You might also like
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Tips N Tricks-MicrochipDocument20 pagesTips N Tricks-Microchipbanana567No ratings yet
- UC3879Document9 pagesUC3879Christina Tio TrisnasariNo ratings yet
- EnphaseTechBrief Vdrop M250Document12 pagesEnphaseTechBrief Vdrop M250Lia SantosNo ratings yet
- AN665Document6 pagesAN665VIJAYPUTRANo ratings yet
- Microchip CLC DescriptionDocument12 pagesMicrochip CLC DescriptionKamlesh YadavNo ratings yet
- High Efficiency DC-DC Converters For Battery-Operated Systems With Energy ManagementDocument10 pagesHigh Efficiency DC-DC Converters For Battery-Operated Systems With Energy ManagementG_lenihanNo ratings yet
- Aerosemi: Features ApplicationsDocument9 pagesAerosemi: Features Applicationsttnaing100% (1)
- Viper22a Equivalent PDFDocument16 pagesViper22a Equivalent PDFXande Nane Silveira0% (1)
- Load Tap Changing Control - BeckwithDocument9 pagesLoad Tap Changing Control - BeckwithTarcisio FlávioNo ratings yet
- LTMag V19N1 02 LT3751 RobertMillikenDocument6 pagesLTMag V19N1 02 LT3751 RobertMillikenAshok Kumar100% (1)
- Inrush Current ControlDocument8 pagesInrush Current ControlbrahimNo ratings yet
- 5 Volts To 3.3Document3 pages5 Volts To 3.3pablorc30No ratings yet
- Buck Converter Design DemystifiedDocument6 pagesBuck Converter Design DemystifiedEric MorissetNo ratings yet
- 12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsDocument6 pages12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsThanos van RamNo ratings yet
- SW - Buck - 1 Application Report: Topology: Non Synchronous Buck Converter Controller: Texas Instruments TPS40200Document25 pagesSW - Buck - 1 Application Report: Topology: Non Synchronous Buck Converter Controller: Texas Instruments TPS40200Ion AvramNo ratings yet
- DC-DC Conversion Without Inductors: Charge Pumps-A General DescriptionDocument8 pagesDC-DC Conversion Without Inductors: Charge Pumps-A General Descriptionaustinlee0502No ratings yet
- Trabajo 2Document18 pagesTrabajo 2ing_pemNo ratings yet
- Automated Unified System For LPG UsingDocument84 pagesAutomated Unified System For LPG UsingVirat KaliNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument7 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- LM2621 Low Input Voltage, Step-Up DC-DC Converter: Features DescriptionDocument19 pagesLM2621 Low Input Voltage, Step-Up DC-DC Converter: Features DescriptionYuri ArietaNo ratings yet
- DS0026 Dual High-Speed MOS Driver: General Description FeaturesDocument8 pagesDS0026 Dual High-Speed MOS Driver: General Description FeatureslujorebNo ratings yet
- AN626 - Lead Acid Battery Charger Using The PIC14C000Document0 pagesAN626 - Lead Acid Battery Charger Using The PIC14C000mlaura2No ratings yet
- UC3845 Technical ExplanationDocument15 pagesUC3845 Technical ExplanationankurmalviyaNo ratings yet
- A CMOS Under-Voltage Lockout CircuitDocument4 pagesA CMOS Under-Voltage Lockout CircuitpiyushpandeyNo ratings yet
- LMC555 CMOS Timer: Literature Number: SNAS558HDocument14 pagesLMC555 CMOS Timer: Literature Number: SNAS558HIvr FloresNo ratings yet
- AppNote03 Uc3842Document14 pagesAppNote03 Uc3842Heriberto Flores AmpieNo ratings yet
- Aplicacion Uc3842Document15 pagesAplicacion Uc3842Gian Mejia100% (1)
- Slua 143Document15 pagesSlua 143Tonia KataNo ratings yet
