You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- CobolDocument224 pagesCobolrahulravi007No ratings yet
- A Guide To The Preparation of Civil Engineering Drawing PDFDocument186 pagesA Guide To The Preparation of Civil Engineering Drawing PDFEraj100% (3)
- 12 Animation Q1 AnswerDocument38 pages12 Animation Q1 AnswerBilly Joe TanNo ratings yet
- What Is Axle CounterDocument23 pagesWhat Is Axle CounterPrabhat SharmaNo ratings yet
- PVC PLasticisersDocument2 pagesPVC PLasticisersKrishna PrasadNo ratings yet
- Microprocessor Architectures and Systems: RISC, CISC and DSPFrom EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPRating: 4 out of 5 stars4/5 (1)
- Delphi 9322a000Document5 pagesDelphi 9322a000BaytolgaNo ratings yet
- A320 CBT Test 1 PDFDocument107 pagesA320 CBT Test 1 PDFCesarNo ratings yet
- Curtis CatalogDocument9 pagesCurtis CatalogtharngalNo ratings yet
- GL Setup ListDocument88 pagesGL Setup ListSundaroraclefinNo ratings yet
- FMDS0129Document49 pagesFMDS0129hhNo ratings yet
- Section 15 QuadratureEncoderInterface (QEI)Document24 pagesSection 15 QuadratureEncoderInterface (QEI)Abraham MuñozNo ratings yet
- Section 15. Quadrature Encoder Interface (QEI) HighlightsDocument35 pagesSection 15. Quadrature Encoder Interface (QEI) HighlightsSourabh KhandelwalNo ratings yet
- Section 16. Quadrature Encoder Interface (QEI) Highlights 16 Encoder InterfaceDocument36 pagesSection 16. Quadrature Encoder Interface (QEI) Highlights 16 Encoder InterfaceSourabh KhandelwalNo ratings yet
- Data SheetDocument18 pagesData SheetDidit Andhika SubrataNo ratings yet
- Using Quadrature Encoders With E Series DAQ Boards: Application Note 084Document11 pagesUsing Quadrature Encoders With E Series DAQ Boards: Application Note 084Heriberto Flores AmpieNo ratings yet
- Econder MicrochipDocument12 pagesEconder MicrochipSandra MarkivNo ratings yet
- Datasheet m37512Document87 pagesDatasheet m37512ALFAKNo ratings yet
- Rotary EncoderDocument6 pagesRotary EncoderalesysNo ratings yet
- Avr ArchitectureDocument29 pagesAvr ArchitectureOdoch HerbertNo ratings yet
- Pourquoi Utilser Signal Conditioner LS7084Document4 pagesPourquoi Utilser Signal Conditioner LS7084bientinhxanhthamNo ratings yet
- HCTL 2017Document12 pagesHCTL 2017ivancho1070No ratings yet
- X7083, X7043 and X7023 Pulse GeneratorsDocument70 pagesX7083, X7043 and X7023 Pulse GeneratorskristechnikNo ratings yet
- Counters and Shift RegDocument24 pagesCounters and Shift RegRakesh Kumar D100% (1)
- RTU511Document9 pagesRTU511Sambit MohapatraNo ratings yet
- Dspic30F6010 Quadrature Encoder Interface (Qei) ModuleDocument14 pagesDspic30F6010 Quadrature Encoder Interface (Qei) ModuleSourabh KhandelwalNo ratings yet
- Report - RFid Based Security SystemDocument46 pagesReport - RFid Based Security SystemDhaval Rana50% (6)
- TMS320F2812-Analogue To Digital ConverterDocument26 pagesTMS320F2812-Analogue To Digital ConverterPantech ProLabs India Pvt LtdNo ratings yet
- 74163Document12 pages74163Obenelia MartinezNo ratings yet
- Parallel Timer InterfaceDocument13 pagesParallel Timer InterfaceRiham AbdallahNo ratings yet
- TP03 PLC Programming ManualDocument338 pagesTP03 PLC Programming ManualAjith KumarNo ratings yet
- Introduction To MSP430 MicrocontrollersDocument32 pagesIntroduction To MSP430 MicrocontrollersAlejandro OrtizNo ratings yet
