You might also like
- Project Synopsis: Genetic Algorithm Based PID Controller Tuning For A Model BioreactorDocument6 pagesProject Synopsis: Genetic Algorithm Based PID Controller Tuning For A Model BioreactorNikhil SinghNo ratings yet
- Comparison of Genetic Algorithm and Particle Swarm OptimizationDocument6 pagesComparison of Genetic Algorithm and Particle Swarm OptimizationMikemekanicsNo ratings yet
- Genetic Algorithms For Maintenance SchedulingDocument7 pagesGenetic Algorithms For Maintenance Schedulingpinku1005No ratings yet
- Online Genetic-Fuzzy Forward Controller For A Robot Arm: Prof Dr. Abduladeem A. AliDocument14 pagesOnline Genetic-Fuzzy Forward Controller For A Robot Arm: Prof Dr. Abduladeem A. AlinguyendattdhNo ratings yet
- Genetic Algorithms For Auto-Tuning Mobile Robot Motion ControlDocument6 pagesGenetic Algorithms For Auto-Tuning Mobile Robot Motion ControlRicardo MillerNo ratings yet
- ICEENG - Volume 9 - Issue 9th International Conference On Electrical Engineering ICEENG 2014 - Pages 1-13Document13 pagesICEENG - Volume 9 - Issue 9th International Conference On Electrical Engineering ICEENG 2014 - Pages 1-13mohamed abd el razekNo ratings yet
- Cryptography Using Genetic Algorithms (Gas) : Sonia GoyatDocument3 pagesCryptography Using Genetic Algorithms (Gas) : Sonia GoyatInternational Organization of Scientific Research (IOSR)No ratings yet
- Evolutionary Algorithms ClassificationDocument5 pagesEvolutionary Algorithms ClassificationBT KrishnaNo ratings yet
- A N: Vmiranda@porto - Inescn.pt: Muanda J. Da Fax: 351.2.318692Document7 pagesA N: Vmiranda@porto - Inescn.pt: Muanda J. Da Fax: 351.2.318692joonie5No ratings yet
- Tuning of Fuzzy Logic Controller Using Genetic AlgorithmDocument19 pagesTuning of Fuzzy Logic Controller Using Genetic AlgorithmAwadalla TaifourNo ratings yet
- Unit 5: Advanced Optimization Techniques (M.Tech)Document10 pagesUnit 5: Advanced Optimization Techniques (M.Tech)tsnrao30No ratings yet
- Electronics: Optimized Proportional-Integral-Derivative Controller For Upper Limb Rehabilitation RobotDocument26 pagesElectronics: Optimized Proportional-Integral-Derivative Controller For Upper Limb Rehabilitation RobotAdeel ur RehmanNo ratings yet
- Rajaram An 2020Document7 pagesRajaram An 2020janurangNo ratings yet
- A Genetic Algorithm For Regression Test Case Prioritization Using Code CoverageDocument9 pagesA Genetic Algorithm For Regression Test Case Prioritization Using Code CoverageGhifari PrameswariNo ratings yet
- El 16 1 05Document9 pagesEl 16 1 05Mauricio RamosNo ratings yet
- Mining Association Rules Using Genetic Algorithm: The Role of Estimation ParametersDocument9 pagesMining Association Rules Using Genetic Algorithm: The Role of Estimation ParametersindirasivakumarNo ratings yet
- 01 Dr. G.L Samuel - IITMDocument5 pages01 Dr. G.L Samuel - IITMMohan Prasad.MNo ratings yet
- Combinational Circuit Design Using Genetic AlgorithmsDocument7 pagesCombinational Circuit Design Using Genetic AlgorithmsJournal of Computer ApplicationsNo ratings yet
- EpsocDocument8 pagesEpsocapi-3712774No ratings yet
- Genetic Algorithm Based Parameter Tuning of PID CoDocument8 pagesGenetic Algorithm Based Parameter Tuning of PID CoMona Ghazal100% (1)
- The Enhanced Genetic Algorithms For The Optimization Design: Pengfei Guo Xuezhi Wang Yingshi HanDocument5 pagesThe Enhanced Genetic Algorithms For The Optimization Design: Pengfei Guo Xuezhi Wang Yingshi HanSurbhi PaliwalNo ratings yet