- Real Time Automotive Battery Monitoring System - ReportDocument30 pagesReal Time Automotive Battery Monitoring System - ReportOmkar MaliNo ratings yet
- LM2852 Synchronous BuckDocument14 pagesLM2852 Synchronous BuckAndrew CavanaughNo ratings yet
- Choose The Right Regulator For The Right Job: Part 3, Component SelectionDocument10 pagesChoose The Right Regulator For The Right Job: Part 3, Component SelectionJonathan JaegerNo ratings yet
- Tidu 413Document25 pagesTidu 413suganthsuthaNo ratings yet
- Microprocessor Based Impedance RelayDocument11 pagesMicroprocessor Based Impedance RelayS Bharadwaj ReddyNo ratings yet
- Analysis and Design of Cyclic Switched-Capacitor DC-DC ConvertersDocument11 pagesAnalysis and Design of Cyclic Switched-Capacitor DC-DC ConvertersAjmal FarooqNo ratings yet
- ACT30Document10 pagesACT30arao_filhoNo ratings yet
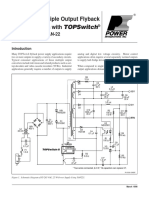
- Topswitch: Designing Multiple Output Flyback Power Supplies WithDocument24 pagesTopswitch: Designing Multiple Output Flyback Power Supplies WithteomondoNo ratings yet
- Using Fast Fourier Extraction Method Power Quality Improvement by DVR For Unbalanced Voltage Sag-Swell ControlDocument7 pagesUsing Fast Fourier Extraction Method Power Quality Improvement by DVR For Unbalanced Voltage Sag-Swell ControlInternational Journal of computational Engineering research (IJCER)No ratings yet
- HVDC Unit IIDocument5 pagesHVDC Unit IIollata kalanoNo ratings yet
- SM72441 Programmable Maximum Power Point Tracking Controller For Photovoltaic Solar PanelsDocument10 pagesSM72441 Programmable Maximum Power Point Tracking Controller For Photovoltaic Solar PanelsShahid SiddiqueNo ratings yet
- Speed Control of PMSM by Using DSVM - DTC TechniqueDocument5 pagesSpeed Control of PMSM by Using DSVM - DTC TechniqueKushagra KhamesraNo ratings yet
- Designing With Low-Side MOSFET DriversDocument4 pagesDesigning With Low-Side MOSFET DriversReparación De Laptops En CelayaNo ratings yet
- Spice Model Laser Diode 15diDocument8 pagesSpice Model Laser Diode 15diParker333100% (1)
- 3.3V/5V or Adjustable-Output, Step-Up DC-DC ConvertersDocument12 pages3.3V/5V or Adjustable-Output, Step-Up DC-DC ConvertersGilmarAlbueraNo ratings yet
- Project Report Speed Control of Induction MotorDocument47 pagesProject Report Speed Control of Induction Motorsrajaprojects0% (1)
- Key MOSFET Parameters For Motor Control ApplicationsDocument10 pagesKey MOSFET Parameters For Motor Control ApplicationsdinhquangcdtbkNo ratings yet
- An1102 PDFDocument10 pagesAn1102 PDFprashantbabuNo ratings yet
- An725 MaximDocument9 pagesAn725 MaximJavierNo ratings yet
- AMIS-39101 Octal High Side Driver With Protection: General DescriptionDocument12 pagesAMIS-39101 Octal High Side Driver With Protection: General Descriptionblackmesa82No ratings yet
- Snva 824Document16 pagesSnva 824otak hatiNo ratings yet
- Basic of DCDCDocument14 pagesBasic of DCDCAnil KoulNo ratings yet
- Low Power Battery DesignDocument8 pagesLow Power Battery DesignAmmulu KondaNo ratings yet
- Measuring Mosfet Curve Tracer PDFDocument11 pagesMeasuring Mosfet Curve Tracer PDFEugene Chew100% (2)
- And8328 DDocument8 pagesAnd8328 DJonatan LunaNo ratings yet
- Gek 34124GDocument24 pagesGek 34124GgusgifNo ratings yet
