You might also like
- VLSI Design Lab EC-16203 Experiment 5Document6 pagesVLSI Design Lab EC-16203 Experiment 5Brajesh SainiNo ratings yet
- Digital Circuits (2) - CH - 3 - Problems SolutionDocument7 pagesDigital Circuits (2) - CH - 3 - Problems Solutionjameg20458No ratings yet
- Digital Logic Design Lab Report 4Document26 pagesDigital Logic Design Lab Report 4Saim AshrafNo ratings yet
- Verilog Codes For Combinational Ciruits Along With Their Test BenchDocument28 pagesVerilog Codes For Combinational Ciruits Along With Their Test BenchRohitSingh100% (1)
- VLSI Lab Report 8Document24 pagesVLSI Lab Report 8Umar AyubNo ratings yet
- Computer Architecture Lab 5aDocument9 pagesComputer Architecture Lab 5aHasan IqbalNo ratings yet
- 20el100 Ass-2 2el42Document20 pages20el100 Ass-2 2el42Dhruv GorNo ratings yet
- Birla Institute of Technology & Science, Pilani Lab Sheet - 2 Topic: Combinational Circuit ModelingDocument7 pagesBirla Institute of Technology & Science, Pilani Lab Sheet - 2 Topic: Combinational Circuit ModelingSATYAVRAT SHARMANo ratings yet
- Lab 5Document13 pagesLab 5SHAHZAIB AHMAD QURESHINo ratings yet
- Dataflow Modelling: 1) Logic GatesDocument39 pagesDataflow Modelling: 1) Logic Gateslilly jamesNo ratings yet
- Problem 3) Implementation of Problem1 Using Synopsys CodeDocument22 pagesProblem 3) Implementation of Problem1 Using Synopsys CodeGowtham HariNo ratings yet
- Ver I Log ExamplesDocument22 pagesVer I Log ExamplesDayanand Gowda KrNo ratings yet
- Digital Logic Lab Report #4Document26 pagesDigital Logic Lab Report #4HaiderNo ratings yet
- VLSI Lab Manual Exercise ProblemsDocument38 pagesVLSI Lab Manual Exercise ProblemsPrakhar Kumar100% (1)
- LAB FAT QUESTIONS ANALYSISDocument15 pagesLAB FAT QUESTIONS ANALYSISSrinivasan UmaNo ratings yet
- Uday Intern Project Original 2Document42 pagesUday Intern Project Original 2Udaykiran PendemNo ratings yet
- Suhas N (Lab Assign 1,2,3)Document37 pagesSuhas N (Lab Assign 1,2,3)Suhas PoliNo ratings yet
- Digital system design lab task 1Document19 pagesDigital system design lab task 1Sathvik MuppidiNo ratings yet
- Verilog HDL Synthesis and ImplementationDocument41 pagesVerilog HDL Synthesis and ImplementationAlexandru OleinicNo ratings yet
- ELEC 3200 Advanced Digital Circuit Design Lab 7Document5 pagesELEC 3200 Advanced Digital Circuit Design Lab 7ZebNo ratings yet
- HDL Manual (18ecl58)Document20 pagesHDL Manual (18ecl58)lohith sNo ratings yet
- Verilog Implementation of D Flip-Flop, 16-Bit Shift Register, Logic Function Primitive & JK Flip-FlopDocument8 pagesVerilog Implementation of D Flip-Flop, 16-Bit Shift Register, Logic Function Primitive & JK Flip-FlopPranavkumar PatilNo ratings yet
- DLD Report Lab Sessional-IIDocument9 pagesDLD Report Lab Sessional-IIKen GamingNo ratings yet
- Programming For Beginners Java Tutorial#1 - SolutionDocument4 pagesProgramming For Beginners Java Tutorial#1 - SolutionHNo ratings yet
- Arithmetic and Logic UnitDocument6 pagesArithmetic and Logic UnitVikas KumarNo ratings yet
- Digital Circuits (2) - CH - 4 - Problems #2Document7 pagesDigital Circuits (2) - CH - 4 - Problems #2jameg20458No ratings yet
- HDL (Repaired)Document104 pagesHDL (Repaired)Vikas PakhretiaNo ratings yet
- Activity 2 Behavioral Modeling QuidlatDocument5 pagesActivity 2 Behavioral Modeling Quidlatedrian quidlatNo ratings yet
- 1.design For 4:1 MuxDocument83 pages1.design For 4:1 MuxKoushik GaneshNo ratings yet
- cs429 Lab4Document9 pagescs429 Lab4YASH KUMAR SINGHNo ratings yet
- Assembly Language and Computer Organization ExplainedDocument68 pagesAssembly Language and Computer Organization ExplainedNicolas AmezquitaNo ratings yet
- Soln To hw5Document4 pagesSoln To hw5Iven Rey B. TañaraNo ratings yet
- lab results vlsiDocument18 pageslab results vlsipankaj rangareeNo ratings yet
