You might also like
- Oops NotesDocument179 pagesOops NotesSelva612No ratings yet
- Ds Lab Manual - 2018Document145 pagesDs Lab Manual - 2018Selva612No ratings yet
- Content Beyond The SyllabusDocument40 pagesContent Beyond The SyllabusSelva612No ratings yet
- What Do You Know About JavaDocument21 pagesWhat Do You Know About JavaSelva612No ratings yet
- BouncingDocument2 pagesBouncingSelva612No ratings yet
- A439677 PDFDocument93 pagesA439677 PDFjdnfjngsNo ratings yet
- 8085 Processor NotesDocument22 pages8085 Processor NotesSelva612No ratings yet
- Requirement Elicitation TechniquesDocument16 pagesRequirement Elicitation TechniquesSelva612100% (1)
- UntitledDocument1 pageUntitledSelva612No ratings yet
- StakeholdersDocument12 pagesStakeholdersvigneshkarthik23No ratings yet
- NormalizationDocument7 pagesNormalizationSelva612No ratings yet
- UntitledDocument1 pageUntitledSelva612No ratings yet
- Lecture Routing ExORDocument43 pagesLecture Routing ExORSelva612No ratings yet
- UntitledDocument1 pageUntitledSelva612No ratings yet
- UntitledDocument1 pageUntitledSelva612No ratings yet
- Algorithms Question Bank Analysis Design TechniquesDocument7 pagesAlgorithms Question Bank Analysis Design TechniquesSelva612No ratings yet
- BPO Management System - RecordDocument6 pagesBPO Management System - RecordSelva612No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A5 Service Manual 2.8Document223 pagesA5 Service Manual 2.8Anahi Calle Velasco0% (1)
- Catalogue & Price ListDocument3 pagesCatalogue & Price ListCINA auto partsNo ratings yet
- Physics Sample ProblemsDocument5 pagesPhysics Sample ProblemsEdin Abolencia0% (1)
- Adaptive Bit LoadingDocument10 pagesAdaptive Bit LoadingKrrish BommanaNo ratings yet
- CRANE RUNWAY BEAM DESIGN - ASD 9Document5 pagesCRANE RUNWAY BEAM DESIGN - ASD 9MITHUN BDML100% (1)
- Training Nathpa Jhakri SJVNLDocument53 pagesTraining Nathpa Jhakri SJVNLParas Thakur100% (3)
- Assignment ADocument2 pagesAssignment AUbair khan0% (3)
- Proposed Changes to IRS-T-29-2000 CMS Crossing Manufacturing StandardsDocument11 pagesProposed Changes to IRS-T-29-2000 CMS Crossing Manufacturing StandardsShipra MishraNo ratings yet
- Account Statement 220422 210722Document14 pagesAccount Statement 220422 210722Meherun BibiNo ratings yet
- Circular No. 27 - Olympiad ScheduleDocument2 pagesCircular No. 27 - Olympiad Schedulerishu ashiNo ratings yet
- R2B - Buffer Seals - InchDocument2 pagesR2B - Buffer Seals - InchBill MurrayNo ratings yet
- Physics SPM Paper 2 Tips 89 Modification and 11 Decision Making Question and AnswerDocument24 pagesPhysics SPM Paper 2 Tips 89 Modification and 11 Decision Making Question and Answerjirong100% (4)
- Jared Diamond. Guns Germs and Steel 1999 PDFDocument3 pagesJared Diamond. Guns Germs and Steel 1999 PDFSabah MushtaqNo ratings yet
- My Dream in The Drawer English Bookdash FKB StoriesDocument19 pagesMy Dream in The Drawer English Bookdash FKB StoriesonkNo ratings yet
- The Performing Style of Alexander Scriabin by Anatole LeikinDocument6 pagesThe Performing Style of Alexander Scriabin by Anatole LeikinRobert MorrisNo ratings yet
- Periscope HD Inagip Croatia CsDocument2 pagesPeriscope HD Inagip Croatia CsTran Dang SangNo ratings yet
- GM Construction Leads Rs 8140 Crore PCII C2C3 Recovery ProjectDocument24 pagesGM Construction Leads Rs 8140 Crore PCII C2C3 Recovery ProjectAnuj GuptaNo ratings yet
- Aircraft Flight Dynamics: at The End of The Course, You Should Be Able ToDocument23 pagesAircraft Flight Dynamics: at The End of The Course, You Should Be Able ToAntony BalabanNo ratings yet
- 60-500 KV High Voltage-Gallery PDFDocument33 pages60-500 KV High Voltage-Gallery PDFuzakcilNo ratings yet
- Water Plant EstimateDocument4 pagesWater Plant EstimateVishnu DasNo ratings yet
- Operations and Maintenance Manual MAN-10000946 Elmar Grease Injection Equipment AssemblyDocument56 pagesOperations and Maintenance Manual MAN-10000946 Elmar Grease Injection Equipment AssemblyAbhinav KumarNo ratings yet
- Guidelines For Quality Control Testing For Digital CR DR Mammography V4Document62 pagesGuidelines For Quality Control Testing For Digital CR DR Mammography V4khaerul0% (1)
- Dissertation Grosser 2012 PDFDocument359 pagesDissertation Grosser 2012 PDFPanos Sp0% (1)
- Manual CleviteDocument180 pagesManual CleviteJacko JaraNo ratings yet
- Labnet International 2011 International CatalogDocument60 pagesLabnet International 2011 International CataloglabnetinternationalNo ratings yet
- The Significance of Andragogy in Present Day Higher EducationDocument5 pagesThe Significance of Andragogy in Present Day Higher EducationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Electronics Media Internship Report ZEE NEWS CGDocument15 pagesElectronics Media Internship Report ZEE NEWS CGPrashant PandyaNo ratings yet
- Huarui Technologies Co.,Ltd VipDocument19 pagesHuarui Technologies Co.,Ltd Vipdrfaizal01No ratings yet
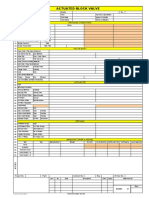
- DSS2060D Actuated Block Valve DatasheetDocument1 pageDSS2060D Actuated Block Valve Datasheetkrishna kumarNo ratings yet
- Pimpri Chinchwad Education Trust's TPO consolidated format for student list of industrial trainingDocument3 pagesPimpri Chinchwad Education Trust's TPO consolidated format for student list of industrial training0113ATHARVA CHAUDHARINo ratings yet