- Genetic Algorithm Approach For Placement Optimization of FBG Sensors For A Diagnostic SystemDocument6 pagesGenetic Algorithm Approach For Placement Optimization of FBG Sensors For A Diagnostic SystemInternational Organization of Scientific Research (IOSR)No ratings yet
- 1998 KLD Sampling Adaptive Particle FiltersDocument8 pages1998 KLD Sampling Adaptive Particle Filterssboy888No ratings yet
- CO-4 Evolutionary Computing: Prepared by Shaik AslamDocument44 pagesCO-4 Evolutionary Computing: Prepared by Shaik AslamRahulNo ratings yet
- Application of Genetic Algorithm To Economic Load Dispatch: AbstractDocument10 pagesApplication of Genetic Algorithm To Economic Load Dispatch: AbstractYogesh YadavNo ratings yet
- Exploiting A Workstation Network For Automatic Generation of Test Patterns For Digital CircuitsDocument17 pagesExploiting A Workstation Network For Automatic Generation of Test Patterns For Digital CircuitsDhwal MehtaNo ratings yet
- Applsci 08 00031 PDFDocument16 pagesApplsci 08 00031 PDFOscar SanchezNo ratings yet
- Introduccion UPDocument16 pagesIntroduccion UPOscar SanchezNo ratings yet
- 10 GaDocument20 pages10 GaNoor WaleedNo ratings yet
- Predicting Protein-Ligand Interactions Using Iterative Stochastic Elimination AlgorithmDocument149 pagesPredicting Protein-Ligand Interactions Using Iterative Stochastic Elimination AlgorithmbgorelikNo ratings yet
- Optimization Method Based On Genetic AlgorithmsDocument16 pagesOptimization Method Based On Genetic Algorithmsdavidrajan0007No ratings yet
- The Use of Genetic Algorithms in Finite Element Model IdentificationDocument8 pagesThe Use of Genetic Algorithms in Finite Element Model IdentificationMilena PopovicNo ratings yet
- 09 Chapter2 PDFDocument23 pages09 Chapter2 PDFAjay SenNo ratings yet
- Stochastic Behaviour of Parameter Convergence in Genetic Algorithm: An Experimental AnalysisDocument4 pagesStochastic Behaviour of Parameter Convergence in Genetic Algorithm: An Experimental AnalysisIJERDNo ratings yet
- The Application Research of Genetic Algorithm: Jumei ZhangDocument4 pagesThe Application Research of Genetic Algorithm: Jumei ZhangSanderNo ratings yet
- BITCON Paper TemplateDocument6 pagesBITCON Paper TemplateMahesh SinghNo ratings yet
- Application of Genetic Algorithm To Economic Load DispatchDocument10 pagesApplication of Genetic Algorithm To Economic Load DispatchBharadwaj SanthoshNo ratings yet
- 5-Bar 2-Dof Parallel RobotDocument28 pages5-Bar 2-Dof Parallel RobotHumberto Jimenez100% (1)
- Ijest11 03 07 142Document5 pagesIjest11 03 07 142hoangductuanNo ratings yet
- Sequence Scheduling With Genetic Algorithms: GENITOR Algorithm We Obtain Best Known Solutions For 30 andDocument20 pagesSequence Scheduling With Genetic Algorithms: GENITOR Algorithm We Obtain Best Known Solutions For 30 andOlivia brianneNo ratings yet
- 2003 Evolution of Combinational and Sequential Self Diagnosing HardwareDocument7 pages2003 Evolution of Combinational and Sequential Self Diagnosing HardwareZxNo ratings yet
- CSCI 447 Machine Learning: Soft Computing Project #1 Nick Ryhajlo September 26, 2011Document8 pagesCSCI 447 Machine Learning: Soft Computing Project #1 Nick Ryhajlo September 26, 2011Nick RyhajloNo ratings yet
- Application of Improved Genetic Algorithm in Ultrasonic Locationof Transformer Partial DischargeDocument10 pagesApplication of Improved Genetic Algorithm in Ultrasonic Locationof Transformer Partial DischargeNicolas MoreiraNo ratings yet
