You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Ojee ScheduleDocument2 pagesOjee ScheduleAnonymous rTRz30fNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 01 MarginsDocument4 pages01 MarginsAnonymous rTRz30fNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 2.1.2 Primary Control Techniques in AC MicrogridsDocument1 page2.1.2 Primary Control Techniques in AC MicrogridsAnonymous rTRz30fNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Prof. Alireza Khaligh: Power Electronics Laboratory (MPEL) at The Electrical andDocument3 pagesProf. Alireza Khaligh: Power Electronics Laboratory (MPEL) at The Electrical andAnonymous rTRz30fNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Krishna Filling Station Krishna Filling Station: Dealer: B.P.C.. Dealer: B.P.C.Document1 pageKrishna Filling Station Krishna Filling Station: Dealer: B.P.C.. Dealer: B.P.C.Anonymous rTRz30fNo ratings yet
- Cuiqing Du PH DDocument130 pagesCuiqing Du PH DAnonymous rTRz30fNo ratings yet
- 02 WholeDocument287 pages02 WholeAnonymous rTRz30fNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Listening Skills PDFDocument26 pagesListening Skills PDFAnonymous rTRz30fNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- What Do You Mean by Penalizing SomethingDocument1 pageWhat Do You Mean by Penalizing SomethingAnonymous rTRz30fNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 02 WholeDocument287 pages02 WholeAnonymous rTRz30fNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Quanser Coupled Tanks Modeling and Parameter PDFDocument7 pagesQuanser Coupled Tanks Modeling and Parameter PDFAnonymous rTRz30fNo ratings yet
- Cascade Structural Model Approximation of Identified State Space ModelsDocument6 pagesCascade Structural Model Approximation of Identified State Space ModelsAnonymous rTRz30fNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Programming and Data Structures, Spring 2011, Quiz 1 Total Marks: 30 Section I Name: Roll NumberDocument3 pagesProgramming and Data Structures, Spring 2011, Quiz 1 Total Marks: 30 Section I Name: Roll NumberAnonymous rTRz30fNo ratings yet
- Phrasal VerbsDocument1 pagePhrasal VerbsAnonymous rTRz30fNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Matlab Lmi Lab LMI: Linear Matrix InequalityDocument27 pagesMatlab Lmi Lab LMI: Linear Matrix InequalityAntonio Soto UgaldiNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Matlab LMI Toolbox Erkus - Lee - 2004aDocument10 pagesMatlab LMI Toolbox Erkus - Lee - 2004aAnonymous rTRz30fNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- State SpaceDocument9 pagesState SpaceAnonymous rTRz30fNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- DocumentationDocument38 pagesDocumentationAnonymous rTRz30fNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Apl 220014Document2 pagesApl 220014Elprince MidoNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Guitar in The Sixteenth CenturyDocument16 pagesThe Guitar in The Sixteenth CenturyPat BrandtNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Data Download CMM366A-4G V1.0 enDocument16 pagesData Download CMM366A-4G V1.0 enSuramanNo ratings yet
- Lecture 2: Stacks and Queues: CSE 373: Data Structures and AlgorithmsDocument31 pagesLecture 2: Stacks and Queues: CSE 373: Data Structures and AlgorithmsTawsifNo ratings yet
- Ee-502 Unit - IDocument2 pagesEe-502 Unit - IVARAPRASADNo ratings yet
- Ball Charge ManagementDocument14 pagesBall Charge ManagementSalud Y SucesosNo ratings yet
- Cable Sizing CalculationDocument72 pagesCable Sizing CalculationHARI my songs100% (1)
- HV Filter Carts 1Document2 pagesHV Filter Carts 1paulpopNo ratings yet
- 144S... - PCB Series: Signal Conditioned Precision Pressure TransducersDocument4 pages144S... - PCB Series: Signal Conditioned Precision Pressure TransducersAnish KumarNo ratings yet
- Betriebsanleitung SM-RI-X - Q-75 Rev2Document65 pagesBetriebsanleitung SM-RI-X - Q-75 Rev2ABDULSALAMNo ratings yet
- Caterpillar Product Line 13Document7 pagesCaterpillar Product Line 13GenneraalNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- SC431 Lecture No. 4 Economic Comparisons (Continued)Document51 pagesSC431 Lecture No. 4 Economic Comparisons (Continued)Joseph BaruhiyeNo ratings yet
- Ijarece Vol 8 Issue 8 141 144Document4 pagesIjarece Vol 8 Issue 8 141 144Rnav rnavNo ratings yet
- App NandDocument30 pagesApp NandRajesh MedampudiNo ratings yet
- HydrometerDocument13 pagesHydrometerShubhrajit MaitraNo ratings yet
- Gas Turbine Compressor WashingDocument8 pagesGas Turbine Compressor Washingwolf_ns100% (1)
- Ra 6938Document2 pagesRa 6938GaryNo ratings yet
- Optical Properties of Gem Substances Educational Objective: This Exercise, Unit 7 in The Above Syllabus, Will Introduce Students To Skills andDocument19 pagesOptical Properties of Gem Substances Educational Objective: This Exercise, Unit 7 in The Above Syllabus, Will Introduce Students To Skills andCarl SoriaNo ratings yet
- JSF + JPA + JasperReports (Ireport) Part 2 - Ramki Java BlogDocument7 pagesJSF + JPA + JasperReports (Ireport) Part 2 - Ramki Java BlogMartin MurciegoNo ratings yet
- Air Conditioner: Owner'S ManualDocument80 pagesAir Conditioner: Owner'S Manualfred MaxNo ratings yet
- CISCO Router Software - Configuration PDFDocument408 pagesCISCO Router Software - Configuration PDFasalihovicNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Yang Learning Face Age CVPR 2018 PaperDocument9 pagesYang Learning Face Age CVPR 2018 Paperandr234ibateraNo ratings yet
- Detection of Repetitive Forex Chart PatternsDocument8 pagesDetection of Repetitive Forex Chart PatternsDwight ThothNo ratings yet
- Virgil Ionescu Eforie 2016Document99 pagesVirgil Ionescu Eforie 2016Andreea CimpoiNo ratings yet
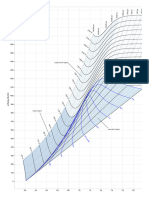
- Mollier Enthalpy Entropy Chart For Steam - US UnitsDocument1 pageMollier Enthalpy Entropy Chart For Steam - US Unitslin tongNo ratings yet
- Engg Mechanics Ques BankDocument68 pagesEngg Mechanics Ques BankUtkalNo ratings yet
- B 1 1 4 Inplant Fluid FlowDocument5 pagesB 1 1 4 Inplant Fluid FlowBolívar AmoresNo ratings yet
- Computer Dictionary PDFDocument95 pagesComputer Dictionary PDFMarjenneilNo ratings yet
- Evaluating of Rutting in Highways & Providing Its Solution in Terms of Stone Matrix Asphalt.Document7 pagesEvaluating of Rutting in Highways & Providing Its Solution in Terms of Stone Matrix Asphalt.IJRASETPublications100% (1)
- Kids Curriculum BreakdownDocument6 pagesKids Curriculum BreakdownSuniel ChhetriNo ratings yet