You might also like
- Tableros EléctricosDocument19 pagesTableros EléctricosJasser CahuiNo ratings yet
- G8-Esfuerzos Electrodinámicos en Tbt.Document30 pagesG8-Esfuerzos Electrodinámicos en Tbt.Jasser CahuiNo ratings yet
- 5.2 Memoria Calculo Ie PDFDocument39 pages5.2 Memoria Calculo Ie PDFJasser CahuiNo ratings yet
- Mantenimiento de Tableros EléctricosDocument31 pagesMantenimiento de Tableros EléctricosJasser Cahui100% (2)
- Semana 1Document4 pagesSemana 1Jasser CahuiNo ratings yet
- Calculo de Lineas y Redes Electric AsDocument356 pagesCalculo de Lineas y Redes Electric AsTino RuizNo ratings yet
- Criterios LLTTDocument82 pagesCriterios LLTTJasser CahuiNo ratings yet
- Problemas Control II Grupo2Document37 pagesProblemas Control II Grupo2Jasser CahuiNo ratings yet
- Trab Lineas de TransmisionDocument6 pagesTrab Lineas de TransmisionJasser CahuiNo ratings yet
- Microsoft Project La Curva SDocument2 pagesMicrosoft Project La Curva SJasser CahuiNo ratings yet
- Extender Un Cable USB Por UTPDocument5 pagesExtender Un Cable USB Por UTPJasser Cahui100% (1)
- Energy Ball DatosDocument7 pagesEnergy Ball DatosJasser CahuiNo ratings yet
- Proceso de ProducciónDocument2 pagesProceso de ProducciónJasser Cahui0% (1)
- Calculo de Potencia de SoldaduraDocument3 pagesCalculo de Potencia de SoldaduraJasser CahuiNo ratings yet
- Laboratorio Final de Funcion de TransferenciaDocument35 pagesLaboratorio Final de Funcion de TransferenciaJasser CahuiNo ratings yet
- Transformadores de Medida y Proteccion HMDocument112 pagesTransformadores de Medida y Proteccion HMJasser CahuiNo ratings yet
- Calculo Mecanico de Vanos DesniveladosDocument11 pagesCalculo Mecanico de Vanos DesniveladosJasser CahuiNo ratings yet
- Gato Tipo TijeraDocument5 pagesGato Tipo TijeraFernando A. TorresNo ratings yet
- 04 Arquitectura ISADocument21 pages04 Arquitectura ISADany MaldonadoNo ratings yet
- COMPROBANTESDocument30 pagesCOMPROBANTESBarajas ChavezNo ratings yet
- Programa Tentativo UICDocument1 pagePrograma Tentativo UICCadena 3No ratings yet
- Transfer Maker Manual CHA-27Document25 pagesTransfer Maker Manual CHA-27Ivan SaladinoNo ratings yet
- Introduccion JavaDocument23 pagesIntroduccion JavaAngel ToapantaNo ratings yet
- Linea de Tiempo InformaticaDocument9 pagesLinea de Tiempo Informaticamildrey gonzalezNo ratings yet
- Ejemplos de La Metodologia de Los Sistemas BlandosDocument8 pagesEjemplos de La Metodologia de Los Sistemas Blandosasd pepe100% (1)
- Capitulo 3 NSR10 Vanesa SanabriaDocument12 pagesCapitulo 3 NSR10 Vanesa SanabriaVanessa Sanabria AraqueNo ratings yet
- CARTILLA EDUCACION TECNOLOGICA 2do Año (1) FavaloroDocument32 pagesCARTILLA EDUCACION TECNOLOGICA 2do Año (1) FavaloroCüervä AvtNo ratings yet
- Habilidades para El Siglo XXI Mariana Maggio Cap 3Document20 pagesHabilidades para El Siglo XXI Mariana Maggio Cap 3Claudia ZimmermannNo ratings yet
- Concurso de Merito y Oposicion 19 20Document4 pagesConcurso de Merito y Oposicion 19 20Argenis ParraNo ratings yet
- Meso Ayerdi - Un Nuevo Tipo de Profesional Llama A Las Puertas Del PeriodismoDocument16 pagesMeso Ayerdi - Un Nuevo Tipo de Profesional Llama A Las Puertas Del PeriodismoAlfredoHugoMarioCeciseNo ratings yet
- Guía Rápida PadletDocument10 pagesGuía Rápida Padleteduardo garinNo ratings yet
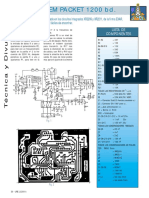
- Modem Packet 1200 BaudiosDocument2 pagesModem Packet 1200 BaudiosExperiment BarthNo ratings yet
- Manual LiquiLaser BASIC2 6040Document27 pagesManual LiquiLaser BASIC2 6040Pedro CataneseNo ratings yet
- Trace ERP - Requisitos para Instalación - Ver 1.4 PDFDocument3 pagesTrace ERP - Requisitos para Instalación - Ver 1.4 PDFMca GarridoNo ratings yet
- Reutilización de FrecuenciasDocument4 pagesReutilización de FrecuenciasNicolas Godoy MorenoNo ratings yet
- Catalogo Ergoform 2023Document32 pagesCatalogo Ergoform 2023santiagocerano3No ratings yet
- 1.2 Clasificación Por La Ubicación de Los InyectoresDocument13 pages1.2 Clasificación Por La Ubicación de Los InyectoresJoseph CaceresNo ratings yet
- Organizador GraficoDocument2 pagesOrganizador Graficowillian cañarNo ratings yet
- Electricidad Automotriz 12Document77 pagesElectricidad Automotriz 12daniel larrea vasconezNo ratings yet
- Laboratorio N°04 Micronanoelectronica Guerrero Cueva Angel Joel - 15190113Document16 pagesLaboratorio N°04 Micronanoelectronica Guerrero Cueva Angel Joel - 15190113AngelGuerreroNo ratings yet
- POSTER Analisi Cinematicon de La Falla San JuanDocument1 pagePOSTER Analisi Cinematicon de La Falla San JuanDenilson Nicolas Mendoza RiveraNo ratings yet
- Kaso U1 A3Document10 pagesKaso U1 A3Efra RinconNo ratings yet
- Micro Curriculo Dibujo de IngenieriaDocument5 pagesMicro Curriculo Dibujo de IngenieriaKatty GonzalezNo ratings yet
- Arbol Critico de La CalidadDocument1 pageArbol Critico de La CalidadAnahi TorranoNo ratings yet
- Lab. 03 Control Potencia FrecuenciaDocument7 pagesLab. 03 Control Potencia FrecuenciaJose Ivan CuetoNo ratings yet
- Actividad de Aprendizaje 17,2Document7 pagesActividad de Aprendizaje 17,2Jeffer SaenzNo ratings yet
- Factura Electrónica TELCEL GC08684013Document5 pagesFactura Electrónica TELCEL GC08684013Alan Teixeira100% (1)