- PRNG ArticleDocument14 pagesPRNG ArticleATIQNIANo ratings yet
- Genetic Algorithm Optimization and Its Application To Antenna DesignDocument4 pagesGenetic Algorithm Optimization and Its Application To Antenna DesignÉtoile FilanteNo ratings yet
- Application of Genetic Algorithm in Software TestingDocument8 pagesApplication of Genetic Algorithm in Software TestingCurt UlandayNo ratings yet
- Rule Acquisition in Data Mining Using Genetic AlgorithmDocument9 pagesRule Acquisition in Data Mining Using Genetic AlgorithmAnonymous TxPyX8cNo ratings yet
- Roulette WheelDocument8 pagesRoulette WheelALFafaNo ratings yet
- Chapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsDocument14 pagesChapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsHossein HosseinNo ratings yet
- Economic Load Dispatch Using Genetic AlgorithmDocument13 pagesEconomic Load Dispatch Using Genetic AlgorithmsivagamipalaniNo ratings yet
- Performance Analysis of Load Frequency Control in Single Area Power System Using GA and PSO Based PID ControllerDocument7 pagesPerformance Analysis of Load Frequency Control in Single Area Power System Using GA and PSO Based PID ControllerMushtaq Najeeb AhmedNo ratings yet
- Framework For Comparison of Association Rule Mining Using Genetic AlgorithmDocument8 pagesFramework For Comparison of Association Rule Mining Using Genetic AlgorithmAnonymous TxPyX8cNo ratings yet
- Solving The Vehicle Routing Problem Using Genetic AlgorithmDocument6 pagesSolving The Vehicle Routing Problem Using Genetic AlgorithmEditor IJACSANo ratings yet
- PID Control Using PSODocument8 pagesPID Control Using PSOKệ ThôiNo ratings yet
- Simple Genetic AlgorithmDocument12 pagesSimple Genetic AlgorithmAdam GilangNo ratings yet
- Computational Intelligence Based Machine Fault Diagnosis: D. D. WANG, Debing YANG, Jinwu XU & Ke XUDocument5 pagesComputational Intelligence Based Machine Fault Diagnosis: D. D. WANG, Debing YANG, Jinwu XU & Ke XUvandersonpcNo ratings yet
- Genetic AlgorithmDocument7 pagesGenetic AlgorithmPoonam BhavsarNo ratings yet
- Association Rule Mining by Dynamic Neighborhood Selection in Particle Swarm OptimizationDocument7 pagesAssociation Rule Mining by Dynamic Neighborhood Selection in Particle Swarm OptimizationAnonymous TxPyX8cNo ratings yet
- Genetic Algorithm: Review and Application: Manoj Kumar, Mohammad Husian, Naveen Upreti & Deepti GuptaDocument4 pagesGenetic Algorithm: Review and Application: Manoj Kumar, Mohammad Husian, Naveen Upreti & Deepti GuptanelsonneymanNo ratings yet
- PLC QPDocument1 pagePLC QPmaheshboobalanNo ratings yet
- Presented by S.Keerthi Vasan G.Dinakaran 3rd YEAR - MCT 'A'Document16 pagesPresented by S.Keerthi Vasan G.Dinakaran 3rd YEAR - MCT 'A'maheshboobalanNo ratings yet
- Scheme For Young Scientists and TechnologistsDocument15 pagesScheme For Young Scientists and TechnologistsmaheshboobalanNo ratings yet
- Hybrid Additive Manufacturing TechnologiesDocument11 pagesHybrid Additive Manufacturing TechnologiesmaheshboobalanNo ratings yet
- LISTnet SharonyDocument100 pagesLISTnet SharonymaheshboobalanNo ratings yet
- Mechanism Design For Sustainable Virtual Power Plant FormationDocument6 pagesMechanism Design For Sustainable Virtual Power Plant FormationmaheshboobalanNo ratings yet
- Technical Club ActivityDocument1 pageTechnical Club ActivitymaheshboobalanNo ratings yet
- Know Yourself:: Tibetan Personality TestDocument24 pagesKnow Yourself:: Tibetan Personality TestmaheshboobalanNo ratings yet