- Three Digit BCD Counter MC1453B Data SheetDocument12 pagesThree Digit BCD Counter MC1453B Data Sheetmata1802No ratings yet
- 1 - Analog To Digital Conversion in LPC2129Document4 pages1 - Analog To Digital Conversion in LPC2129imbharteshNo ratings yet
- Power Point PresentationDocument17 pagesPower Point PresentationVNo ratings yet
- Lesson 14Document18 pagesLesson 14satsoexNo ratings yet
- Counter VHDLDocument12 pagesCounter VHDLbparthageneNo ratings yet
- CPR E 381x/382x Lab11aDocument10 pagesCPR E 381x/382x Lab11aHelenNo ratings yet
- Count and Registers GuideDocument31 pagesCount and Registers GuideBharadwaja PisupatiNo ratings yet
- Function/Function Block LibrariesDocument23 pagesFunction/Function Block LibrariesmasimeriseNo ratings yet
- AN #35 - Low Cost LCD Frequency MeterDocument6 pagesAN #35 - Low Cost LCD Frequency Meterarroyo62No ratings yet
- SAF7113H: 1. General DescriptionDocument75 pagesSAF7113H: 1. General DescriptionEbbanoFristsNo ratings yet
- PIC Simple Signal GeneratorDocument5 pagesPIC Simple Signal GeneratorDumindu JayawardeneNo ratings yet
- TRISC 0 // Set Direction To Be Output 0 Output 1 InputDocument7 pagesTRISC 0 // Set Direction To Be Output 0 Output 1 Inputiri_scribdNo ratings yet
- Unit 1 MPUOrganizationDocument90 pagesUnit 1 MPUOrganizationspam.me.adiNo ratings yet
- Vacon NXS NXP Mech Brake Control ASFIFF17 ApplicatDocument69 pagesVacon NXS NXP Mech Brake Control ASFIFF17 ApplicatTanuTiganuNo ratings yet
- Taxi Fare MeterDocument6 pagesTaxi Fare MeterJawad malik0% (2)
- ADC PPTDocument28 pagesADC PPTGaurav KhandelwalNo ratings yet
- Rohm Co LTD Bh1750 DatasheetDocument18 pagesRohm Co LTD Bh1750 DatasheetmehmetuguryalcinkayaNo ratings yet
- ATM Pocket Guide: For Your ATM Testing Needs Call 800.TEKELEC Visit Our Web Site atDocument14 pagesATM Pocket Guide: For Your ATM Testing Needs Call 800.TEKELEC Visit Our Web Site athemusairamNo ratings yet
- Ns16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosDocument24 pagesNs16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosNeimar HahmeierNo ratings yet
- Computer Instruction FormatsDocument16 pagesComputer Instruction FormatsJk RinkuNo ratings yet
- Microchip CRC Manual 2Document16 pagesMicrochip CRC Manual 2mordehainNo ratings yet
- Adc Lab Pic18Document23 pagesAdc Lab Pic18Bolarinwa Joseph100% (1)
- 74AC161-Synchronous Presettable Binary CounterDocument11 pages74AC161-Synchronous Presettable Binary CounterbmmostefaNo ratings yet
- Visual PLC: Indu Stry F IrstDocument14 pagesVisual PLC: Indu Stry F IrstPhan GiangNo ratings yet
- Timers of ATmega328PDocument26 pagesTimers of ATmega328PZaryab Khalil SiddiqueNo ratings yet
- CD4553 Datasheet OKDocument13 pagesCD4553 Datasheet OKCong ThoNo ratings yet
- Electronica - Servo Control of A Dc-Brush Motor An532Document89 pagesElectronica - Servo Control of A Dc-Brush Motor An532Ismael 8877No ratings yet
- Section 46. Scalable Comparator Module: HighlightsDocument14 pagesSection 46. Scalable Comparator Module: HighlightsjhonbastianNo ratings yet
- AN532 - Servo Control of A DC Brush Motor PDFDocument141 pagesAN532 - Servo Control of A DC Brush Motor PDFpierdonneNo ratings yet
- State Graphs For Control NetworksDocument37 pagesState Graphs For Control Networksashudiya100% (1)
- hcs12 Timer PDFDocument102 pageshcs12 Timer PDFAlvaro Rodriguez100% (1)
