micro Litho Stereo Exposure TechnologyJulio CaveroNo ratings yet
- Modelling, Analysis and Simulation of The Piezoelectric Micro PumpDocument9 pagesModelling, Analysis and Simulation of The Piezoelectric Micro PumpadeijNo ratings yet
- Group 8 Report Micro PumpsDocument5 pagesGroup 8 Report Micro PumpsshirishkrishnaNo ratings yet
- A Thermal Bubble ActuatedDocument7 pagesA Thermal Bubble ActuatedKemis LegiNo ratings yet
- A Piezoelectric Microvalve For Compact High-Frequency, High-Differential Pressure Hydraulic Micropumping SystemsDocument12 pagesA Piezoelectric Microvalve For Compact High-Frequency, High-Differential Pressure Hydraulic Micropumping SystemsMaghfirah PajuNo ratings yet
- A Review On Passive Microvalves and Their Application.: Wasif AlamDocument4 pagesA Review On Passive Microvalves and Their Application.: Wasif AlamWasif AlamNo ratings yet
- Lab Report 3 (EXP3)Document15 pagesLab Report 3 (EXP3)Jamiel Catapang100% (1)
- Metal Additive Manufacturing of A High Pressure Micro Pump - 2013 - Procedia CIRDocument6 pagesMetal Additive Manufacturing of A High Pressure Micro Pump - 2013 - Procedia CIRNayra MarchioliNo ratings yet
- Pumping MechanismsDocument10 pagesPumping MechanismsfuggaNo ratings yet
- 02 JMM Development & Testing of Synchronous MicopumpDocument9 pages02 JMM Development & Testing of Synchronous Micopumpmkilani77No ratings yet
- A Controllable and Integrated Pump-Enabled Microfluidic Chip and Its Application in Droplets GeneratingDocument8 pagesA Controllable and Integrated Pump-Enabled Microfluidic Chip and Its Application in Droplets GeneratingAfshaNo ratings yet
- Recent Advances in Synthetic Micro Reaction TechnologyDocument25 pagesRecent Advances in Synthetic Micro Reaction TechnologyrajdewaanNo ratings yet
- Static and Dynamic Flow Simulation of A Koh-Etched Micro ValveDocument4 pagesStatic and Dynamic Flow Simulation of A Koh-Etched Micro ValveWasif AlamNo ratings yet
- Development of A New Type of Capsule MicropumpDocument6 pagesDevelopment of A New Type of Capsule MicropumpPappu S D NiluNo ratings yet
- Lifting of Water by Using Simple Pendulum With Solar EnergyDocument6 pagesLifting of Water by Using Simple Pendulum With Solar EnergyVeljko MilkovicNo ratings yet
- Stretchable Pumps For Soft Machines PDFDocument13 pagesStretchable Pumps For Soft Machines PDFSantosh MiryalaNo ratings yet
- Fluid Lab 2Document23 pagesFluid Lab 2Wong Wei HaoNo ratings yet
- Conf CM11Document12 pagesConf CM11Diogo CoelhoNo ratings yet
- Lab 6Document31 pagesLab 6mmmd.krmv.00No ratings yet
- Modeling and Simulation of A Micro Pump and Its PerformanceDocument15 pagesModeling and Simulation of A Micro Pump and Its PerformancemrahmedNo ratings yet
- 1-S2.0-0003497595010467-Main Cora PumpDocument6 pages1-S2.0-0003497595010467-Main Cora Pumpr.dafornoNo ratings yet
- (2017) Ehsani, A., Nejat, A.Document17 pages(2017) Ehsani, A., Nejat, A.Fattah Maulana AlanNo ratings yet
- AComprehensive Studyof Micropumps TechnologiesDocument17 pagesAComprehensive Studyof Micropumps TechnologiesmrahmedNo ratings yet
- Group 3: Micropumps and MicrovalvesDocument20 pagesGroup 3: Micropumps and MicrovalvesPhenias ManyashaNo ratings yet
- MEMS Sensors ActuatorsDocument15 pagesMEMS Sensors ActuatorsPraveengouda PatilNo ratings yet
- Microfluidics: An Introduction: Colloquium Topic 4Document9 pagesMicrofluidics: An Introduction: Colloquium Topic 4RaghavNo ratings yet
- Mt6603 Dms Unt 3Document24 pagesMt6603 Dms Unt 3Karthi KeyanNo ratings yet
