You might also like
- Quality Objectives - E 091201 PDFDocument1 pageQuality Objectives - E 091201 PDFtamann2004No ratings yet
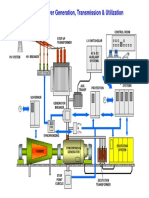
- توليد وإستخدامDocument1 pageتوليد وإستخدامtamann2004100% (1)
- FFSQP Manual PDFDocument46 pagesFFSQP Manual PDFtamann2004No ratings yet
- Ijater 04 22 PDFDocument6 pagesIjater 04 22 PDFtamann2004No ratings yet
- K - FactorTransformerDocument5 pagesK - FactorTransformerAnonymous BanTco100% (1)
- Publication Design and Engineering ch41 Ddot PDFDocument24 pagesPublication Design and Engineering ch41 Ddot PDFtamann2004No ratings yet
- Noise Pollution PDFDocument32 pagesNoise Pollution PDFHassan AliNo ratings yet
- Fractional Order Derivative and Integral Using LabVIEWDocument13 pagesFractional Order Derivative and Integral Using LabVIEWauraliusNo ratings yet
- TARIFFSDocument32 pagesTARIFFStamann2004No ratings yet
- Seasonality: T T T TDocument38 pagesSeasonality: T T T Ttamann2004No ratings yet
- Series Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission LinesDocument3 pagesSeries Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission Linestamann2004No ratings yet
- A Basic Introduction To Neural NetworksDocument6 pagesA Basic Introduction To Neural Networkstamann2004No ratings yet
- Single-Tuned Passive Harmonic Filter Design Considering Variances of Tuning and Quality Factor PDFDocument7 pagesSingle-Tuned Passive Harmonic Filter Design Considering Variances of Tuning and Quality Factor PDFtamann2004No ratings yet
- ProbabilityDocument28 pagesProbabilitytamann2004No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Need You Now Lyrics: Charles Scott, HillaryDocument3 pagesNeed You Now Lyrics: Charles Scott, HillaryAl UsadNo ratings yet
- Zero Power Factor Method or Potier MethodDocument1 pageZero Power Factor Method or Potier MethodMarkAlumbroTrangiaNo ratings yet
- Panulaang FilipinoDocument21 pagesPanulaang FilipinoKriza Erin B BaborNo ratings yet
- Best-First SearchDocument2 pagesBest-First Searchgabby209No ratings yet
- Lesson Plan Pumpkin Moon SandDocument3 pagesLesson Plan Pumpkin Moon Sandapi-273177086No ratings yet
- Pentecostal HealingDocument28 pagesPentecostal Healinggodlvr100% (1)
- WFRP - White Dwarf 99 - The Ritual (The Enemy Within)Document10 pagesWFRP - White Dwarf 99 - The Ritual (The Enemy Within)Luife Lopez100% (2)
- Liver Disease With PregnancyDocument115 pagesLiver Disease With PregnancyAmro Ahmed Abdelrhman100% (3)
- The Systems' Institute of Hindu ASTROLOGY, GURGAON (INDIA) (Registered)Document8 pagesThe Systems' Institute of Hindu ASTROLOGY, GURGAON (INDIA) (Registered)SiddharthSharmaNo ratings yet
- Top 100 Questions On Modern India History PDFDocument16 pagesTop 100 Questions On Modern India History PDFmohammed arsalan khan pathan100% (1)
- Philosophy of Education SyllabusDocument5 pagesPhilosophy of Education SyllabusGa MusaNo ratings yet
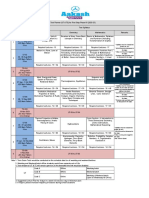
- UT & TE Planner - AY 2023-24 - Phase-01Document1 pageUT & TE Planner - AY 2023-24 - Phase-01Atharv KumarNo ratings yet
- Public International Law Green Notes 2015Document34 pagesPublic International Law Green Notes 2015KrisLarr100% (1)
- NCPDocument3 pagesNCPchesca_paunganNo ratings yet
- 1.quetta Master Plan RFP Draft1Document99 pages1.quetta Master Plan RFP Draft1Munir HussainNo ratings yet
- Great Is Thy Faithfulness - Gibc Orch - 06 - Horn (F)Document2 pagesGreat Is Thy Faithfulness - Gibc Orch - 06 - Horn (F)Luth ClariñoNo ratings yet
- Book of Dynamic Assessment in Practice PDFDocument421 pagesBook of Dynamic Assessment in Practice PDFkamalazizi100% (1)
- Predictive Tools For AccuracyDocument19 pagesPredictive Tools For AccuracyVinod Kumar Choudhry93% (15)
- Lite Touch. Completo PDFDocument206 pagesLite Touch. Completo PDFkerlystefaniaNo ratings yet
- Diode ExercisesDocument5 pagesDiode ExercisesbruhNo ratings yet
- STAFFINGDocument6 pagesSTAFFINGSaloni AgrawalNo ratings yet
- Playwriting Pedagogy and The Myth of IntrinsicDocument17 pagesPlaywriting Pedagogy and The Myth of IntrinsicCaetano BarsoteliNo ratings yet
- Win Tensor-UserGuide Optimization FunctionsDocument11 pagesWin Tensor-UserGuide Optimization FunctionsadetriyunitaNo ratings yet
- List de VerbosDocument2 pagesList de VerbosmarcoNo ratings yet
- CU 8. Johnsons Roy NeumanDocument41 pagesCU 8. Johnsons Roy NeumanPatrick MatubayNo ratings yet
- Review Questions Operational Excellence? Software WorksDocument6 pagesReview Questions Operational Excellence? Software WorksDwi RizkyNo ratings yet
- Sodium Borate: What Is Boron?Document2 pagesSodium Borate: What Is Boron?Gary WhiteNo ratings yet
- Final Presentation BANK OF BARODA 1Document8 pagesFinal Presentation BANK OF BARODA 1Pooja GoyalNo ratings yet
- Becoming FarmersDocument13 pagesBecoming FarmersJimena RoblesNo ratings yet
- Progressivism Sweeps The NationDocument4 pagesProgressivism Sweeps The NationZach WedelNo ratings yet