You might also like
- Microcontroller Based Robotic ArmDocument5 pagesMicrocontroller Based Robotic Armনূর হোসেন সৌরভ0% (1)
- Analytical Inverse Kinematics Algorithm of 5 Dof Robot ArmDocument13 pagesAnalytical Inverse Kinematics Algorithm of 5 Dof Robot ArmsathyaNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komNo ratings yet
- Module 02 - Robot KinematicsDocument46 pagesModule 02 - Robot KinematicsRisha AnurajNo ratings yet
- 6servo Robot Arm EngDocument18 pages6servo Robot Arm EngĐỗ ThànhNo ratings yet
- 2012-1813. DH Representation - ExamplesDocument42 pages2012-1813. DH Representation - Examplesmodisuryaharsha100% (1)
- Robotics Unit2Document8 pagesRobotics Unit2harikiran3285No ratings yet
- Introduction To Mentor Robotic ArmDocument2 pagesIntroduction To Mentor Robotic ArmSAMIE KHANNo ratings yet
- 5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyDocument6 pages5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyCh RajaNo ratings yet
- Inverse Kinematic Control of A Prosthetic ArmDocument26 pagesInverse Kinematic Control of A Prosthetic Armodsnet100% (1)
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaNo ratings yet
- RoboticsDocument37 pagesRobotics9944805552No ratings yet
- Robotic Arm With Base Rotation Elbow and Wrist Motion With Functional GripperDocument2 pagesRobotic Arm With Base Rotation Elbow and Wrist Motion With Functional GripperHushein RasheethNo ratings yet
- Fabrication & Controling of A Manipulator With Specific Coloured Object DetectionDocument18 pagesFabrication & Controling of A Manipulator With Specific Coloured Object DetectionTusher Saha50% (8)
- Experiment - 5: AIM-To Study Forward KinematicsDocument7 pagesExperiment - 5: AIM-To Study Forward Kinematicsvarunmonga90No ratings yet
- Robotics TeachingPlan BoSE&TC KBCDocument2 pagesRobotics TeachingPlan BoSE&TC KBCvydeo100% (1)
- Manipulator Kinematics - Example - 3R: MECH 498: Introduction To Robotics Inverse Manipulator Kinematics M. O'MalleyDocument50 pagesManipulator Kinematics - Example - 3R: MECH 498: Introduction To Robotics Inverse Manipulator Kinematics M. O'MalleyRahulGP88% (8)
- Robotic ArmDocument106 pagesRobotic ArmGourav SinglaNo ratings yet
- Robotic Arm Packaging and ParrelitizingDocument12 pagesRobotic Arm Packaging and ParrelitizingAdeel Ahmad WattooNo ratings yet
- Oie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamceDocument48 pagesOie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamcemaniNo ratings yet
- A Tether-Less Legged Piezoelectric Miniature Robot Using Bounding Gait Locomotion For Bidirectional MotionDocument6 pagesA Tether-Less Legged Piezoelectric Miniature Robot Using Bounding Gait Locomotion For Bidirectional MotionHassan HaririNo ratings yet
- 6 Robot Kinematics and Dynamics 1 PDFDocument45 pages6 Robot Kinematics and Dynamics 1 PDFCosorAndrei-AlexandruNo ratings yet
- Industrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeDocument73 pagesIndustrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeSiddharth Gupta0% (1)
- Line - Following - Robot 2019 09 11 12 49 PDFDocument3 pagesLine - Following - Robot 2019 09 11 12 49 PDFMegharaj GoudarNo ratings yet
- ForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFDocument11 pagesForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFAshar HaroonNo ratings yet