- Basic Stamp - Digital Signal ConditioningDocument27 pagesBasic Stamp - Digital Signal ConditioningRussellNo ratings yet
- PB Battery ChargerDocument6 pagesPB Battery ChargerarezrthNo ratings yet
- High-performance offline controller delivers lowest total cost solution in compact packagesDocument9 pagesHigh-performance offline controller delivers lowest total cost solution in compact packagesRICHIHOTS2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Overview of ST-LINK Derivatives: Technical NoteDocument13 pagesOverview of ST-LINK Derivatives: Technical NoteBehzad MahboubiNo ratings yet
- GDB Quick GuideDocument6 pagesGDB Quick GuideAnshul GoyalNo ratings yet
- 5988-8548en NTC Tech OverDocument21 pages5988-8548en NTC Tech Overtare890No ratings yet
- VOIP Basics Cheat SheetDocument1 pageVOIP Basics Cheat SheetDaniel Jiménez CórdovaNo ratings yet
- F mt4 III 100 PDFDocument1 pageF mt4 III 100 PDFtare890No ratings yet
- Physical Terminations PDFDocument1 pagePhysical Terminations PDFYacine A. MezianeNo ratings yet
- Aa 2002Document2 pagesAa 2002tare890No ratings yet
- Anaconda Cheat SheetDocument1 pageAnaconda Cheat SheetBrianNo ratings yet
- Network Analyzer SAN - Data SheetDocument4 pagesNetwork Analyzer SAN - Data Sheettare890No ratings yet
- Ieee 802.1XDocument1 pageIeee 802.1XSaravana SanthoshNo ratings yet
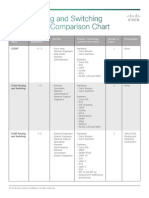
- Cisco Routing and Switching Certification Comparison ChartDocument2 pagesCisco Routing and Switching Certification Comparison Charttare890No ratings yet
- Media WikiDocument1 pageMedia WikiAnovar_ebooksNo ratings yet
- Markdown Tip Sheet Quick ReferenceDocument1 pageMarkdown Tip Sheet Quick ReferenceNimisha SinghNo ratings yet
- 74HC4050 CNV PDFDocument7 pages74HC4050 CNV PDFtare890No ratings yet
- AHRS500GA DatasheetDocument2 pagesAHRS500GA Datasheettare890No ratings yet
- Ds SM125 V30Document51 pagesDs SM125 V30Crystal Mark100% (1)
- Configuring RIP: RIP Configuration Task ListDocument8 pagesConfiguring RIP: RIP Configuration Task Listtare890No ratings yet
- AHRS500GA DatasheetDocument2 pagesAHRS500GA Datasheettare890No ratings yet
- Info Ormation Safety N Sheet Y Infor Rmatio (Nford (Dvms Digital) Volt M MetersDocument3 pagesInfo Ormation Safety N Sheet Y Infor Rmatio (Nford (Dvms Digital) Volt M Meterstare890No ratings yet
- Introduction To PIC Microcontroller: Lecturer: DR Abd Rahman Tamuri, DR Yaacob Mat DaudDocument54 pagesIntroduction To PIC Microcontroller: Lecturer: DR Abd Rahman Tamuri, DR Yaacob Mat DaudRaymond Esmeralda100% (1)
- DVM M851Document39 pagesDVM M851tare890No ratings yet
- AN557 - Four-Channel Digital Voltmeter With Display and Keyboard - MicrochipDocument30 pagesAN557 - Four-Channel Digital Voltmeter With Display and Keyboard - MicrochipRicardo BessaNo ratings yet
- Using PICKit™ 3 For MPLAB® X IDEDocument1 pageUsing PICKit™ 3 For MPLAB® X IDEpopoyboy100% (1)
- PIC16C22Document36 pagesPIC16C22kannanv93No ratings yet
- Overview of Routing Between VLANs (VLANDocument6 pagesOverview of Routing Between VLANs (VLANkasula-sridhar-kumar-7646No ratings yet
- 52011ADocument1 page52011AMitroescu ClaudiaNo ratings yet
- AHRS500GA DatasheetDocument2 pagesAHRS500GA Datasheettare890No ratings yet
- Memsic KitDocument10 pagesMemsic KitapzeiroNo ratings yet
