You might also like
- GooglepreviewDocument69 pagesGooglepreviewtarunchatNo ratings yet
- Harajuku: Rebels On The BridgeDocument31 pagesHarajuku: Rebels On The BridgeChristian Perry100% (41)
- HOW To Use Jmeter To Load Test T24Document27 pagesHOW To Use Jmeter To Load Test T24Hiếu KoolNo ratings yet
- More Med Surg Practice QuestionsDocument14 pagesMore Med Surg Practice QuestionsmisscoombsNo ratings yet
- Vijay Solvex PROJECT "Retention Strategy"Document110 pagesVijay Solvex PROJECT "Retention Strategy"Jayesh SinghNo ratings yet
- FrankensteinDocument24 pagesFrankensteinLisa WardNo ratings yet
- ATLAS CYLINDER LUBRICATOR MANUALDocument36 pagesATLAS CYLINDER LUBRICATOR MANUALKaleb Z king webNo ratings yet
- Pyrolysis ProjectDocument122 pagesPyrolysis ProjectSohel Bangi100% (1)
- Linley 5gDocument4 pagesLinley 5ghelbakouryNo ratings yet
- 05 Askeland ChapDocument10 pages05 Askeland ChapWeihanZhang100% (1)
- QOS of OpnetDocument8 pagesQOS of OpnetsszNo ratings yet
- Optimal Network Partitioning For Qos Protocols.: B.J. Greene and A. MarshallDocument5 pagesOptimal Network Partitioning For Qos Protocols.: B.J. Greene and A. Marshalleugene123No ratings yet
- Coordinated Network Scheduling Framework for End-to-End ServicesDocument11 pagesCoordinated Network Scheduling Framework for End-to-End ServiceseugeneNo ratings yet
- Interference-Aware Real-Time Flow Scheduling For Wireless Sensor NetworksDocument11 pagesInterference-Aware Real-Time Flow Scheduling For Wireless Sensor NetworksSalil BatraNo ratings yet
- Computer Communication 95Document24 pagesComputer Communication 95eugeneNo ratings yet
- Combined To Many Logics: Iii. ImplementationDocument4 pagesCombined To Many Logics: Iii. ImplementationNandkishore PatilNo ratings yet
- Distributed Multi-Hop Scheduling and Medium Access With Delay and Throughput ConstraintsDocument10 pagesDistributed Multi-Hop Scheduling and Medium Access With Delay and Throughput ConstraintsNabil MesbahiNo ratings yet
- Jecet: Journal of Electronics and Communication Engineering & Technology (JECET)Document6 pagesJecet: Journal of Electronics and Communication Engineering & Technology (JECET)IAEME PublicationNo ratings yet
- Longest Integrated Longest Queue First SchedulingDocument12 pagesLongest Integrated Longest Queue First SchedulingjameelahmadNo ratings yet
- Qos in Manets ThesisDocument5 pagesQos in Manets Thesisppxohvhkd100% (2)
- VP Distribution Algorithm Maximizes Network RevenueDocument15 pagesVP Distribution Algorithm Maximizes Network RevenueKumar SumeetNo ratings yet
- Smart Traffic Management in High-Speed Networks by Fuzzy Logic ControlDocument7 pagesSmart Traffic Management in High-Speed Networks by Fuzzy Logic ControlInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Destination, Computes The Delay and Sends A Backward: Iv Snapshots SourceDocument4 pagesDestination, Computes The Delay and Sends A Backward: Iv Snapshots SourceNandkishore PatilNo ratings yet
- Optimal Qos-Aware Network Reconfiguration in Software Defined Cloud Data CentersDocument23 pagesOptimal Qos-Aware Network Reconfiguration in Software Defined Cloud Data CentersSamia BlumNo ratings yet
- 802.11e QoS Management for Service DifferentiationDocument5 pages802.11e QoS Management for Service DifferentiationimranjablaNo ratings yet
