You might also like
- Padre Raniero Cantalamessa - Maria Meditaba en Su Corazon Todas Estas PalabrasDocument1 pagePadre Raniero Cantalamessa - Maria Meditaba en Su Corazon Todas Estas PalabrasAdriana Marquez GomezNo ratings yet
- Cuestionario NIA 315Document3 pagesCuestionario NIA 315Christopher Rodriguez100% (2)
- MelanogénesisDocument4 pagesMelanogénesisJeremias PalmeroNo ratings yet
- Comprensión Lectora 2Document6 pagesComprensión Lectora 2janeth33% (3)
- Modulo 3: Puerto Serie. Introducción Al Lenguaje CDocument51 pagesModulo 3: Puerto Serie. Introducción Al Lenguaje CJuan Gonzalez Gomez100% (1)
- Robots Libres e ImprimiblesDocument42 pagesRobots Libres e ImprimiblesJuan Gonzalez Gomez100% (1)
- 2010 10 29 Robots Modulares UCLMDocument43 pages2010 10 29 Robots Modulares UCLMJuan Gonzalez GomezNo ratings yet
- Transparencias. Desarrollo de Robots Modulares de Tipo Serpiente para Búsqueda y Rescate en Entornos UrbanosDocument16 pagesTransparencias. Desarrollo de Robots Modulares de Tipo Serpiente para Búsqueda y Rescate en Entornos UrbanosJuan Gonzalez GomezNo ratings yet
- 2010-04-14-Robots Ápodos Modulares-HispabotDocument40 pages2010-04-14-Robots Ápodos Modulares-HispabotJuan Gonzalez GomezNo ratings yet
- Robots Ápodos Modulares. Málaga-17/Jun/2010Document72 pagesRobots Ápodos Modulares. Málaga-17/Jun/2010Juan Gonzalez GomezNo ratings yet
- Desarrollo de Robots Modulares de Tipo Serpiente para Búsqueda y Rescate en Entornos UrbanosDocument20 pagesDesarrollo de Robots Modulares de Tipo Serpiente para Búsqueda y Rescate en Entornos UrbanosJuan Gonzalez GomezNo ratings yet
- Jugando Con Robots Modulares. Taller de Robotica. Campus Científico 2010Document28 pagesJugando Con Robots Modulares. Taller de Robotica. Campus Científico 2010Juan Gonzalez GomezNo ratings yet
- Robots ModularesDocument14 pagesRobots ModularesJuan Gonzalez GomezNo ratings yet
- Módulo 4: TemporizadoresDocument62 pagesMódulo 4: TemporizadoresJuan Gonzalez GomezNo ratings yet
- Modulo 9: Introducción A La Programación en ENSAMBLADORDocument32 pagesModulo 9: Introducción A La Programación en ENSAMBLADORJuan Gonzalez GomezNo ratings yet
- 2010-04-10-Robots modulares-UC3MDocument50 pages2010-04-10-Robots modulares-UC3MJuan Gonzalez GomezNo ratings yet
- Módulo 5: Displays de Cristal Líquido (LCD)Document27 pagesMódulo 5: Displays de Cristal Líquido (LCD)Juan Gonzalez GomezNo ratings yet
- Modulo 8: Control de ServosDocument18 pagesModulo 8: Control de ServosJuan Gonzalez Gomez100% (3)
- Modulo 10: Bus I2CDocument24 pagesModulo 10: Bus I2CJuan Gonzalez Gomez100% (1)
- Modulo 7: Memoria EepromDocument16 pagesModulo 7: Memoria EepromJuan Gonzalez GomezNo ratings yet
- Robótica Modular y Locomoción. URJC 2009Document58 pagesRobótica Modular y Locomoción. URJC 2009Juan Gonzalez Gomez100% (2)
- Módulo 6: Conversor Analógico/digitalDocument14 pagesMódulo 6: Conversor Analógico/digitalJuan Gonzalez GomezNo ratings yet
- Robótica Modular y Locomoción. UAM-2008Document41 pagesRobótica Modular y Locomoción. UAM-2008Juan Gonzalez GomezNo ratings yet
- Módulo 2: Puertos de E/S Digitales. Introducción Al Lenguaje C (I)Document48 pagesMódulo 2: Puertos de E/S Digitales. Introducción Al Lenguaje C (I)Juan Gonzalez Gomez100% (1)
- Módulo 1: Introducción Al PIC16F87xDocument19 pagesMódulo 1: Introducción Al PIC16F87xJuan Gonzalez GomezNo ratings yet
- Granja de Micro-Robots. Ebro Party 2007Document19 pagesGranja de Micro-Robots. Ebro Party 2007Juan Gonzalez GomezNo ratings yet
- Robótica Modular Libre. Itesca 2008Document38 pagesRobótica Modular Libre. Itesca 2008Juan Gonzalez GomezNo ratings yet
- Robótica Modular y Locomoción. UCLM 2009Document46 pagesRobótica Modular y Locomoción. UCLM 2009Juan Gonzalez Gomez100% (2)
- Demostración de Robots Modulares. Madridbot 2009Document16 pagesDemostración de Robots Modulares. Madridbot 2009Juan Gonzalez Gomez100% (2)