- IotDocument3 pagesIotmaheshboobalanNo ratings yet
- Measurements and InstrumentationsDocument2 pagesMeasurements and InstrumentationsmaheshboobalanNo ratings yet
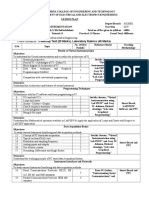
- 3 Monthly Test (20 Marks), Laboratory Rubrics (40 Marks)Document2 pages3 Monthly Test (20 Marks), Laboratory Rubrics (40 Marks)maheshboobalanNo ratings yet
- 3 Monthly Test (20 Marks), Laboratory Rubrics (40 Marks)Document2 pages3 Monthly Test (20 Marks), Laboratory Rubrics (40 Marks)maheshboobalanNo ratings yet
- Bionic LegDocument2 pagesBionic LegmaheshboobalanNo ratings yet
- WWW - Universityquestions.in: Department of Electrical and Electronics EngineeringDocument12 pagesWWW - Universityquestions.in: Department of Electrical and Electronics EngineeringmaheshboobalanNo ratings yet
- Forest EcosystemDocument21 pagesForest Ecosystemmaheshboobalan0% (1)
- Special News 04.12.2016Document3 pagesSpecial News 04.12.2016maheshboobalanNo ratings yet
- The Hindu Business Line /cbe /3.12.2016 / P 1 /P1Document1 pageThe Hindu Business Line /cbe /3.12.2016 / P 1 /P1maheshboobalanNo ratings yet
- Lib News 04.12.2016Document2 pagesLib News 04.12.2016maheshboobalanNo ratings yet
- Chronicle 3.12.2016Document1 pageChronicle 3.12.2016maheshboobalanNo ratings yet
- The Times of India / Cbe /5.12.2016 /P1Document3 pagesThe Times of India / Cbe /5.12.2016 /P1maheshboobalanNo ratings yet
- The Hindu 8.12.2016Document3 pagesThe Hindu 8.12.2016maheshboobalanNo ratings yet
- The Times of India 8.12.2016Document1 pageThe Times of India 8.12.2016maheshboobalanNo ratings yet
- Hindu 2Document1 pageHindu 2maheshboobalanNo ratings yet
- RapbehDocument1 pageRapbehTristan SisonNo ratings yet
- Supervisory Control and Data Acquisition (Scada) Systems For Command, Control Communications, Computer, Intelligence, Surveillance, and Reconnaissance (C4isr) FacilitiesDocument94 pagesSupervisory Control and Data Acquisition (Scada) Systems For Command, Control Communications, Computer, Intelligence, Surveillance, and Reconnaissance (C4isr) Facilitiessina20795No ratings yet
- A PID Controller For Real-Time DC Motor Speed Control Using The C505C Micro ControllerDocument6 pagesA PID Controller For Real-Time DC Motor Speed Control Using The C505C Micro Controllerbhargav103No ratings yet
- Boiler Tuning BasicDocument25 pagesBoiler Tuning Basictrung2iNo ratings yet
- Industrial Automation 4Document78 pagesIndustrial Automation 4Satyam SinghNo ratings yet
- Gear PumpDocument58 pagesGear Pumpsgupta_615796100% (5)
- Pumps&control SystemDocument103 pagesPumps&control Systemebin_thankachan1988No ratings yet
- Omniwheel Kiwi Drive Inverse KinematicDocument50 pagesOmniwheel Kiwi Drive Inverse KinematicHandriToarPangkeregoNo ratings yet
- Boiler Feedwater ControlDocument6 pagesBoiler Feedwater ControlMourougapragash SubramanianNo ratings yet
- Special Nonlinear Pid ControllersDocument25 pagesSpecial Nonlinear Pid ControllersawalmeidaNo ratings yet
- Advances in DCS SystemsDocument2 pagesAdvances in DCS SystemsreporterrajiniNo ratings yet
- To Perform SIL and PIL Testing On Fast D PDFDocument4 pagesTo Perform SIL and PIL Testing On Fast D PDFgil lerNo ratings yet
- Introduction To Automation: Basic Elements of An Automated System Advanced Automation Functions Level of AutomationDocument29 pagesIntroduction To Automation: Basic Elements of An Automated System Advanced Automation Functions Level of AutomationSyaiful MansyurNo ratings yet