- Electrical and Electronic Troubleshooting For Industrial EnginesDocument25 pagesElectrical and Electronic Troubleshooting For Industrial EnginespanddyanNo ratings yet
- DigiKey CatalogueDocument851 pagesDigiKey CatalogueAnonymous kKYg8kcNo ratings yet
- CIN NO. U40108JH2013SGC001702: Print This Page Continue To Payment Gateway Pay by Neft/RtgsDocument1 pageCIN NO. U40108JH2013SGC001702: Print This Page Continue To Payment Gateway Pay by Neft/RtgsMalay YadavNo ratings yet
- 1SDC007110G0203Document86 pages1SDC007110G0203Muthu KumaranNo ratings yet
- January 26 REE PDFDocument8 pagesJanuary 26 REE PDFJake ZozobradoNo ratings yet
- Toyota Series Electrical 623 Training Course Elec03 The BatteryDocument2 pagesToyota Series Electrical 623 Training Course Elec03 The Batterykaren100% (42)
- Brake Rectifiers: Coil Voltage SelectionDocument2 pagesBrake Rectifiers: Coil Voltage SelectionGeoffrey PearmainNo ratings yet
- Semikron SKKT - 27 - 07897231Document4 pagesSemikron SKKT - 27 - 07897231shamkhairnarNo ratings yet
- Manual Instalación PBO 85 PDFDocument26 pagesManual Instalación PBO 85 PDFWilson ValladaresNo ratings yet
- 1HSM 9543 40-00en IT Application Guide Ed4Document9 pages1HSM 9543 40-00en IT Application Guide Ed4ashish sahaNo ratings yet
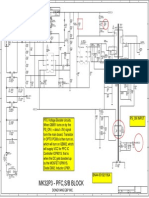
- MK32P VE_MULTIDocument2 pagesMK32P VE_MULTIEvgenyPetrovich0% (1)
- Eim 8 Summative TestDocument2 pagesEim 8 Summative TestMaribel G. Montiar100% (2)
- DV DT Limitation of SCR S PDFDocument1 pageDV DT Limitation of SCR S PDFaswardiNo ratings yet
- Square D - BuswayDocument156 pagesSquare D - BuswayAnthony BifanoNo ratings yet
- Wartsila 3516B 1800kW Spec SheetDocument7 pagesWartsila 3516B 1800kW Spec SheetKaala DNo ratings yet
- SRM Base Installation (955748)Document28 pagesSRM Base Installation (955748)Sergey BashtoviyNo ratings yet
- Gohz Frequency Converter User ManualDocument27 pagesGohz Frequency Converter User ManualmammolloNo ratings yet
- lm2940 N PDFDocument35 pageslm2940 N PDFyovaniNo ratings yet
- Inicio Rapido de Variador de VelocidadDocument5 pagesInicio Rapido de Variador de Velocidadjuan malyNo ratings yet
- LM340T12 DatasheetDocument20 pagesLM340T12 DatasheetGilberto Cruz RuizNo ratings yet
- Short Circuit CalculationDocument42 pagesShort Circuit Calculationgraduadoesime100% (17)
- Squre D 60103 Circuit Breakers Data SheetDocument2 pagesSqure D 60103 Circuit Breakers Data SheetTrEnD SeT vicky rioNo ratings yet
- Surge Protective Device Types - Type 1, Type 2, Type 3, Type 4Document3 pagesSurge Protective Device Types - Type 1, Type 2, Type 3, Type 4anuragpugaliaNo ratings yet
- Experiment 3Document10 pagesExperiment 3nuharzardNo ratings yet
- Power Distribution Cat 3 2018 LR-V20Document192 pagesPower Distribution Cat 3 2018 LR-V20Виталий КотNo ratings yet
- Speed Control Methods of Induction MotorDocument6 pagesSpeed Control Methods of Induction MotorsahebraoNo ratings yet
- Mobile Charging Circuit ConceptsDocument25 pagesMobile Charging Circuit ConceptsMustafa Kreet (ICT MAX)No ratings yet
- Lexus Body Electrical Diagnosis Test AnswersDocument9 pagesLexus Body Electrical Diagnosis Test AnswersLong HàNo ratings yet
- Tecnotion TBW Series SpecsheetDocument2 pagesTecnotion TBW Series SpecsheetElectromateNo ratings yet
- Dc-Ac Inverter: Model: SAM-450-12EDocument16 pagesDc-Ac Inverter: Model: SAM-450-12Eduque_sadeNo ratings yet