- Jung 2015 J. Micromech. Microeng. 25 125004Document11 pagesJung 2015 J. Micromech. Microeng. 25 125004lcastillo27No ratings yet
- Development of Low-Cost Pressure Control Type Quasi-Servo Valve Using Embedded ControllerDocument8 pagesDevelopment of Low-Cost Pressure Control Type Quasi-Servo Valve Using Embedded ControllerbrgrNo ratings yet
- Venturi-Based Two-Layer Microfluidic Pumping SystemDocument3 pagesVenturi-Based Two-Layer Microfluidic Pumping SystemManu Ele100% (1)
- Fluid Mechanics Lab-I (Report)Document18 pagesFluid Mechanics Lab-I (Report)Mohammad Usman HabibNo ratings yet
- Modification & Development of Dual Side Water Pumping System Using Solar Energy With Scotch Yoke MechanismDocument12 pagesModification & Development of Dual Side Water Pumping System Using Solar Energy With Scotch Yoke MechanismMohammed Shakeel khudusNo ratings yet
- Microfluidic PumpsDocument25 pagesMicrofluidic PumpsAnonymous bjD4fCiNo ratings yet
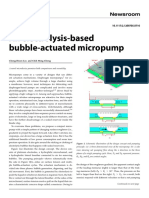
- An Electrolysis-Based Bubble-Actuated Micropump: Cheng-Hsien Liu and Chih Ming ChengDocument3 pagesAn Electrolysis-Based Bubble-Actuated Micropump: Cheng-Hsien Liu and Chih Ming ChengSoji AdimulaNo ratings yet
- A Magnetorheological Hydraulic Actuator Driven by A PiezopumpDocument12 pagesA Magnetorheological Hydraulic Actuator Driven by A PiezopumpguruprasadNo ratings yet
- Microbial Fuel Cell Electric BehaviourDocument3 pagesMicrobial Fuel Cell Electric BehaviourYOLANDANo ratings yet
- A State-Of-The-Art Review of Mixing in Microfluidic MixersDocument14 pagesA State-Of-The-Art Review of Mixing in Microfluidic MixersMatteo RizzottoNo ratings yet
- A Multidrug Delivery System Using A Piezoelectrically Actuated Silicon Valve Manifold With Embedded SensorsDocument8 pagesA Multidrug Delivery System Using A Piezoelectrically Actuated Silicon Valve Manifold With Embedded SensorsMobin Thomas AbrahamNo ratings yet
- Design of Hydraulic Piezoelectric PumpDocument4 pagesDesign of Hydraulic Piezoelectric PumpdhineshpNo ratings yet
- Kbiswas,+14399776 2002 10781125Document12 pagesKbiswas,+14399776 2002 10781125Zhenyu PanNo ratings yet
- Anti Vortex Device To Operate Pump Intakes Below The Minimum SubmDocument10 pagesAnti Vortex Device To Operate Pump Intakes Below The Minimum SubmDAVOOD FAZILATNo ratings yet
- Microfluidics Meets MEMS: Elisabeth Verpoorte Nico F. de RooijDocument24 pagesMicrofluidics Meets MEMS: Elisabeth Verpoorte Nico F. de RooijArunNo ratings yet
- Chapter 02Document3 pagesChapter 02Robert Kerwick100% (2)
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideFrom EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideRating: 4 out of 5 stars4/5 (8)
- Control Engineering Practice: W. Kemmetm Uller, F. Fuchshumer, A. KugiDocument10 pagesControl Engineering Practice: W. Kemmetm Uller, F. Fuchshumer, A. KugimitevNo ratings yet
- MEMS With Microactuators - by SayyanDocument17 pagesMEMS With Microactuators - by SayyansayyanNo ratings yet
- Development of A Multi-Pump Test Rig: Background of The StudyDocument58 pagesDevelopment of A Multi-Pump Test Rig: Background of The StudyMarc Danielle G Josue IINo ratings yet
- Polymer MEMS ActuatorsDocument9 pagesPolymer MEMS ActuatorsAmir ReuvenyNo ratings yet
- Paper Sucker RodDocument8 pagesPaper Sucker RodAchmad Hairil100% (1)
- BFP ProblemsDocument10 pagesBFP ProblemsShameer Majeed100% (2)
- VibrationDocument31 pagesVibrationAlfin CNo ratings yet
- FINAL-MANUSCRIPT-test RigDocument34 pagesFINAL-MANUSCRIPT-test RigMarc Danielle G Josue IINo ratings yet
