You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Final Exam Review: This Is A List of The Topic Covered in The CourseDocument2 pagesFinal Exam Review: This Is A List of The Topic Covered in The CoursejkmaroNo ratings yet
- Rev ExamDocument4 pagesRev ExamjkmaroNo ratings yet
- Lec 15Document3 pagesLec 15jkmaroNo ratings yet
- Lec 12Document2 pagesLec 12jkmaroNo ratings yet
- MidtermDocument2 pagesMidtermjkmaroNo ratings yet
- Lec 10Document2 pagesLec 10jkmaroNo ratings yet
- Midterm SolDocument2 pagesMidterm SoljkmaroNo ratings yet
- Reliability: APSC 380: I M 1997/98 W S T 2Document4 pagesReliability: APSC 380: I M 1997/98 W S T 2jkmaroNo ratings yet
- Lec 13Document2 pagesLec 13jkmaroNo ratings yet
- Lec 9Document4 pagesLec 9jkmaroNo ratings yet
- Lec 7Document4 pagesLec 7jkmaroNo ratings yet
- Serial Interfaces: RS-232 InterfaceDocument3 pagesSerial Interfaces: RS-232 InterfacejkmaroNo ratings yet
- Lec 6Document4 pagesLec 6jkmaroNo ratings yet
- Digital Logic Design: Applications For Logic CircuitsDocument4 pagesDigital Logic Design: Applications For Logic CircuitsjkmaroNo ratings yet
- Number Bases and C's Bitwise OperatorsDocument3 pagesNumber Bases and C's Bitwise OperatorsjkmaroNo ratings yet
- Lec 4Document2 pagesLec 4jkmaroNo ratings yet
- Lec 1Document3 pagesLec 1jkmaroNo ratings yet
- Introduction To C: The Structure of A C ProgramDocument9 pagesIntroduction To C: The Structure of A C ProgramjkmaroNo ratings yet
- Lab 1Document2 pagesLab 1jkmaroNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Ganz Hydro-Power: Over 150 Years of ExperienceDocument1 pageGanz Hydro-Power: Over 150 Years of ExperiencepalanaruvaNo ratings yet
- Ijso 2012Document5 pagesIjso 2012bhaskarNo ratings yet
- Technical Reference Guide On Steam DistributionDocument66 pagesTechnical Reference Guide On Steam DistributionDainycious KibiwottNo ratings yet
- FANUC Robot R-2000iB SeriesDocument4 pagesFANUC Robot R-2000iB SeriesChandan KanuNo ratings yet
- NOx Control of Kiln and Preheater Complete AnalysisDocument129 pagesNOx Control of Kiln and Preheater Complete AnalysisAnonymous sfY8T3q0100% (2)
- QlikView Business Intelligence Tool OverviewDocument11 pagesQlikView Business Intelligence Tool OverviewMithun LayekNo ratings yet
- Monopoly - Indian Railways: - Anand Dube - Darshna Chande - Karan Sobti - Sriaditya Kasula - Vinay ChaudhariDocument52 pagesMonopoly - Indian Railways: - Anand Dube - Darshna Chande - Karan Sobti - Sriaditya Kasula - Vinay ChaudhariKristamRajuNo ratings yet
- Contact Centre CapabilityDocument2 pagesContact Centre CapabilityshyamchepurNo ratings yet
- Tivizen Iplug Greek GuideDocument13 pagesTivizen Iplug Greek GuideDenexoNo ratings yet
- COMEC Modular Storage SolutionsDocument8 pagesCOMEC Modular Storage SolutionsPedro ChapadoNo ratings yet
- Stray Current CorrosionDocument21 pagesStray Current CorrosionPaolo Mogollon AcostaNo ratings yet
- Elsa CableDocument2 pagesElsa CableJay WangNo ratings yet
- Coal Drying Technology and Plant DesignDocument12 pagesCoal Drying Technology and Plant DesignJigar M. UpadhyayNo ratings yet
- Indigo Assessment - Cynthia Nieto VargasDocument14 pagesIndigo Assessment - Cynthia Nieto Vargasapi-506651646No ratings yet
- Rocket Icluster V8.1Document16 pagesRocket Icluster V8.1Felipe Cervantes EspinosaNo ratings yet
- 319918Document4 pages319918Daniel BilickiNo ratings yet
- Presentation - Slides Holmes Lever 221215Document33 pagesPresentation - Slides Holmes Lever 221215Ralitsa OlevaNo ratings yet
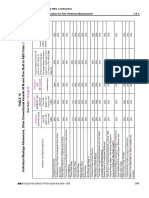
- ABS Thickness Measurement Requirement For Ship in Operation PDFDocument2 pagesABS Thickness Measurement Requirement For Ship in Operation PDFMohd Fouzi AbdullahNo ratings yet
- CS5001 CourseworkDocument9 pagesCS5001 CourseworkpeteligijusNo ratings yet
- BSBPMG410+Apply+project+time+management+techniques V170225Document35 pagesBSBPMG410+Apply+project+time+management+techniques V170225Sabrina Gao100% (1)
- How To Build A Backyard PergolaDocument15 pagesHow To Build A Backyard PergolaMichael Wilkins100% (1)
- Technical VolumeDocument162 pagesTechnical Volumeiamskg63891583No ratings yet
- Thermal Arc 161 STL 201 Ts Inverter Welder SM PDFDocument96 pagesThermal Arc 161 STL 201 Ts Inverter Welder SM PDFduyNo ratings yet
- ATHENAEUMDocument4 pagesATHENAEUMShubhra PatraNo ratings yet
- Lab Report Building TransportationDocument8 pagesLab Report Building TransportationshahNo ratings yet
- Hdpe Alathon H5520 EquistarDocument2 pagesHdpe Alathon H5520 EquistarEric Mahonri PereidaNo ratings yet
- Audex CatalogueDocument16 pagesAudex CatalogueAnonymous CMS3dL1TNo ratings yet
- Curriculum Vitae: Vivek PatilDocument3 pagesCurriculum Vitae: Vivek PatilVivek PatilNo ratings yet
- Magic Quadrant For Identity Governance and AdministrationDocument18 pagesMagic Quadrant For Identity Governance and AdministrationmilosvblNo ratings yet
- Catalogo Recordplus General ElectricDocument12 pagesCatalogo Recordplus General ElectricDruen Delgado MirandaNo ratings yet