You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- What Is Difference Between Maritime Survey N InspectionDocument1 pageWhat Is Difference Between Maritime Survey N InspectionAjay SinghNo ratings yet
- Basic Notes Laptops Repair - 1Document255 pagesBasic Notes Laptops Repair - 1nafees100% (3)
- ELD ICD Development HandbookDocument64 pagesELD ICD Development HandbookMohammad Zakir HossainNo ratings yet
- Application of AI To PetrophysicsDocument1 pageApplication of AI To PetrophysicsjombibiNo ratings yet
- The Apparent Solar TimeDocument3 pagesThe Apparent Solar TimeAjay SinghNo ratings yet
- Indian Holiday ResortsDocument4 pagesIndian Holiday ResortsAjay SinghNo ratings yet
- B SC (Nautical)Document161 pagesB SC (Nautical)Ajay SinghNo ratings yet
- ASM June 2019 ISM ManualDocument10 pagesASM June 2019 ISM ManualAjay Singh100% (1)
- Anchoring and What Precautions To TakeDocument2 pagesAnchoring and What Precautions To Takevikrami100% (2)
- Technical Specification DP SystemDocument48 pagesTechnical Specification DP SystemAjay SinghNo ratings yet
- Equipment No Na08 Echo SounderDocument2 pagesEquipment No Na08 Echo SounderAjay SinghNo ratings yet
- Emergency Towing Procedures Required For All ShipsDocument2 pagesEmergency Towing Procedures Required For All ShipsAjay Singh100% (1)
- First Aid KitDocument1 pageFirst Aid KitAjay SinghNo ratings yet
- Procedure For Transmiting Designated VHF DSC Distress Alert From FurunoDocument1 pageProcedure For Transmiting Designated VHF DSC Distress Alert From FurunoAjay SinghNo ratings yet
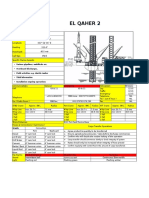
- ElQaher 2 Data CardDocument1 pageElQaher 2 Data CardAjay SinghNo ratings yet
- Equipment No 25 & 26Document2 pagesEquipment No 25 & 26Ajay SinghNo ratings yet
- EQUIPMENT No NA12 Speed Log RepeaterDocument2 pagesEQUIPMENT No NA12 Speed Log RepeaterAjay SinghNo ratings yet
- Equipment No Na19 Magnetic CompasDocument2 pagesEquipment No Na19 Magnetic CompasAjay SinghNo ratings yet
- Equipment No - Na13: Routine Checks Date Last Done Due Date RemarksDocument2 pagesEquipment No - Na13: Routine Checks Date Last Done Due Date RemarksAjay SinghNo ratings yet
- Equipment No Na18 AisDocument2 pagesEquipment No Na18 AisAjay SinghNo ratings yet
- Equipment No Na01 RadarDocument2 pagesEquipment No Na01 RadarAjay SinghNo ratings yet
- Equipment No Gm11 Fleet f77Document2 pagesEquipment No Gm11 Fleet f77Ajay SinghNo ratings yet
- Equipment No Na16&Na17 AnemometerDocument2 pagesEquipment No Na16&Na17 AnemometerAjay SinghNo ratings yet
- Equipment No GM 06 08vhf IcomDocument2 pagesEquipment No GM 06 08vhf IcomAjay SinghNo ratings yet
- Equipment No - Gm10: Routine Checks Date Last Done Due Date RemarksDocument2 pagesEquipment No - Gm10: Routine Checks Date Last Done Due Date RemarksAjay SinghNo ratings yet
- Equipment No - Gm02: Routine Checks Date Last Done Due Date RemarksDocument2 pagesEquipment No - Gm02: Routine Checks Date Last Done Due Date RemarksAjay SinghNo ratings yet
- Equipment No Sg01 Aldis LampDocument2 pagesEquipment No Sg01 Aldis LampAjay SinghNo ratings yet
- Equipment No Gm03 & Gm04 VHFDocument2 pagesEquipment No Gm03 & Gm04 VHFAjay SinghNo ratings yet
- Equipment No - Gm09: Routine Checks Date Last Done Due Date RemarksDocument2 pagesEquipment No - Gm09: Routine Checks Date Last Done Due Date RemarksAjay SinghNo ratings yet