- Control Valve Selection PDFDocument218 pagesControl Valve Selection PDFSyed Ali100% (2)
- PiddocsDocument50 pagesPiddocsscribsunilNo ratings yet
- Exp 6 Gas Temperature Process ControlDocument13 pagesExp 6 Gas Temperature Process Controlmohamad ashaziq100% (8)
- Control System Lab ManualDocument52 pagesControl System Lab ManualMohammad Umar RehmanNo ratings yet
- Analog Process Control and SensorsDocument27 pagesAnalog Process Control and SensorsMark Paul Santin Ganzalino100% (1)
- Valve Response Truth or Consequences by Gregory McMillan and Pierce Wu PDFDocument13 pagesValve Response Truth or Consequences by Gregory McMillan and Pierce Wu PDFThiago PécoraNo ratings yet
- A EG3200 Section 8 Controller (NXPowerLite)Document32 pagesA EG3200 Section 8 Controller (NXPowerLite)Halit YalçınkayaNo ratings yet
- Industrial Control SystemsDocument25 pagesIndustrial Control SystemsweilingkwayNo ratings yet
- Katalog DA21 2 en PDFDocument64 pagesKatalog DA21 2 en PDFCharlotte TorresNo ratings yet
- Technical Feedback EhtcDocument9 pagesTechnical Feedback EhtcPrashant Kumar ChoudharyNo ratings yet
- LNG Dynamic HysysDocument52 pagesLNG Dynamic HysysSrihari Kodimela75% (4)
- ATC DigitalDocument135 pagesATC Digitalpmads07No ratings yet
- FC102 - Control Pi EjemploDocument2 pagesFC102 - Control Pi Ejemplojose_balcazar89No ratings yet
- Process ControlDocument9 pagesProcess ControlRajalakshmi VengadasamyNo ratings yet
- VSD Pid ControlDocument8 pagesVSD Pid ControlSupriyo SajaNo ratings yet
- Modeling The Dynamic and Static Behavior of Chemical ProcessesDocument4 pagesModeling The Dynamic and Static Behavior of Chemical ProcessesFatma CahyaniNo ratings yet
- Governing System of Turbines (200 MW)Document18 pagesGoverning System of Turbines (200 MW)Debasish Dewan100% (2)
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (125)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (58)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (82)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachFrom EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachRating: 3.5 out of 5 stars3.5/5 (6)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4 out of 5 stars4/5 (6)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreFrom EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreRating: 4.5 out of 5 stars4.5/5 (33)
- Mini Farming: Self-Sufficiency on 1/4 AcreFrom EverandMini Farming: Self-Sufficiency on 1/4 AcreRating: 4 out of 5 stars4/5 (76)
- Process Plant Equipment: Operation, Control, and ReliabilityFrom EverandProcess Plant Equipment: Operation, Control, and ReliabilityRating: 5 out of 5 stars5/5 (1)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- The Knowledge: How to Rebuild Our World from ScratchFrom EverandThe Knowledge: How to Rebuild Our World from ScratchRating: 3.5 out of 5 stars3.5/5 (133)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- The Book of the Moon: A Guide to Our Closest NeighborFrom EverandThe Book of the Moon: A Guide to Our Closest NeighborRating: 4.5 out of 5 stars4.5/5 (11)
- The Assassination Complex: Inside the Government's Secret Drone Warfare ProgramFrom EverandThe Assassination Complex: Inside the Government's Secret Drone Warfare ProgramRating: 4 out of 5 stars4/5 (55)
- Project Management All-in-One For DummiesFrom EverandProject Management All-in-One For DummiesRating: 5 out of 5 stars5/5 (6)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (54)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)