- Digital Conversion TechniquesDocument18 pagesDigital Conversion TechniquesSaad ShaikhNo ratings yet
- TrapezoidalDocument18 pagesTrapezoidalCarlos Alberto Venancio PerezNo ratings yet
- Balancing Robot SchematicDocument1 pageBalancing Robot SchematicCarlos Alberto Venancio PerezNo ratings yet
- RPMDocument18 pagesRPMCarlos Alberto Venancio PerezNo ratings yet
- Pid Control For DC Motor With Encoder For CNC AplicationsDocument49 pagesPid Control For DC Motor With Encoder For CNC AplicationsCarlos Alberto Venancio PerezNo ratings yet
- Pid Control For DC Motor With Encoder For CNC AplicationsDocument49 pagesPid Control For DC Motor With Encoder For CNC AplicationsCarlos Alberto Venancio PerezNo ratings yet
- Excel Dynamic Arrays: Department Item Quantity Price Total $Document5 pagesExcel Dynamic Arrays: Department Item Quantity Price Total $Bilal Hussein SousNo ratings yet
- Example 3 - S-Beam CrashDocument13 pagesExample 3 - S-Beam CrashSanthosh LingappaNo ratings yet
- 08 Candelaria Punta Del Cobre IOCG Deposits PDFDocument27 pages08 Candelaria Punta Del Cobre IOCG Deposits PDFDiego Morales DíazNo ratings yet
- NewsDocument26 pagesNewsMaria Jose Soliz OportoNo ratings yet
- PEE3-M Lec 1Document19 pagesPEE3-M Lec 1Ena Leanica DelgadoNo ratings yet
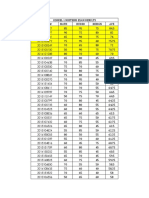
- Midterm Exam Result Ce199-1l 2Q1920Document3 pagesMidterm Exam Result Ce199-1l 2Q1920RA CarpioNo ratings yet
- Nso User Guide-5.3 PDFDocument178 pagesNso User Guide-5.3 PDFAla JebnounNo ratings yet
- Practical-10: AIM: Installing Active Directory and Creating AD ObjectsDocument4 pagesPractical-10: AIM: Installing Active Directory and Creating AD ObjectsnisuNo ratings yet
- Bobcat Technical Information Bulletin - CompressDocument2 pagesBobcat Technical Information Bulletin - Compressgerman orejarenaNo ratings yet
- CBSE Class 5 Mathematics Sample Paper Set NDocument4 pagesCBSE Class 5 Mathematics Sample Paper Set NRamanjeet KaurNo ratings yet
- HI-8592, HI-8593, HI-8594: Single-Rail ARINC 429 Differential Line DriverDocument14 pagesHI-8592, HI-8593, HI-8594: Single-Rail ARINC 429 Differential Line DriversameeppaiNo ratings yet
- Lecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanDocument18 pagesLecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanLaura AmwayiNo ratings yet
- Hydrocarbons NotesDocument15 pagesHydrocarbons Notesarjunrkumar2024No ratings yet
- Instrument Resume OIL and GAS.Document3 pagesInstrument Resume OIL and GAS.RTI PLACEMENT CELLNo ratings yet
- Design of Shaft Straightening MachineDocument58 pagesDesign of Shaft Straightening MachineChiragPhadkeNo ratings yet
- M.E. Comm. SystemsDocument105 pagesM.E. Comm. SystemsShobana SNo ratings yet
- Metacentric Height: From Wikipedia, The Free EncyclopediaDocument6 pagesMetacentric Height: From Wikipedia, The Free EncyclopediaВладимир ШевченкоNo ratings yet
- Introduction To Curve FittingDocument10 pagesIntroduction To Curve FittingscjofyWFawlroa2r06YFVabfbajNo ratings yet
- Gallium Nitride Materials and Devices IV: Proceedings of SpieDocument16 pagesGallium Nitride Materials and Devices IV: Proceedings of SpieBatiriMichaelNo ratings yet
- BetaDocument16 pagesBetaAkshita Saxena100% (2)
- Solution of Homework 4Document4 pagesSolution of Homework 4Kamalakar Reddy100% (2)