You might also like
- Cognitive Development of Primary SchoolersDocument9 pagesCognitive Development of Primary SchoolersKVNDRW100% (2)
- Article 6 V4sldier Pile and LaggingDocument9 pagesArticle 6 V4sldier Pile and LaggingBambangBuwonoNo ratings yet
- Phased Array Probes - DopplerDocument10 pagesPhased Array Probes - DopplerNila Akter0% (1)
- MATLABDocument208 pagesMATLABJhonattan Pardo100% (1)
- Graphs of Polynomial FunctionsDocument38 pagesGraphs of Polynomial FunctionsEvelyn MaligayaNo ratings yet
- César Pérez López Auth. MATLAB Differential and Integral Calculus Apress 2014 PDFDocument220 pagesCésar Pérez López Auth. MATLAB Differential and Integral Calculus Apress 2014 PDFvictor farez100% (1)
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- MATLAB Differential and Integral CalculusDocument220 pagesMATLAB Differential and Integral CalculusjohnbohnNo ratings yet
- Matlab Slides IIIDocument26 pagesMatlab Slides IIIRicky LiunaNo ratings yet
- Project 3Document4 pagesProject 3Duvan Camilo Vargas CelyNo ratings yet
- Communication System Lab Manual: Department of Telecom Engineering University of Engineering and Technology TaxilaDocument10 pagesCommunication System Lab Manual: Department of Telecom Engineering University of Engineering and Technology Taxilamehrbilal mashooqNo ratings yet
- Dynamics and Vibrations MATLAB Tutorial: To Prepare For HW1, Do Sections 1-11.6 - You Can Do The Rest Later As NeededDocument49 pagesDynamics and Vibrations MATLAB Tutorial: To Prepare For HW1, Do Sections 1-11.6 - You Can Do The Rest Later As Neededmekyno32No ratings yet
- Scilab Optimization 201109Document6 pagesScilab Optimization 201109Yusuf HaqiqzaiNo ratings yet
- Introduction To MATLAB: Stefan Güttel October 15, 2020Document12 pagesIntroduction To MATLAB: Stefan Güttel October 15, 2020BorderBRENo ratings yet
- ODM2022 Tutorial-2Document4 pagesODM2022 Tutorial-2MENo ratings yet
- To Prepare For HW1, Do Sections 1-11.6 - You Can Do The Rest Later As NeededDocument49 pagesTo Prepare For HW1, Do Sections 1-11.6 - You Can Do The Rest Later As NeededvenkatadriKNo ratings yet
- MATLAB TutorialDocument50 pagesMATLAB Tutorialargoubi1984No ratings yet
- Fourier Series PDFDocument15 pagesFourier Series PDFVemula RamakrishnareddyNo ratings yet
- EE 331 - Signals and Systems: - A Must For All EE Engineers/researchersDocument29 pagesEE 331 - Signals and Systems: - A Must For All EE Engineers/researchersGokhan YassibasNo ratings yet
- MatodeDocument11 pagesMatodeVijayaraghavan GNo ratings yet
- Matlab IntroDocument8 pagesMatlab Introo0sorel0oNo ratings yet
- Matlab by Rajesh Bandari YadavDocument55 pagesMatlab by Rajesh Bandari Yadavhyma kadakatla100% (2)
- MATLAB Tutorial 2021Document50 pagesMATLAB Tutorial 2021Hana HanounaNo ratings yet
- Veoma Vazno - MatlabDocument9 pagesVeoma Vazno - MatlabAndjelkaStankovicNo ratings yet
- N.O. Study GuideDocument7 pagesN.O. Study GuidePiyush AgrahariNo ratings yet
- Lab 01Document8 pagesLab 01ALISHBA AZAMNo ratings yet
- The Islamia University of BahawalpurDocument17 pagesThe Islamia University of BahawalpurMuhammad Adnan MalikNo ratings yet
- Chapter 04 - Symbolic Variables: DeclaringDocument3 pagesChapter 04 - Symbolic Variables: DeclaringDavid CapitalNo ratings yet
- Solving ODE in MATLAB: P. Howard Fall 2009Document23 pagesSolving ODE in MATLAB: P. Howard Fall 2009Tanmaya ChughNo ratings yet
- Linear AlgebraDocument5 pagesLinear Algebracarminavelasco21No ratings yet