- Line Follower RobotDocument29 pagesLine Follower RobotSebastin AshokNo ratings yet
- How Robots Work: Based On Information From: andDocument15 pagesHow Robots Work: Based On Information From: andWilly GuerreroNo ratings yet
- Servo Based 5 Axis Robotic Arm Project ReportDocument38 pagesServo Based 5 Axis Robotic Arm Project ReportRobo India100% (1)
- Robot Assist Users Manual PDFDocument80 pagesRobot Assist Users Manual PDFIvan AvramovNo ratings yet
- Control Algorithm For A Biped Robot Based On Servo-Motors Controlled by An Android ApplicationDocument7 pagesControl Algorithm For A Biped Robot Based On Servo-Motors Controlled by An Android ApplicationLuis MachadoNo ratings yet
- RobotDocument5 pagesRobotSonal Mehir RamjununNo ratings yet
- Line Follower Robot. 03docDocument30 pagesLine Follower Robot. 03docBilal Ali Ahmad0% (1)
- KUKA Ready2 Use enDocument8 pagesKUKA Ready2 Use enLuís Miguel RomãoNo ratings yet
- Basic RobotsDocument28 pagesBasic Robotsrammit2007No ratings yet
- RObotics and Automation Question Bank AnDocument19 pagesRObotics and Automation Question Bank AnSharmila83No ratings yet
- An Introduction To Robotic ManipulatorsDocument29 pagesAn Introduction To Robotic ManipulatorsAyush_Rai_2506No ratings yet
- Line Follower Robot ArduinoDocument5 pagesLine Follower Robot ArduinoMikoko YanosudaNo ratings yet
- Self Balancing Robot PDFDocument12 pagesSelf Balancing Robot PDFVickey VigneshNo ratings yet
- Leap MotionDocument19 pagesLeap Motion46harmeetNo ratings yet
- ScaraDocument7 pagesScaraAnand Kumar MishraNo ratings yet
- LFR ReportDocument9 pagesLFR ReportBilal ShafiNo ratings yet
- A Low-Cost Compliant 7-DOF Robotic Manipulator: Morgan Quigley, Alan Asbeck, and Andrew Y. NGDocument8 pagesA Low-Cost Compliant 7-DOF Robotic Manipulator: Morgan Quigley, Alan Asbeck, and Andrew Y. NGsigmateNo ratings yet
- Robotics Toolbox For MATLAB Rel6Document6 pagesRobotics Toolbox For MATLAB Rel6Eduardo RodríguezNo ratings yet
- Introduction To ROBOTICSDocument25 pagesIntroduction To ROBOTICSNyandaMadili MalashiNo ratings yet
- Denavit Hartenberg KinematicsDocument32 pagesDenavit Hartenberg KinematicshasdaNo ratings yet
- Denavit - Hartenberg AlgorithmDocument30 pagesDenavit - Hartenberg AlgorithmherioshkoshNo ratings yet
- Line Following RobotDocument18 pagesLine Following RobotKamran FaisalNo ratings yet
- Robotics - SeminarDocument48 pagesRobotics - SeminarAnshuman TripathiNo ratings yet
- A New 6-DOF Parallel Robot With Simple Kinematic Model: Nicholas Seward, Ilian A. Bonev, Senior Member, IEEEDocument6 pagesA New 6-DOF Parallel Robot With Simple Kinematic Model: Nicholas Seward, Ilian A. Bonev, Senior Member, IEEEAhmedSeragNo ratings yet
- 3 - Robot MechanismsDocument6 pages3 - Robot MechanismsKetan PanchalNo ratings yet
- Robotics NotesDocument22 pagesRobotics NotesUpendra020% (1)
- Kinematic Analysis of 5 Dof Lynx ArmDocument6 pagesKinematic Analysis of 5 Dof Lynx ArmsathyaNo ratings yet
- Assignment of Arm RobotDocument7 pagesAssignment of Arm RobotRikko PutraNo ratings yet
- Inverse Kinematics PUMA 762 SimulatorDocument1 pageInverse Kinematics PUMA 762 SimulatorMuhammad ZulfiqarNo ratings yet
- Project 1 - Robotic ArmDocument19 pagesProject 1 - Robotic ArmAizzat ZackNo ratings yet
- Robot Arm TutorialDocument16 pagesRobot Arm Tutorialjulfo05100% (1)
- Robotic ArmDocument17 pagesRobotic ArmAbhinavTiwariNo ratings yet