- Computer Communications: Hua Wang, Lars DittmannDocument14 pagesComputer Communications: Hua Wang, Lars DittmannAmandeep SinghNo ratings yet
- Chapter 1Document13 pagesChapter 1Hemn KamalNo ratings yet
- (IJCST-V4I4P37) :G.Srilakshmi, Dr.K.KungumarajDocument12 pages(IJCST-V4I4P37) :G.Srilakshmi, Dr.K.KungumarajEighthSenseGroupNo ratings yet
- Leonid, Guerin, Vperis Kumar@ece - Iisc.ernet - inDocument33 pagesLeonid, Guerin, Vperis Kumar@ece - Iisc.ernet - inChindu KrishNo ratings yet
- A Cross-Layer-Based Routing With Qos-Aware Scheduling For Wireless Sensor NetworksDocument8 pagesA Cross-Layer-Based Routing With Qos-Aware Scheduling For Wireless Sensor NetworksPoojaCambsNo ratings yet
- Experiences Using Gateway-Enforced Rate-Limiting Techniques in Wireless Mesh NetworksDocument6 pagesExperiences Using Gateway-Enforced Rate-Limiting Techniques in Wireless Mesh NetworksSatish NaiduNo ratings yet
- Qos and ModelsDocument3 pagesQos and ModelsJoseph AttardNo ratings yet
- Tradeoffs in Designing Networks With End-To-End Statistical Qos GuaranteesDocument22 pagesTradeoffs in Designing Networks With End-To-End Statistical Qos GuaranteeseugeneNo ratings yet
- Resource Literature ReviewDocument5 pagesResource Literature ReviewpriyaNo ratings yet
- Optimizing Data Transmission Capacity On Satellite Links With Non-Zero Bit Error RatesDocument8 pagesOptimizing Data Transmission Capacity On Satellite Links With Non-Zero Bit Error Ratespcitest123No ratings yet
- Service Disciplines for Guaranteed Performance Packet NetworksDocument23 pagesService Disciplines for Guaranteed Performance Packet NetworksHà Ngọc HảiNo ratings yet
- Bandwidth Recycling in IEEE 802.16 Networks - 100Document9 pagesBandwidth Recycling in IEEE 802.16 Networks - 100raghueshNo ratings yet
- A Novel Adaptive Resource Allocation Scheme With QoS Support in Mobile WiMAX Release 2 Wireless NetworksDocument8 pagesA Novel Adaptive Resource Allocation Scheme With QoS Support in Mobile WiMAX Release 2 Wireless NetworksCyberJournals MultidisciplinaryNo ratings yet
- AbstractDocument3 pagesAbstractRajesh InsbNo ratings yet
- LAPLUS: An Efficient, Effective and Stable Switch Algorithm For Flow Control of The Available Bit Rate ATM ServiceDocument9 pagesLAPLUS: An Efficient, Effective and Stable Switch Algorithm For Flow Control of The Available Bit Rate ATM Servicemsoto20052576No ratings yet
- Fast-Response Dynamic RoutingDocument9 pagesFast-Response Dynamic RoutingChirag SachdevaNo ratings yet
- 2006 Jun 657-670Document14 pages2006 Jun 657-670Rasheed AhmedNo ratings yet
- Scheduling and Resource Allocation For Multiclass Services in LTE Uplink SystemsDocument6 pagesScheduling and Resource Allocation For Multiclass Services in LTE Uplink SystemsAssem MahmoudNo ratings yet
- Quality of Service MechanismsDocument3 pagesQuality of Service MechanismsscribdslaskNo ratings yet
- Real-Time Simulations of TCP/IP over Wireless Fading ChannelsDocument5 pagesReal-Time Simulations of TCP/IP over Wireless Fading ChannelsAshish SinghNo ratings yet
- OVSF Code Tree Management For UMTSDocument5 pagesOVSF Code Tree Management For UMTSEr Priyansh LaddhaNo ratings yet
- Bandwidth Recycling in IEEE 802.16 NetworksDocument7 pagesBandwidth Recycling in IEEE 802.16 Networkskathir1982No ratings yet