- To Whomsoever It May ConcernDocument1 pageTo Whomsoever It May ConcerndhruvitshahNo ratings yet
- To Whom It May Concern: During The Period of His Assignment, We Found Him Sincere, Hardworking and A Keen LearnerDocument1 pageTo Whom It May Concern: During The Period of His Assignment, We Found Him Sincere, Hardworking and A Keen LearnerDarshan C ReddyNo ratings yet
- Work Exp CertificateDocument1 pageWork Exp CertificateJagadeesh KundrapuNo ratings yet
- To Whom It May Concern: During The Period of His Assignment, We Found Him Sincere, Hardworking and A Keen LearnerDocument1 pageTo Whom It May Concern: During The Period of His Assignment, We Found Him Sincere, Hardworking and A Keen LearnerDarshan C ReddyNo ratings yet
- Aboutفا Arithmetic Operators.helpDocument9 pagesAboutفا Arithmetic Operators.helpUrdu SahafatNo ratings yet
- The Nie RajaDocument1 pageThe Nie RajaChandra SekarNo ratings yet
- Experience CertificateDocument1 pageExperience CertificateChandra SekarNo ratings yet
- Ravishankar PackersDocument1 pageRavishankar PackersChandra SekarNo ratings yet
- Paramveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Document3 pagesParamveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Chandra SekarNo ratings yet
- RamDocument1 pageRamChandra SekarNo ratings yet
- SubharamaniyanDocument1 pageSubharamaniyanChandra SekarNo ratings yet
- MuruganDocument1 pageMuruganChandra SekarNo ratings yet
- Sent Hil KumarDocument1 pageSent Hil KumarChandra SekarNo ratings yet
- Selvam Packers & Movers: 130, Narayanan Nagar, Salem - 636008Document1 pageSelvam Packers & Movers: 130, Narayanan Nagar, Salem - 636008Chandra SekarNo ratings yet
- ShankarDocument1 pageShankarChandra SekarNo ratings yet
- Log in SheetDocument2 pagesLog in SheetChandra SekarNo ratings yet
- Ramani Packers & Movers: 4 Roads, Omalur Main Road, Salem - 636007Document2 pagesRamani Packers & Movers: 4 Roads, Omalur Main Road, Salem - 636007Chandra SekarNo ratings yet
- Played For Namakkal District As A Volley Ball Player HobbiesDocument2 pagesPlayed For Namakkal District As A Volley Ball Player HobbiesChandra SekarNo ratings yet
- Log in SheetDocument2 pagesLog in SheetChandra SekarNo ratings yet
- Synopsis Introduction To Press Tools and Power Press Pneumatic SystemsDocument1 pageSynopsis Introduction To Press Tools and Power Press Pneumatic SystemsChandra SekarNo ratings yet
- RajaDocument4 pagesRajaChandra SekarNo ratings yet
- VasuDocument1 pageVasuChandra SekarNo ratings yet
- ABSTRACTDocument1 pageABSTRACTChandra SekarNo ratings yet
- Gear Cutting Attachment For Small Lathes 209Document2 pagesGear Cutting Attachment For Small Lathes 209Chandra SekarNo ratings yet
- S.N O. Material Price/Ton in Rs. First Look: Propriet orDocument2 pagesS.N O. Material Price/Ton in Rs. First Look: Propriet orChandra SekarNo ratings yet
- Paramveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Document3 pagesParamveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Chandra SekarNo ratings yet
- Paramveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Document3 pagesParamveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Chandra SekarNo ratings yet
- Accident AlertDocument35 pagesAccident AlertChandra SekarNo ratings yet
- A4.fabrication of Solar Fan.Document2 pagesA4.fabrication of Solar Fan.Chandra SekarNo ratings yet