- Robótica Modular y Locomoción. (A.k.a Robótica Gusanil) - ARDE 2009Document38 pagesRobótica Modular y Locomoción. (A.k.a Robótica Gusanil) - ARDE 2009Juan Gonzalez Gomez100% (2)
- Robótica Modular y Locomoción: Aplicación A Robots ÁpodosDocument49 pagesRobótica Modular y Locomoción: Aplicación A Robots ÁpodosJuan Gonzalez GomezNo ratings yet
- Robótica Modular Libre. Iparty 2007Document43 pagesRobótica Modular Libre. Iparty 2007Juan Gonzalez GomezNo ratings yet
- Granja de Micro-Robots. Nebrija Party 2007Document23 pagesGranja de Micro-Robots. Nebrija Party 2007Juan Gonzalez GomezNo ratings yet
- Robótica Modular y Locomoción. Sicfima 2007Document42 pagesRobótica Modular y Locomoción. Sicfima 2007Juan Gonzalez Gomez100% (2)
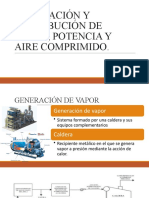
- Generación y Distribución de Vapor, Aire Comprimido y PotenciaDocument27 pagesGeneración y Distribución de Vapor, Aire Comprimido y PotenciaEliNo ratings yet
- J.C. Estenssoro-¿BicentenarioDocument6 pagesJ.C. Estenssoro-¿BicentenarioFlavi AlviteresNo ratings yet
- Conv ExcelDocument1 pageConv ExcelEricka PicoyNo ratings yet
- Bitacora Expoferia I-2023Document5 pagesBitacora Expoferia I-2023Yanelis Carolina Rodriguez RiveroNo ratings yet
- Ley Aduanera y Su ReglamentoDocument7 pagesLey Aduanera y Su ReglamentoLeight NealNo ratings yet
- Teran. Atando CabosDocument22 pagesTeran. Atando CabosPingoLimonNo ratings yet
- Exame Parcial 12-2015Document2 pagesExame Parcial 12-2015A ChNo ratings yet
- Minoridad y rehabilitación: Estudio crítico de las posibilidades rehabilitatorias de las prácticas judiciales actualesDocument356 pagesMinoridad y rehabilitación: Estudio crítico de las posibilidades rehabilitatorias de las prácticas judiciales actualesJuanGuillermoOjedaHernandezNo ratings yet
- Percepcion Remota PDFDocument34 pagesPercepcion Remota PDFAlex Joel MuñozNo ratings yet
- Trabajo Practico Laboratorio Nro 1 - Transitorio Metodo Clasico 2022Document4 pagesTrabajo Practico Laboratorio Nro 1 - Transitorio Metodo Clasico 2022Ramiro LescanoNo ratings yet
- Leccion 8 Agricultura y Ganaderia Derecho AgrarioDocument12 pagesLeccion 8 Agricultura y Ganaderia Derecho AgrarioGuillermo AdornoNo ratings yet
- El rol del psicólogo: una ciencia para comprender y mejorar la conducta humanaDocument21 pagesEl rol del psicólogo: una ciencia para comprender y mejorar la conducta humanaYusmely Barcenas VillalbaNo ratings yet
- Proceso Exportador ProchileDocument3 pagesProceso Exportador ProchileRojTap CarlosNo ratings yet
- FT PegacorceramicoDocument3 pagesFT PegacorceramicoMarcela ValentínNo ratings yet
- La Irresponsabilidad OrganizadaDocument2 pagesLa Irresponsabilidad Organizadanyni johanna lopez cortesNo ratings yet
- Acta Comite de Vigilancia Semana DIA 20-05-2021Document38 pagesActa Comite de Vigilancia Semana DIA 20-05-2021Alojamiento 204 BNo ratings yet
- Procedimiento Dispensacion de MedicamentoDocument7 pagesProcedimiento Dispensacion de MedicamentoEdwing MorenoNo ratings yet
- Trabajo Administracion FinancieraDocument4 pagesTrabajo Administracion FinancieraMirka CNo ratings yet
- CIDU 1 FASE 1.MODULO 2 Revista179 - S5ES ANUIESL PAGS. 25-39Document118 pagesCIDU 1 FASE 1.MODULO 2 Revista179 - S5ES ANUIESL PAGS. 25-39mariabelencapitanNo ratings yet
- Ufv 2023Document1 pageUfv 2023Condori RamiroNo ratings yet
- DocumentosDocument64 pagesDocumentosJunior Malele Mayube100% (1)
- 30139-S06-PPT 2021-01Document25 pages30139-S06-PPT 2021-01Hugo Enrique Oblitas SalinasNo ratings yet
- Manual TemperaturaDocument231 pagesManual TemperaturaErnesto Arzabala100% (1)
- Semana 3. AlgoritmiaDocument8 pagesSemana 3. Algoritmiayulissa aguirreNo ratings yet
- Fetotomias: procedimientos para reducir el volumen fetalDocument2 pagesFetotomias: procedimientos para reducir el volumen fetalLisbeth Alejandra Martínez GonzálezNo ratings yet
- Base de Datos NoSQLDocument23 pagesBase de Datos NoSQLstefaniNo ratings yet