- Performance Investigation of An On-Line Auction System: Jane Hillston, Le Ila KloulDocument21 pagesPerformance Investigation of An On-Line Auction System: Jane Hillston, Le Ila KloulkgjhdkjhgkdNo ratings yet
- Fuzzy Congestion Control and Policing in ATM Networks: Ming-Chang HuangDocument20 pagesFuzzy Congestion Control and Policing in ATM Networks: Ming-Chang HuangNeha DadhichNo ratings yet
- Nomadic Service Assignment: Index Terms - Mobile Communication Systems, Online Computation, Distributed Net-WorksDocument35 pagesNomadic Service Assignment: Index Terms - Mobile Communication Systems, Online Computation, Distributed Net-WorksArthee PandiNo ratings yet
- Proactive Resource Provisioning For Voice Over IPDocument7 pagesProactive Resource Provisioning For Voice Over IPeugene123No ratings yet
- Artes: α (s, t) = st eDocument14 pagesArtes: α (s, t) = st eWilliam Ramos PaucarNo ratings yet
- BW BenchmarkDocument22 pagesBW BenchmarkCentaur ArcherNo ratings yet
- HiddenMarkov PredDocument9 pagesHiddenMarkov Predmrcord814800No ratings yet
- Combined To Many Logics: Iii. ImplementationDocument4 pagesCombined To Many Logics: Iii. ImplementationNandkishore PatilNo ratings yet
- Performance Issues in ATM NetworkDocument19 pagesPerformance Issues in ATM NetworkHarsh SihotraNo ratings yet
- Hierarchical Server Traffic Scheduling Ethernet SwitchesDocument2 pagesHierarchical Server Traffic Scheduling Ethernet Switchessdafas dfNo ratings yet
- Improving Fairness in Packetized Computer Data NetworksDocument29 pagesImproving Fairness in Packetized Computer Data NetworksOPTICALMIMOOFDMNo ratings yet
- Traffic Shaping Based On An Exponential Token Bucket For Quantitative Qos: Implementation and Experiments On Diffserv RoutersDocument17 pagesTraffic Shaping Based On An Exponential Token Bucket For Quantitative Qos: Implementation and Experiments On Diffserv RoutersAnonymous cRxoHJ32QvNo ratings yet
- An Efficient Approach To Support Qos and Bandwidth Efficiency inDocument9 pagesAn Efficient Approach To Support Qos and Bandwidth Efficiency inaoanh02No ratings yet
- Quality-of-Service in Packet Networks Basic Mechanisms and DirectionsDocument16 pagesQuality-of-Service in Packet Networks Basic Mechanisms and DirectionsoicfbdNo ratings yet
- IEEE/ACM TRANSACTIONS ON NETWORKING PAPER ON ALLOCATED BEST-EFFORT PACKET DELIVERYDocument12 pagesIEEE/ACM TRANSACTIONS ON NETWORKING PAPER ON ALLOCATED BEST-EFFORT PACKET DELIVERYKhalid SaidiNo ratings yet
- Use Only: Flowstat: Adaptive Flow-Rule Placement For Per-Flow Statistics in SDNDocument10 pagesUse Only: Flowstat: Adaptive Flow-Rule Placement For Per-Flow Statistics in SDNakttripathiNo ratings yet
- QOS Direct MonitoringDocument15 pagesQOS Direct Monitoringshafa18No ratings yet
- Improving Distributed System Performance by Unbalancing Load for Heavy-Tailed Task SizesDocument21 pagesImproving Distributed System Performance by Unbalancing Load for Heavy-Tailed Task SizesAbdulfetah HadiNo ratings yet
- Improving SCFQ To Support Bursty TrafficDocument11 pagesImproving SCFQ To Support Bursty TrafficJohn BergNo ratings yet
- Performance Comparison of Qos Routing Algorithms Applicable To Large-Scale SDN NetworksDocument6 pagesPerformance Comparison of Qos Routing Algorithms Applicable To Large-Scale SDN NetworksS M Shamim শামীমNo ratings yet