- Et0077 Fabricationofsolaroperatedpneumaticreciprocatingwaterpumpingsystem 131231213315 Phpapp01Document78 pagesEt0077 Fabricationofsolaroperatedpneumaticreciprocatingwaterpumpingsystem 131231213315 Phpapp01Chandra SekarNo ratings yet
- Seal Installation Manual Seal Installation Manual: Required SpaceDocument3 pagesSeal Installation Manual Seal Installation Manual: Required SpacekiranNo ratings yet
- Pump Technology Screwpumps l2 Series enDocument11 pagesPump Technology Screwpumps l2 Series enCamiloHernándezNo ratings yet
- ARMY TM 5-814-2 AIR FORCE AFM 88-11, Vol. 2Document32 pagesARMY TM 5-814-2 AIR FORCE AFM 88-11, Vol. 2MuhammadUsmanNo ratings yet
- Fluid Level Shots To Optimize Chemical Treatment ProgramsDocument15 pagesFluid Level Shots To Optimize Chemical Treatment ProgramsWilliam100% (1)
- Pump PPM ChecklistDocument4 pagesPump PPM ChecklistAjay VarmaNo ratings yet
- Operating Manual Infusomat Space PDFDocument82 pagesOperating Manual Infusomat Space PDFamirali.bme4527No ratings yet
- HCR L110 HD828 Type HD836 Type: Dimensions & WeightDocument2 pagesHCR L110 HD828 Type HD836 Type: Dimensions & WeightOthmanNo ratings yet
- Secondary Refrigerants: 10 Good Reasons To ChooseDocument1 pageSecondary Refrigerants: 10 Good Reasons To Chooserohitkb09No ratings yet
- An Oil TankerDocument30 pagesAn Oil TankerNIKHIL JASWAL100% (4)
- SpecificationsDocument4 pagesSpecificationsvipulNo ratings yet
- Hercules Horizontal Pumping SystemsDocument5 pagesHercules Horizontal Pumping SystemsArianeth BalcazarNo ratings yet
- Corlift Hydraulic Rod Pump System Flyer EnglishDocument1 pageCorlift Hydraulic Rod Pump System Flyer EnglishFaroukNo ratings yet
- 2.engine Fuel SystemDocument16 pages2.engine Fuel SystemSoeAyeNo ratings yet
- TSM-0066.PDF Spicer 24000Document104 pagesTSM-0066.PDF Spicer 24000Angel Dlsg90% (10)
- Types of Air Compressors PDFDocument4 pagesTypes of Air Compressors PDFRavi Tulsian0% (1)
- Condensate Recovery-Sales Brochure PDFDocument20 pagesCondensate Recovery-Sales Brochure PDFSasitharan MNo ratings yet
- EQUINORDocument34 pagesEQUINORBabacar DieyeNo ratings yet
- Pump User GuideDocument184 pagesPump User GuidecndmcNo ratings yet
- Milking Centre Design and Construction For Parlour Milking: Dairy HousingDocument8 pagesMilking Centre Design and Construction For Parlour Milking: Dairy HousingNara SilvestriNo ratings yet
- Piping Coordination SystemsDocument17 pagesPiping Coordination SystemsSyed FarhanNo ratings yet
- Flow Transmitter Promag BA055DENDocument178 pagesFlow Transmitter Promag BA055DENcysautsNo ratings yet
- Consult-Spec BIM Integrated DesignDocument62 pagesConsult-Spec BIM Integrated DesignMohammed O. Al-DushyNo ratings yet
- Funcionamento Dos Motores Volvo Penta D1-2-3-4-6Document90 pagesFuncionamento Dos Motores Volvo Penta D1-2-3-4-6Hugo Soberano100% (8)
- HY30 5513 M1 SparepartsDocument15 pagesHY30 5513 M1 SparepartsMohan CharanchathNo ratings yet
- ERCD Catalogue2013 enDocument276 pagesERCD Catalogue2013 enMarcelo Magalhães Quaiotti0% (1)
- Natural Gas DehydrationDocument29 pagesNatural Gas DehydrationMaulana Syamil BasayevNo ratings yet
- Pu Grouting SpecsDocument10 pagesPu Grouting Specsrowaters0% (1)
- Estimate For 2500 Cusec BagjolaDocument12 pagesEstimate For 2500 Cusec BagjolaTarunPatraNo ratings yet
- Axial Piston Pump Series PV: Variable DisplacementDocument32 pagesAxial Piston Pump Series PV: Variable DisplacementGyanaranjan NayakNo ratings yet
- Stainless Steel Vertical Multi-Stage Centrifugal Pump EvmrDocument4 pagesStainless Steel Vertical Multi-Stage Centrifugal Pump EvmrDang Nguyen VuNo ratings yet