You might also like
- Arnold For Maya User Guide: SearchDocument2 pagesArnold For Maya User Guide: SearchrendermanuserNo ratings yet
- CBZ90 Sampler PDFDocument9 pagesCBZ90 Sampler PDFrendermanuserNo ratings yet
- Maya 3Ds Max Softimage: KatanaDocument1 pageMaya 3Ds Max Softimage: KatanarendermanuserNo ratings yet
- Prman NotesDocument9 pagesPrman NotesrendermanuserNo ratings yet
- CBZ90 Sampler PDFDocument9 pagesCBZ90 Sampler PDFrendermanuserNo ratings yet
- Correct Death Registration in 40 CharactersDocument3 pagesCorrect Death Registration in 40 CharactersrendermanuserNo ratings yet
- Comic Design SamplerDocument1 pageComic Design SamplerrendermanuserNo ratings yet
- MultiverseDocument2 pagesMultiverserendermanuserNo ratings yet
- Multiverse WorkflowsDocument1 pageMultiverse WorkflowsrendermanuserNo ratings yet
- Katana Viewer A Pi Getting Started GuideDocument30 pagesKatana Viewer A Pi Getting Started GuiderendermanuserNo ratings yet
- Fusion 8 Scripting GuideDocument217 pagesFusion 8 Scripting GuideAvinash JagarlamudiNo ratings yet
- Cartooning Jobs For Beginning CartoonistsDocument2 pagesCartooning Jobs For Beginning CartoonistsrendermanuserNo ratings yet
- Building Survey Property Address PreviewDocument47 pagesBuilding Survey Property Address PreviewrendermanuserNo ratings yet
- How to Avoid Rejection at SIGGRAPHDocument4 pagesHow to Avoid Rejection at SIGGRAPHrendermanuserNo ratings yet
- Hydra Pixar Presentation S5327-Jeremy-CowlesDocument23 pagesHydra Pixar Presentation S5327-Jeremy-CowlesrendermanuserNo ratings yet
- GDM February 2009Document68 pagesGDM February 2009rendermanuserNo ratings yet
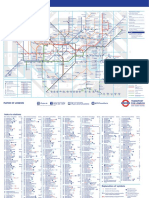
- Standard Tube Map PDFDocument2 pagesStandard Tube Map PDFrendermanuserNo ratings yet
- BG Painting TipsDocument3 pagesBG Painting TipsrendermanuserNo ratings yet
- AnimDessin2 User Guide 01Document2 pagesAnimDessin2 User Guide 01rendermanuser100% (1)
- AnimCouleur2 User Guide 01Document2 pagesAnimCouleur2 User Guide 01rendermanuserNo ratings yet
- Toonstyle Tips (Smallpdf - Com)Document6 pagesToonstyle Tips (Smallpdf - Com)rendermanuserNo ratings yet
- The Know How of CartooningDocument49 pagesThe Know How of CartooningrendermanuserNo ratings yet
- Illustration MagDocument16 pagesIllustration MagrendermanuserNo ratings yet
- Magic Color Flair The World of Mary Blair PDFDocument20 pagesMagic Color Flair The World of Mary Blair PDFrendermanuser100% (2)
- Nodal Scene InterfaceDocument51 pagesNodal Scene InterfacerendermanuserNo ratings yet
- Animation Andrew SelbyDocument217 pagesAnimation Andrew Selbyrendermanuser92% (13)
- Pythonforkatana 170326112919Document37 pagesPythonforkatana 170326112919rendermanuserNo ratings yet
- How To Read A Skull Like An Open BookDocument8 pagesHow To Read A Skull Like An Open BookrendermanuserNo ratings yet
- Comic Artists - WorkingMethodsDocument36 pagesComic Artists - WorkingMethodsrendermanuserNo ratings yet
- Maya Python A PiDocument582 pagesMaya Python A Pirendermanuser100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A5 Datasheet 1.9.60Document22 pagesA5 Datasheet 1.9.60Sergio Eduardo Figueroa Arias0% (1)