- Robot Design BasicsDocument21 pagesRobot Design BasicsHaider AliNo ratings yet
- MQ 216Document2 pagesMQ 216Farshad yazdiNo ratings yet
- MQ307ADocument2 pagesMQ307AFarshad yazdiNo ratings yet
- For CARBON MONOXIDE (CO) and Methane Detection General InformationDocument3 pagesFor CARBON MONOXIDE (CO) and Methane Detection General InformationFarshad yazdi100% (1)
- MQ306ADocument2 pagesMQ306AFarshad yazdiNo ratings yet
- Datasheet Sensor MQ9Document3 pagesDatasheet Sensor MQ9Harold CaraballoNo ratings yet
- MQ 8Document2 pagesMQ 8Farshad yazdiNo ratings yet
- MQ 214Document2 pagesMQ 214api-3850017100% (1)
- MicroNote Series 201Document2 pagesMicroNote Series 201Farshad yazdiNo ratings yet
- Semiconductor Application NoteDocument10 pagesSemiconductor Application NoteFarshad yazdi100% (2)
- MQ 6Document2 pagesMQ 6api-3850017No ratings yet
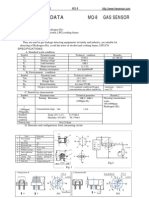
- MQ 4Document2 pagesMQ 4api-3850017100% (1)
- MQ 5Document2 pagesMQ 5api-3850017100% (2)
- Technical Data Mq-7 Gas Sensor: FeaturesDocument3 pagesTechnical Data Mq-7 Gas Sensor: FeaturesFarshad yazdiNo ratings yet
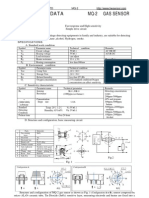
- MQ 2Document2 pagesMQ 2api-3850017100% (1)
- MQ 3Document2 pagesMQ 3Farshad yazdiNo ratings yet
- Electus Distribution Reference Data Sheet: RESCODE PDFDocument2 pagesElectus Distribution Reference Data Sheet: RESCODE PDFFarshad yazdi100% (2)
- Micro-Notes 401 Diodo Schottky PDFDocument2 pagesMicro-Notes 401 Diodo Schottky PDFElectricEngineeringNo ratings yet
- Electus Distribution Reference Data Sheet: POLYMOVS PDFDocument2 pagesElectus Distribution Reference Data Sheet: POLYMOVS PDFFarshad yazdi100% (2)
- Driver RelayDocument2 pagesDriver Relaysandi sukma100% (1)
- Led LaserDocument3 pagesLed LaserPayal SinghalNo ratings yet
- Electus Distribution Reference Data Sheet: POLYMOVS PDFDocument2 pagesElectus Distribution Reference Data Sheet: POLYMOVS PDFFarshad yazdi100% (2)
- Variable Resistors or Pots : Electus Distribution Reference Data Sheet: POTPRIMR PDFDocument3 pagesVariable Resistors or Pots : Electus Distribution Reference Data Sheet: POTPRIMR PDFmuta'alimNo ratings yet
- CcoptDocument3 pagesCcoptMidhun VargheseNo ratings yet
- Harmonic Filter Calculation SpreadsheetDocument2 pagesHarmonic Filter Calculation SpreadsheetFarshad yazdi100% (2)
- Harmonic Filter CalculationsDocument1 pageHarmonic Filter CalculationsFarshad yazdi100% (3)
- Impedance Matching 2Document3 pagesImpedance Matching 2Madhavesh KulkarniNo ratings yet
- LCD InterfaceDocument4 pagesLCD InterfaceFarshad yazdi100% (2)
- Hum LoopDocument3 pagesHum Loopapi-3716544100% (2)
- Electus Distribution Reference Data Sheet: FUSEPRMR PDFDocument2 pagesElectus Distribution Reference Data Sheet: FUSEPRMR PDFFarshad yazdiNo ratings yet
- Electus Distribution Reference Data Sheet: FERRITES PDFDocument3 pagesElectus Distribution Reference Data Sheet: FERRITES PDFFarshad yazdi100% (2)
- ASh SeriesDocument48 pagesASh SeriesAyman Saber100% (2)
- At N.p.c.i.l., RawatbhataDocument30 pagesAt N.p.c.i.l., RawatbhataDevendra SharmaNo ratings yet
- Making HEC-RAS Models Run FasterDocument27 pagesMaking HEC-RAS Models Run FasterAaron NicholsNo ratings yet
- Lifetime Calculation of Irregularly Oscillating Bearings in Offshore WinchesDocument12 pagesLifetime Calculation of Irregularly Oscillating Bearings in Offshore WinchesNadav SharabiNo ratings yet