- Performance Analysis of Wireless Mesh Network Using Adaptive Informant Factor Based Optimized Channel AllocationDocument15 pagesPerformance Analysis of Wireless Mesh Network Using Adaptive Informant Factor Based Optimized Channel AllocationijcsesNo ratings yet
- Modeling and Dimensioning of Mobile Wireless Networks: From GSM to LTEFrom EverandModeling and Dimensioning of Mobile Wireless Networks: From GSM to LTENo ratings yet
- Walrand Parekh Slides PDFDocument99 pagesWalrand Parekh Slides PDFhelbakouryNo ratings yet
- Letter: Security and Eavesdropping in Terahertz Wireless LinksDocument8 pagesLetter: Security and Eavesdropping in Terahertz Wireless LinkshelbakouryNo ratings yet
- Walrand Parekh Slides PDFDocument99 pagesWalrand Parekh Slides PDFhelbakouryNo ratings yet
- A Case For End System MulticastDocument15 pagesA Case For End System MulticastmayweatherNo ratings yet
- Creating Your 5G Game Plan: E-GuideDocument23 pagesCreating Your 5G Game Plan: E-GuidehelbakouryNo ratings yet
- The Role and Task of The System Architect PDFDocument8 pagesThe Role and Task of The System Architect PDFhelbakouryNo ratings yet
- Ijet V3i5p23Document8 pagesIjet V3i5p23International Journal of Engineering and TechniquesNo ratings yet
- Link Budget LTE - UplinkDocument3 pagesLink Budget LTE - UplinkSaran KhalidNo ratings yet
- The Role and Task of The System ArchitectDocument8 pagesThe Role and Task of The System ArchitecthelbakouryNo ratings yet
- PostgreSQL 7.3.2 TutorialDocument40 pagesPostgreSQL 7.3.2 TutorialjunkeezNo ratings yet
- A Short Survey On Next Generation 5G Wireless NetworksDocument10 pagesA Short Survey On Next Generation 5G Wireless NetworkshelbakouryNo ratings yet
- Creating Your 5G Game Plan: E-GuideDocument23 pagesCreating Your 5G Game Plan: E-GuidehelbakouryNo ratings yet
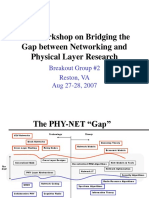
- NSF Workshop on Bridging the Gap between Networking and Physical Layer ResearchDocument8 pagesNSF Workshop on Bridging the Gap between Networking and Physical Layer ResearchhelbakouryNo ratings yet
- IoT Edge Opportunities CDocument27 pagesIoT Edge Opportunities ChelbakouryNo ratings yet
- Data-Driven Advice For Applying Machine Learning To Bioinformatics ProblemsDocument12 pagesData-Driven Advice For Applying Machine Learning To Bioinformatics ProblemshelbakouryNo ratings yet
- Latency-Aware Optimization of Service Chain Allocation With Joint VNF Instantiation and SDN Metro ControlDocument4 pagesLatency-Aware Optimization of Service Chain Allocation With Joint VNF Instantiation and SDN Metro ControlhelbakouryNo ratings yet
- Towards 5g Ran Virtualization Enabled by Intel and AstriDocument5 pagesTowards 5g Ran Virtualization Enabled by Intel and AstrihelbakouryNo ratings yet
- Key Safety Challenges For The IIoTDocument15 pagesKey Safety Challenges For The IIoThelbakouryNo ratings yet
- Networking DydtemsDocument47 pagesNetworking DydtemshelbakouryNo ratings yet
- Datacenter Traffic Control - Understanding Techniques and TradeoffsDocument35 pagesDatacenter Traffic Control - Understanding Techniques and TradeoffshelbakouryNo ratings yet
- Implementing The 'TCP Prague' Requirements For L4SDocument29 pagesImplementing The 'TCP Prague' Requirements For L4ShelbakouryNo ratings yet
- A Survey of Opportunistic OffloadingDocument39 pagesA Survey of Opportunistic OffloadinghelbakouryNo ratings yet