- Eda LabrecordDocument71 pagesEda Labrecordteja roopNo ratings yet
- Verilog Updated ProgramsDocument47 pagesVerilog Updated Programsanand_duraiswamy100% (1)
- Digital Logic Design: Assignment# 3Document8 pagesDigital Logic Design: Assignment# 3Zojaan AheerNo ratings yet
- Combinational Designs: VerilogDocument67 pagesCombinational Designs: Verilogdivakaran sundarNo ratings yet
- ECE 464 / ECE 520: Final 2006Document12 pagesECE 464 / ECE 520: Final 2006Bruno SilvaNo ratings yet
- Tutorial Example 5-1: A B C P4Document20 pagesTutorial Example 5-1: A B C P4troid426No ratings yet
- 18ecl58 HDL Lab 2020Document16 pages18ecl58 HDL Lab 2020sureshfm170% (10)
- Vlsi Manual 1Document54 pagesVlsi Manual 1jogeorge85No ratings yet
- 1.basic Gates and or Nor NandDocument32 pages1.basic Gates and or Nor NandmrajkumarpatelNo ratings yet
- Verilog Basic Logic Gates and MultiplexersDocument35 pagesVerilog Basic Logic Gates and MultiplexersVij AyNo ratings yet
- Digital Design Lab (Ec661) Experiment N0.:1: Brief Description of WorkDocument63 pagesDigital Design Lab (Ec661) Experiment N0.:1: Brief Description of WorkBhaskar KNo ratings yet
- Using Sensitivity List, STD - Logic and STD - Logic - VectorDocument3 pagesUsing Sensitivity List, STD - Logic and STD - Logic - VectorMarco RoldanNo ratings yet
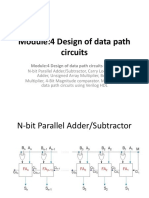
- Module:4 Design of Data Path Circuits 6 HoursDocument44 pagesModule:4 Design of Data Path Circuits 6 HoursSahana MecheriNo ratings yet
- NC LaunchDocument40 pagesNC LaunchKamalpreet KaurNo ratings yet
- Verilog - Multiplexer PDFDocument5 pagesVerilog - Multiplexer PDFRashed IslamNo ratings yet
- DSD Lab1Document8 pagesDSD Lab1Muazam MalikNo ratings yet
- Embedded Systems COE23Document37 pagesEmbedded Systems COE23Ishita SharmaNo ratings yet
- Realization of All Logic Gates With HDL CodeDocument58 pagesRealization of All Logic Gates With HDL CodekrishnagdeshpandeNo ratings yet
- Vlsi Lab Manual Exp3Document6 pagesVlsi Lab Manual Exp3Huỳnh Mạnh CườngNo ratings yet
- Wa0005.Document39 pagesWa0005.arfanss512No ratings yet
- 4x1 Mux, 3x8 Decoder & 8x3 Priority Encoder Behavioral ModelsDocument10 pages4x1 Mux, 3x8 Decoder & 8x3 Priority Encoder Behavioral ModelsSuyash MishraNo ratings yet
- PPPPPPPPP P PPPPDocument9 pagesPPPPPPPPP P PPPPsree_rajen1388No ratings yet
- Rahman Assignment 2Document6 pagesRahman Assignment 2Altair Ibn La AhadNo ratings yet
- Experiment-1 Combinational CircuitsDocument15 pagesExperiment-1 Combinational CircuitsAvinashNo ratings yet
- Design Synthesis of Verilog Modules and CountersDocument35 pagesDesign Synthesis of Verilog Modules and Countersinwoman_249546987No ratings yet
- Openmax Call SequencesDocument24 pagesOpenmax Call SequencesVirtualThreadNo ratings yet
- Cadence - 20nm - QaDocument6 pagesCadence - 20nm - Qaramdas1991No ratings yet
- Course Description M.E. Embedded SystemsDocument4 pagesCourse Description M.E. Embedded Systemsramdas1991No ratings yet
- Course Description M.E. Embedded SystemsDocument4 pagesCourse Description M.E. Embedded Systemsramdas1991No ratings yet
- Mini-UART: Recommended Digital Logic BackgroundDocument4 pagesMini-UART: Recommended Digital Logic Backgroundramdas1991No ratings yet
- ProgsDocument20 pagesProgsramdas1991No ratings yet
- M.S. Embedded SystemsDocument1 pageM.S. Embedded Systemsramdas1991No ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- IESA ESDM Map of India PDFDocument1 pageIESA ESDM Map of India PDFramdas1991No ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- GD 23Document1 pageGD 23ramdas1991No ratings yet
- Genuine PassDocument1 pageGenuine Passramdas1991No ratings yet
- Cancelling The Effect of The Bias Resistance by BootstrappingDocument1 pageCancelling The Effect of The Bias Resistance by Bootstrappingramdas1991No ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Devi MahatmyamDocument13 pagesDevi Mahatmyamsundeepmv5483100% (1)