- Animation Industry of PakistanDocument50 pagesAnimation Industry of PakistanSaad Afridi83% (6)
- DrawDocument23 pagesDrawJoy Jeon75% (8)
- tdw66 InfiniteworldsDocument4 pagestdw66 InfiniteworldsKALFERNo ratings yet
- Gamma Correct v12 PDFDocument10 pagesGamma Correct v12 PDFGomesGilzamirNo ratings yet
- 10 1 1 1 6269 PDFDocument231 pages10 1 1 1 6269 PDFAlfisyahr Fauziah MagfirahNo ratings yet
- Media & Entertainment Collection BrochureDocument1 pageMedia & Entertainment Collection BrochureJulian Kene MbakweNo ratings yet
- Camera MatchingDocument10 pagesCamera MatchingcleristonmarquesNo ratings yet
- Alias - Wavefront BasicToolsDocument620 pagesAlias - Wavefront BasicToolsEdHienaNo ratings yet
- SketchUp VR - Basic Vray Sketchup Tutorial Series 1 by NomeradonaDocument11 pagesSketchUp VR - Basic Vray Sketchup Tutorial Series 1 by NomeradonaRafa MdsNo ratings yet
- 2D Game: 1.1 Computer GraphicsDocument16 pages2D Game: 1.1 Computer GraphicsYukta LapsiyaNo ratings yet
- Imvu Accessories How ToDocument32 pagesImvu Accessories How Tohanswatson100% (6)
- Syllabus For Autodesk AUTOCADDocument2 pagesSyllabus For Autodesk AUTOCADRam Nepali100% (6)
- AutoCAD Keyboard Commands & Shortcuts Guide - AutodeskDocument13 pagesAutoCAD Keyboard Commands & Shortcuts Guide - Autodeskgusyahri001No ratings yet
- VRay - Render - SettingsDocument10 pagesVRay - Render - SettingsBia CristinaNo ratings yet
- VFX Terminology GuideDocument30 pagesVFX Terminology GuideRevival OngoleNo ratings yet
- Lightscape User GuideDocument362 pagesLightscape User Guideben_65No ratings yet
- ShiVa3D TheHunt TheMakingOfDocument92 pagesShiVa3D TheHunt TheMakingOfHarun KibirigeNo ratings yet
- Advantages of Using 3D Architectural RenderingDocument10 pagesAdvantages of Using 3D Architectural RenderingArmalis ArsitekNo ratings yet
- Oculus Mobile UnityDocument47 pagesOculus Mobile UnityAnonymous qfWSjlNo ratings yet
- 3D World - November 2018 UKDocument100 pages3D World - November 2018 UKJorge del Toro CabreraNo ratings yet
- GPU Software Rasterization and Voxelization for Graphics ResearchDocument40 pagesGPU Software Rasterization and Voxelization for Graphics ResearchyurymikNo ratings yet
- Nuke 8.0v1 ReleaseNotesDocument28 pagesNuke 8.0v1 ReleaseNotesJose Luis VacaflorNo ratings yet
- Documentation CloudCompare Version 2 1 EngDocument68 pagesDocumentation CloudCompare Version 2 1 EngSilvia ChioreanNo ratings yet
- Acg01 IntroDocument34 pagesAcg01 IntroGiang T.C. TranNo ratings yet
- CG01 History ApplicationsDocument54 pagesCG01 History ApplicationsManishKakatiNo ratings yet
- Realization of Seurat's Pointillism Via Non-Photorealistic RenderingDocument20 pagesRealization of Seurat's Pointillism Via Non-Photorealistic RenderingPeng LiNo ratings yet
- Toon Boom Toon Boom Studio: 2D/3D IntegrationDocument12 pagesToon Boom Toon Boom Studio: 2D/3D IntegrationMohammed MahmoudNo ratings yet
- Citra Log - Txt.oldDocument116 pagesCitra Log - Txt.oldNugroho SulistiyoNo ratings yet
- An Introduction To AerialodDocument25 pagesAn Introduction To AerialodKoffivich Djagnikpo de KpedenouNo ratings yet