- Equipment No Gm07 Inmarsat CDocument2 pagesEquipment No Gm07 Inmarsat CAjay SinghNo ratings yet
- EQUIPMENT No Fascimile Receiver GM08Document2 pagesEQUIPMENT No Fascimile Receiver GM08Ajay SinghNo ratings yet
- SalesforceCanvasAdapterforTableau (Sparkler) v1-04Document55 pagesSalesforceCanvasAdapterforTableau (Sparkler) v1-04robingroverNo ratings yet
- Education: - Python, HTML5Document1 pageEducation: - Python, HTML5Nikhil Sharma RayaproluNo ratings yet
- Advanced R: Hadley WickhamDocument15 pagesAdvanced R: Hadley WickhamRohit SinghNo ratings yet
- KAUSTUBHDocument10 pagesKAUSTUBHAbhishekNo ratings yet
- Nuke 6.1v1 ReleasenotesDocument23 pagesNuke 6.1v1 ReleasenotesamibokaNo ratings yet
- Oracle OAF Introduction - by Dinesh Kumar SDocument163 pagesOracle OAF Introduction - by Dinesh Kumar Sdineshcse86gmailcomNo ratings yet
- Oracle Application Express: Tutorial: Building An Application Release 5.1Document98 pagesOracle Application Express: Tutorial: Building An Application Release 5.1Mardonio Jr Mangaser AgustinNo ratings yet
- WinCC Flexible SQL Datenbank enDocument30 pagesWinCC Flexible SQL Datenbank engj42107No ratings yet
- STM32F103xx Reference ManualDocument679 pagesSTM32F103xx Reference Manuallnguyen_237557No ratings yet
- ITC Lab 14 Section ADocument4 pagesITC Lab 14 Section AMuhammad FahadNo ratings yet
- Reading PDS Thru COBOL CodeDocument4 pagesReading PDS Thru COBOL CodeDeepak RawatNo ratings yet
- Ram Luitel: 221 S OAK AVE # 4, AMES, IA, 50010 515-735-2357 RLUITEL@IASTATE - EDUDocument1 pageRam Luitel: 221 S OAK AVE # 4, AMES, IA, 50010 515-735-2357 RLUITEL@IASTATE - EDUapi-377864784No ratings yet
- PTS HSM Technical FAQs v3 Nov 2018Document23 pagesPTS HSM Technical FAQs v3 Nov 2018Rifat Hasif PutrafebrianNo ratings yet
- Log4j PPTDocument58 pagesLog4j PPTMukesh KumarNo ratings yet
- The Posting Date For Period 2011 For Payroll Area SP Is Not MaintainedDocument2 pagesThe Posting Date For Period 2011 For Payroll Area SP Is Not MaintainedNisha KhandelwalNo ratings yet
- Ultra Librarian Zuken Process Free ReaderDocument9 pagesUltra Librarian Zuken Process Free Readerviet phuong huynhNo ratings yet
- ADO ConnectionDocument3 pagesADO ConnectionMehtaz ShirinNo ratings yet
- Java QuestionsDocument43 pagesJava QuestionspmjoshirNo ratings yet
- Assignment For ISO27001 ConsultantDocument17 pagesAssignment For ISO27001 ConsultantArrazaq ZakariaNo ratings yet
- Online Voting System (Android Application) : Shruti Thakkar, Nisha Pawar, Nikita Sarang, Prof - Vijaylaxmi KadrolliDocument4 pagesOnline Voting System (Android Application) : Shruti Thakkar, Nisha Pawar, Nikita Sarang, Prof - Vijaylaxmi KadrolliTriono HidayatNo ratings yet
- Docu47002 Unisphere For VMAX 1.6 REST API Programmer's GuideDocument38 pagesDocu47002 Unisphere For VMAX 1.6 REST API Programmer's Guideccpatel_in4664No ratings yet
- System Administrative CommandsDocument1,449 pagesSystem Administrative Commandsapi-26403048No ratings yet
- XML TagsDocument8 pagesXML TagsSuneelTejNo ratings yet
- Lecture-1 TO Object Oriented Programming System (Oops)Document35 pagesLecture-1 TO Object Oriented Programming System (Oops)vaibhavNo ratings yet
- Archgon - MH-3621-U3 - ManualDocument14 pagesArchgon - MH-3621-U3 - ManualaimizaNo ratings yet
- Method Overloading ProgramDocument1 pageMethod Overloading ProgramleelaNo ratings yet
- Angular Training OutlineDocument4 pagesAngular Training OutlineAhmed CilmiNo ratings yet