- ECE673 - Week1 - Lecture - With FiguresDocument26 pagesECE673 - Week1 - Lecture - With Figures蒋宇博No ratings yet
- MANU2206 Week03 PDFDocument52 pagesMANU2206 Week03 PDFSon TrinhNo ratings yet
- Supplementary Material: 1 Creating VectorsDocument4 pagesSupplementary Material: 1 Creating VectorsAnh QuocNo ratings yet
- Exercise No. 4: Linear ProgrammingDocument2 pagesExercise No. 4: Linear Programmingcarminavelasco21No ratings yet
- Commands in Matlab To Obtain The Solution of Ordinary Differential Equations (Ode) and System of OdesDocument21 pagesCommands in Matlab To Obtain The Solution of Ordinary Differential Equations (Ode) and System of Odesআসিফ রেজাNo ratings yet
- Linear Algebra: 1 ObjectiveDocument11 pagesLinear Algebra: 1 ObjectiveAnh QuocNo ratings yet
- Lecture1 MatlabDocument55 pagesLecture1 Matlabapi-3824811No ratings yet
- Machine Learning in MATLAB: Roland MemisevicDocument16 pagesMachine Learning in MATLAB: Roland MemisevicRupesh SushirNo ratings yet
- Matlab With Matrices: WMAT1010 Lesson 2.6Document6 pagesMatlab With Matrices: WMAT1010 Lesson 2.6SujithNo ratings yet
- Introduction To Matlab Tutorial 11Document37 pagesIntroduction To Matlab Tutorial 11James Edward TrollopeNo ratings yet
- Tutorial 1 Getting Started With MATLABDocument142 pagesTutorial 1 Getting Started With MATLABSoavan SahuNo ratings yet
- Lab Report 01Document7 pagesLab Report 01Muhammad Umer FarooqNo ratings yet
- Module 7 B Solving Linear Inequalities Using Linear ProgrammingDocument11 pagesModule 7 B Solving Linear Inequalities Using Linear ProgrammingKick YumNo ratings yet
- S.Thota An Introduction To Maple AMS 2012, Allahabad 1 / 21Document21 pagesS.Thota An Introduction To Maple AMS 2012, Allahabad 1 / 21ThôngĐiệp GửiBạnNo ratings yet
- 3 orDocument68 pages3 orYuri BrasilkaNo ratings yet
- Matlab1 2022-1Document3 pagesMatlab1 2022-1kyledang277No ratings yet
- Spring 2004: Electrmagnetics Fields and WavesDocument6 pagesSpring 2004: Electrmagnetics Fields and WavesAli AhmadNo ratings yet
- 1.1 Homework Set No. 1: Problem 1Document4 pages1.1 Homework Set No. 1: Problem 1kelbmutsNo ratings yet
- Matlab Manual1Document13 pagesMatlab Manual1venkatcharmsNo ratings yet
- Introduction To MATLAB - OverviewDocument52 pagesIntroduction To MATLAB - OverviewBaha HasanNo ratings yet
- PDF - ALL LecturesDocument53 pagesPDF - ALL LecturesAywb Kh HamadNo ratings yet
- Optimization Using Symbolic Derivatives: MATLAB DigestDocument3 pagesOptimization Using Symbolic Derivatives: MATLAB DigestDaniela DanielNo ratings yet
- Nonlinear Systems ScilabDocument12 pagesNonlinear Systems ScilabCarlos Soza RossNo ratings yet
- MAST10008 Accelerated Mathematics 1 - Lab 2Document4 pagesMAST10008 Accelerated Mathematics 1 - Lab 2vanessa8pangestuNo ratings yet
- Digital Signal Processing Lab: Vishavjit Singh CSE-1 (6 Sem) 0581322707Document22 pagesDigital Signal Processing Lab: Vishavjit Singh CSE-1 (6 Sem) 0581322707rsdelhi123No ratings yet
- DSP Using Matlab® - 1Document22 pagesDSP Using Matlab® - 1api-3721164No ratings yet
- MatlabDocument9 pagesMatlabHassan Al AtabyNo ratings yet
- Lab Report MatlabDocument43 pagesLab Report MatlabRana Hamza Muhammad YousafNo ratings yet
- Computer Applications - 1'st CourseDocument31 pagesComputer Applications - 1'st CourseMohammad ShakeebNo ratings yet
- SNS Lab 02 SP 20Document16 pagesSNS Lab 02 SP 20I190845 Samana NayyabNo ratings yet
- Multiobjective Optimization Scilab PDFDocument11 pagesMultiobjective Optimization Scilab PDFNiki Veranda Agil PermadiNo ratings yet
