You might also like
- Paisajismo RenacentistaDocument6 pagesPaisajismo RenacentistaEddie Bosantes50% (2)
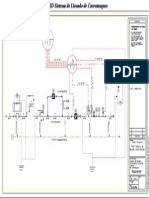
- Plano ProyectoDocument1 pagePlano ProyectoWilliam Zamir MuñozNo ratings yet
- Laboratorio Fisica EquipotencialesDocument10 pagesLaboratorio Fisica EquipotencialesWilliam Zamir MuñozNo ratings yet
- Combin y PermutDocument2 pagesCombin y PermutWilliam Zamir MuñozNo ratings yet
- Integrales y Dist. NormalDocument6 pagesIntegrales y Dist. NormalWilliam Zamir MuñozNo ratings yet
- Partes Unidad LACTDocument3 pagesPartes Unidad LACTWilliam Zamir Muñoz0% (1)
- Puesta A TierraDocument98 pagesPuesta A Tierracesar_augusto_1965No ratings yet
- Liquidos PenetrantesDocument8 pagesLiquidos PenetrantesWilliam Zamir Muñoz0% (1)
- Tabla de Aatm A53 y Astm A106Document1 pageTabla de Aatm A53 y Astm A106Willians Aguilar100% (4)
- Redalyc: Lozano Díaz, AntoniaDocument5 pagesRedalyc: Lozano Díaz, AntoniaWilliam Zamir MuñozNo ratings yet
- Bioetica y Avances TecnologicosDocument7 pagesBioetica y Avances TecnologicosWilliam Zamir MuñozNo ratings yet
- IncineracionDocument43 pagesIncineracionWilliam Zamir MuñozNo ratings yet
- Manual Estadistica PDFDocument91 pagesManual Estadistica PDFCeies Salud HnymNo ratings yet
- Acero SISA 4140RDocument1 pageAcero SISA 4140RWilliam Zamir MuñozNo ratings yet
- Campo MagneticoDocument2 pagesCampo MagneticoWilliam Zamir MuñozNo ratings yet
- Wikcionario 1000 A 5000 Palabras de Uso Más FrecuenteDocument65 pagesWikcionario 1000 A 5000 Palabras de Uso Más Frecuentenagual2002No ratings yet
- Tarea 3 - Sistemas de Ecuaciones LinealesDocument9 pagesTarea 3 - Sistemas de Ecuaciones LinealesMARIA CAMILA VILLA MONTOYANo ratings yet
- Manual-Balanza Estacionaria de Control de PesoDocument9 pagesManual-Balanza Estacionaria de Control de PesoJosé SandovalNo ratings yet
- Pictogramas de SeguridadDocument5 pagesPictogramas de Seguridadclauremarializ99No ratings yet
- TEMA No.5 BALANZA DE PAGOSDocument4 pagesTEMA No.5 BALANZA DE PAGOSJosmir GarciaNo ratings yet
- Unidades Condensadoras BitzerDocument6 pagesUnidades Condensadoras BitzerSantiago ValenciaNo ratings yet
- Ficha Tecnica de Identificacion de Trastornos 6Document2 pagesFicha Tecnica de Identificacion de Trastornos 6Estefany SánchezNo ratings yet
- STATE FARM Comprehensive ENG - SPA Glossary 2019 - 1686312021Document76 pagesSTATE FARM Comprehensive ENG - SPA Glossary 2019 - 1686312021RAUL RAMIREZ100% (1)
- Recepción y Almacenamiento de Materia PrimaDocument11 pagesRecepción y Almacenamiento de Materia PrimaalcidesNo ratings yet
- Cronograma de Anatomia de Cabeza y Cuello para Estudiantes 2011Document3 pagesCronograma de Anatomia de Cabeza y Cuello para Estudiantes 2011Mario BownstherNo ratings yet
- Taller de FQ-Amb-GasesDocument4 pagesTaller de FQ-Amb-GasesmaiNo ratings yet
- Tarea DibujoDocument13 pagesTarea DibujoNiko Hernandez SalinasNo ratings yet
- Proyecto Arenas Ecosistemas Uruguayos PDFDocument337 pagesProyecto Arenas Ecosistemas Uruguayos PDFEmilia HJNo ratings yet
- Bloque 3 Segunda ParteDocument116 pagesBloque 3 Segunda PartejaiderNo ratings yet
- Guia BioseguridadDocument19 pagesGuia BioseguridadmarleneNo ratings yet
- 09 - Arcillas y RX Sedimentarias PDFDocument88 pages09 - Arcillas y RX Sedimentarias PDFjohan velizNo ratings yet
- Variantes Climáticos de La Rep. DomDocument10 pagesVariantes Climáticos de La Rep. DomRoma LawrenceNo ratings yet
- R4Document7 pagesR4quiquebravoNo ratings yet
- Red Velvet (YoonMin)Document97 pagesRed Velvet (YoonMin)Blue MoonNo ratings yet
- TB-M01 Manual de TecnovigilanciaDocument38 pagesTB-M01 Manual de TecnovigilanciaJavi Armando SalamancaNo ratings yet
- Sse Al T09 DesigualdadesDocument22 pagesSse Al T09 DesigualdadesFranklin Muñoz PalominoNo ratings yet
- Formulario para La Devolucion de Equipo Por Retiro o Desercion Del LiceoDocument2 pagesFormulario para La Devolucion de Equipo Por Retiro o Desercion Del LiceoJose ManzanarezNo ratings yet
- Balanza JuguetonaDocument4 pagesBalanza JuguetonaPaolaMejiaCcahuanaNo ratings yet
- Especificaciones Técnicas LechadasDocument12 pagesEspecificaciones Técnicas LechadasJohn VergaraNo ratings yet
- Tarea 1 NeuropsicologiaDocument5 pagesTarea 1 Neuropsicologialorena casadiegosNo ratings yet
- Tintes YelowDocument2 pagesTintes Yelowrompuente100% (3)
- Presentacion UruboDocument50 pagesPresentacion UruboEnrique De Menester100% (1)
- Metodo de Las DovelasDocument6 pagesMetodo de Las DovelasMonica Stephanie67% (3)
- Costo de MantenimientoDocument1 pageCosto de MantenimientoChapoñan Silva Juan CarlosNo ratings yet