- Reliability and Resilience PDFDocument3 pagesReliability and Resilience PDFmayalasan1No ratings yet
- 6 Filtering and Streaming: 6.1 Bloom FiltersDocument6 pages6 Filtering and Streaming: 6.1 Bloom FiltershelbakouryNo ratings yet
- 080820.alt To Carrier Grade NatDocument5 pages080820.alt To Carrier Grade NathelbakouryNo ratings yet
- Good and Harm of Affective ComputingDocument14 pagesGood and Harm of Affective ComputinghelbakouryNo ratings yet
- Security Assessment For SDN - Based Mobile NetworksDocument16 pagesSecurity Assessment For SDN - Based Mobile NetworkshelbakouryNo ratings yet
- Xors in The Air: Practical Wireless Network CodingDocument12 pagesXors in The Air: Practical Wireless Network CodinggabipacurarrNo ratings yet
- Openflow Security AnalysisDocument6 pagesOpenflow Security AnalysishelbakouryNo ratings yet
- Encrypt and decrypt a file using AESDocument5 pagesEncrypt and decrypt a file using AESShaunak bagadeNo ratings yet
- Jensen-English I SyllabusDocument6 pagesJensen-English I Syllabusapi-284900455No ratings yet
- Film set safety rules for COVIDDocument12 pagesFilm set safety rules for COVIDTanveer HossainNo ratings yet
- RRLDocument4 pagesRRLTiltshifter ViNo ratings yet
- MarasiNews Issue 12Document47 pagesMarasiNews Issue 12Sunil Kumar P GNo ratings yet
- PPPoE Packet Format - HCNADocument6 pagesPPPoE Packet Format - HCNARobert Sanchez OchochoqueNo ratings yet
- Catalogue PDFDocument4 pagesCatalogue PDFShivam GuptaNo ratings yet
- Goldenberg and Reddy (2017)Document10 pagesGoldenberg and Reddy (2017)Mariana ToniniNo ratings yet
- Conditional Sentences in NT Greek Ruben VideiraDocument62 pagesConditional Sentences in NT Greek Ruben Videiraruviso100% (1)
- Polifur 1K Synthetic Top Coat MSDS Rev 2 ENDocument14 pagesPolifur 1K Synthetic Top Coat MSDS Rev 2 ENvictorzy06No ratings yet
- Split Plot Design GuideDocument25 pagesSplit Plot Design GuidefrawatNo ratings yet
- KENDRIYA VIDYALAYA Biology Investigatory ProjectDocument28 pagesKENDRIYA VIDYALAYA Biology Investigatory Projectvishali GNo ratings yet
- Diwali - An Overview of The Festival of LightsDocument3 pagesDiwali - An Overview of The Festival of LightsSumeetNo ratings yet
- Tiger Tales: From Colonial MalayaDocument16 pagesTiger Tales: From Colonial MalayamatarsNo ratings yet
- Deconstructing Product Design Exploring The Form, Function, Usability, Sustainability, and Commercial Success of 100 Amazing Products PDFDocument100 pagesDeconstructing Product Design Exploring The Form, Function, Usability, Sustainability, and Commercial Success of 100 Amazing Products PDFMontserrat CifuentesNo ratings yet
- Thick Seam Mining Methods and Problems Associated With It: Submitted By: SAURABH SINGHDocument13 pagesThick Seam Mining Methods and Problems Associated With It: Submitted By: SAURABH SINGHPrabhu PrasadNo ratings yet
- Ezequiel Reyes CV EngDocument1 pageEzequiel Reyes CV Engezequiel.rdNo ratings yet
- Sri Lanka, CBSLDocument24 pagesSri Lanka, CBSLVyasIRMANo ratings yet
- Comparison of AdjectivesDocument2 pagesComparison of AdjectivesmallxNo ratings yet
- Edtpa Lesson Plan 1Document3 pagesEdtpa Lesson Plan 1api-364684662No ratings yet
- X32 Digital Mixer: Quick Start GuideDocument28 pagesX32 Digital Mixer: Quick Start GuideJordán AstudilloNo ratings yet