- Field Theroy Formulaes RevisedDocument7 pagesField Theroy Formulaes Revisedramdas1991No ratings yet
- Cream Biscuits:: Tarts (Using Short Crusts Pastry)Document12 pagesCream Biscuits:: Tarts (Using Short Crusts Pastry)ramdas1991No ratings yet
- Dec50143 PW4Document8 pagesDec50143 PW4Muhammad JazliNo ratings yet
- Series230 Ats c1000 Controller Manual v230 20180115Document22 pagesSeries230 Ats c1000 Controller Manual v230 20180115aarian100% (1)
- Anna University Affiliated Colleges Exam Code Number PDFDocument13 pagesAnna University Affiliated Colleges Exam Code Number PDFraja30gNo ratings yet
- Final Year Project Center CoimbatoreDocument15 pagesFinal Year Project Center Coimbatorecoimbatore projectNo ratings yet
- 3G SSV Drive Test Methodology & KPIsDocument31 pages3G SSV Drive Test Methodology & KPIsSyed Adil AliNo ratings yet
- Direct: CNC Machining CentreDocument2 pagesDirect: CNC Machining CentreRivas IsaacNo ratings yet
- AARNOVA Energy Solutions: AARNOVA Technologies PVT LTD 2018Document23 pagesAARNOVA Energy Solutions: AARNOVA Technologies PVT LTD 2018Shisher SNo ratings yet
- Online Doctor Appointment App Streamlines Healthcare AccessDocument4 pagesOnline Doctor Appointment App Streamlines Healthcare AccessFassy ur RehmanNo ratings yet
- Firewall Audit Check ListDocument7 pagesFirewall Audit Check ListIsaiahNo ratings yet
- Generative AI-v4Document17 pagesGenerative AI-v4James Siva Kumar100% (1)
- 7th Semester-2019-Internet Technology (IT701) SDocument3 pages7th Semester-2019-Internet Technology (IT701) Sप्रतीक प्रकाशNo ratings yet
- B CoefficientDocument50 pagesB CoefficientHimanshu Gupta0% (1)
- The Systems Development Life Cycle (SDLC)Document49 pagesThe Systems Development Life Cycle (SDLC)Sanam ChouhanNo ratings yet
- 3.1.2.7 Packet Tracer - Investigating A VLAN Implementation InstructionsDocument4 pages3.1.2.7 Packet Tracer - Investigating A VLAN Implementation InstructionsButterfinger211100% (1)
- 4-C - AdvancedDocument32 pages4-C - AdvancedJust9dayNo ratings yet
- Fire Suppression Notes SummaryDocument3 pagesFire Suppression Notes SummarydomcristiniNo ratings yet
- Control Cloud Data Access Privilege and Anonymity With Fully Anonymous Attribute-Based EncryptionDocument7 pagesControl Cloud Data Access Privilege and Anonymity With Fully Anonymous Attribute-Based EncryptionChaitanya DachepallyNo ratings yet
- Hdhomerun HTTP DevelopmentDocument3 pagesHdhomerun HTTP Developmentfrancisca ulloa riveraNo ratings yet
- DRC Exam Reviewer 2023 PDF 1Document7 pagesDRC Exam Reviewer 2023 PDF 1kuroakashiteNo ratings yet
- Firmware Change/Update SONY Xperia X Performance: Necessary Tools and DriversDocument19 pagesFirmware Change/Update SONY Xperia X Performance: Necessary Tools and DriversPadloe BmjNo ratings yet
- HPT906 Standard Industry Compact Hydraulic Pressure TransducerDocument6 pagesHPT906 Standard Industry Compact Hydraulic Pressure Transducerjoin filtreNo ratings yet
- One Touch For Windows SDK Java Developer GuideDocument119 pagesOne Touch For Windows SDK Java Developer GuideIbrahim Pimentel AguilarNo ratings yet
- BEngDSP NotesDocument181 pagesBEngDSP Notesashrafdeen_08No ratings yet
- 6.stored Functions (Main Notes)Document5 pages6.stored Functions (Main Notes)Lakshman KumarNo ratings yet
- Open Collector InputsDocument3 pagesOpen Collector InputsrezakaihaniNo ratings yet
- Busser Job DescriptionDocument2 pagesBusser Job DescriptionWinda AdjuNo ratings yet
- Zip CrackerDocument12 pagesZip CrackerabhishekNo ratings yet
- Oil Gas Services TUV RheinlandDocument2 pagesOil Gas Services TUV RheinlandUppiliappan GopalanNo ratings yet
- ABB A16 40 00Document4 pagesABB A16 40 00aparna.vNo ratings yet
- System Software Unit 1Document14 pagesSystem Software Unit 1TAJCHISHTINo ratings yet