- Experiment 01Document10 pagesExperiment 01Zeynal Abidin ŞabaşNo ratings yet
- Borgwarneredrive PDFDocument34 pagesBorgwarneredrive PDFddstoneNo ratings yet
- Product Manual: Panel Mounted ControllerDocument271 pagesProduct Manual: Panel Mounted ControllerLEONARDO FREITAS COSTANo ratings yet
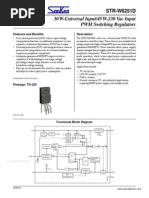
- Datasheet PDFDocument15 pagesDatasheet PDFperro sNo ratings yet
- ISEB CE CASE Mathematics 13 Specification 2020 11.22Document35 pagesISEB CE CASE Mathematics 13 Specification 2020 11.22agastyazadNo ratings yet
- Arithmetic Progressons (Part-1)Document16 pagesArithmetic Progressons (Part-1)shambhaviNo ratings yet
- 3 Paramater Untuk Men-Synchron-Kan Komunikasi: Set 2 For Modbus CommunicationDocument5 pages3 Paramater Untuk Men-Synchron-Kan Komunikasi: Set 2 For Modbus CommunicationAhmad FathurachmanNo ratings yet
- Service Bulletin RT-18.4: Technical Information To All Owners / Operators of Wärtsilä RTA and RT-flex EnginesDocument14 pagesService Bulletin RT-18.4: Technical Information To All Owners / Operators of Wärtsilä RTA and RT-flex Engineszbkt07No ratings yet
- P521 OrderForm - V18 - 09 - 2014Document11 pagesP521 OrderForm - V18 - 09 - 2014Pakde NdokNo ratings yet
- Ray Tracing Algorithms - Theory and Practice: 1 Photographic Realism in Computer GraphicsDocument29 pagesRay Tracing Algorithms - Theory and Practice: 1 Photographic Realism in Computer Graphicschuck212No ratings yet
- Manual de AVERIAS Codigos SC RICOH MP C4500Document84 pagesManual de AVERIAS Codigos SC RICOH MP C4500Erika Velásquez100% (1)
- Chapter 6 - SectioningDocument44 pagesChapter 6 - SectioningShaktivell LetchumananNo ratings yet
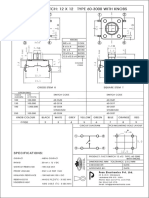
- Tact Micro Switch 12X12Document1 pageTact Micro Switch 12X12Solin CozNo ratings yet
- Nünning - Literary Studies. Theories, Models and Methods (Excerpts)Document2 pagesNünning - Literary Studies. Theories, Models and Methods (Excerpts)E KNo ratings yet
- Elx FW FC 8g-F1.11a7-B5.11x2 Linux-Bc 32-64Document52 pagesElx FW FC 8g-F1.11a7-B5.11x2 Linux-Bc 32-64mail2rajajiNo ratings yet
- Java Vocabulary PDFDocument2 pagesJava Vocabulary PDFpearl042008No ratings yet
- Factorising Quadratics AnswersDocument2 pagesFactorising Quadratics AnswersMaedot HaddisNo ratings yet
- Differential Equation Evaluation (Quiz) : D. Fourth OrderDocument3 pagesDifferential Equation Evaluation (Quiz) : D. Fourth OrderArmenion Mark AllenNo ratings yet
- Laplace Transformation TableDocument1 pageLaplace Transformation TableDjNo ratings yet
- Manual Hameg 3010Document27 pagesManual Hameg 3010Yéred Josué Rugama MontenegroNo ratings yet
- Supplement To Chapter 6: Linear Programming: Answers To Discussion and Review QuestionsDocument37 pagesSupplement To Chapter 6: Linear Programming: Answers To Discussion and Review Questionsma_sadam100% (1)
- Project Synopsis Project Title:: Design and Verification of Soc Bus BridgeDocument5 pagesProject Synopsis Project Title:: Design and Verification of Soc Bus BridgeVishwath BhandaryNo ratings yet
- Chapter 4 Semantic Roles - NOTESDocument8 pagesChapter 4 Semantic Roles - NOTESWaad MajidNo ratings yet
- Jurnal AutorefractometerDocument11 pagesJurnal AutorefractometerNeida Valeria DanunNo ratings yet
- VD 2Document4 pagesVD 2Hồ BảoNo ratings yet
- Switchgear and Controlgear AssembliesDocument4 pagesSwitchgear and Controlgear AssembliesJon LopezNo ratings yet