- Astronomy - November 2013 (Gnv64)Document80 pagesAstronomy - November 2013 (Gnv64)edies50% (2)
- 2017 Tubing InformationDocument28 pages2017 Tubing InformationSatyabrat GaanNo ratings yet
- F5 KSSM Tutorial 1.1 (Force and Motion Ii)Document13 pagesF5 KSSM Tutorial 1.1 (Force and Motion Ii)Alia Qistina Mara KasmedeeNo ratings yet
- Valve and Pipeline Design Notes - Part 1Document29 pagesValve and Pipeline Design Notes - Part 1Anilduth Baldan100% (2)
- Activity 1Document6 pagesActivity 1Aldwin AjocNo ratings yet
- Part B - Viscous FlowDocument68 pagesPart B - Viscous FlowSamNo ratings yet
- Several Problems of The Polish Physics Olympiad: Waldemar GorzkowskiDocument4 pagesSeveral Problems of The Polish Physics Olympiad: Waldemar GorzkowskiVikram SaurabhNo ratings yet
- Kinematic Analysis of The Double Side Kick in Pointfighting, KickboxingDocument9 pagesKinematic Analysis of The Double Side Kick in Pointfighting, KickboxingMihai RNo ratings yet
- Advanced Organic Test Questionnaire Practice KeyDocument8 pagesAdvanced Organic Test Questionnaire Practice KeyJuitchiboy Nunez DumaoNo ratings yet
- Lesson 29 Stability Analysis of Gravity Dams: Forces and General RequirementsDocument4 pagesLesson 29 Stability Analysis of Gravity Dams: Forces and General RequirementsabshawNo ratings yet
- Discrete Element Modelling of Rockfill Railway EmbankmentsDocument15 pagesDiscrete Element Modelling of Rockfill Railway EmbankmentsHerdin AsyidiqNo ratings yet
- Lab Report On AdsorptionDocument12 pagesLab Report On AdsorptionElizabeth Polancos BruaNo ratings yet
- Chapter 05Document49 pagesChapter 05bellaNo ratings yet
- AdventureDocument2 pagesAdventureAanya NarayanNo ratings yet
- 1.1 Expansive SoilDocument9 pages1.1 Expansive SoilYatin JethiNo ratings yet
- Syllabus - EE 211L - Electrical Circuits 1Document8 pagesSyllabus - EE 211L - Electrical Circuits 1Miko F. RodriguezNo ratings yet
- ClabDocument123 pagesClabScribd UserNo ratings yet
- OxF125 SignedDocument6 pagesOxF125 SignedJOSE ABADNo ratings yet
- p1k Pde2577tcuk 052009 PDFDocument20 pagesp1k Pde2577tcuk 052009 PDFwalid8311No ratings yet
- EP2CD4T1. Notes - Phys 1D Review With FlexPDE and MapleDocument63 pagesEP2CD4T1. Notes - Phys 1D Review With FlexPDE and MapleJason wonwonNo ratings yet
- Joshi Classes Test (+2) : One Marks QuestionsDocument15 pagesJoshi Classes Test (+2) : One Marks QuestionsPaavni SharmaNo ratings yet
- Per g26 Pub 32704 Touchstone AssessmentQPHTMLMode1 32704O236 32704O236S10D1795 17060852160988057 JC1601372310008 32704O236S10D1795E1.html#Document37 pagesPer g26 Pub 32704 Touchstone AssessmentQPHTMLMode1 32704O236 32704O236S10D1795 17060852160988057 JC1601372310008 32704O236S10D1795E1.html#Sandip pawarNo ratings yet
- Practice Problems 4 and 5Document3 pagesPractice Problems 4 and 5shuckss taloNo ratings yet
- D Angelo Dongre 2009 Practical Use of Multiple Stress Creep and Recovery Test Characterization of Styrene ButadieneDocument10 pagesD Angelo Dongre 2009 Practical Use of Multiple Stress Creep and Recovery Test Characterization of Styrene Butadienebn23cem3r15No ratings yet
- Applied III, Worksheet 1Document4 pagesApplied III, Worksheet 1mintuwondeNo ratings yet
- Rieber Sealing in AmericaDocument10 pagesRieber Sealing in Americaulloap*100% (1)