You might also like
- Network Coding TutorialDocument154 pagesNetwork Coding TutorialPavlos ZirNo ratings yet
- An Engineering Document Management System PDFDocument19 pagesAn Engineering Document Management System PDFbrelightsNo ratings yet
- Deathwork Defending The CondemnedDocument338 pagesDeathwork Defending The CondemnedbrelightsNo ratings yet
- Complexity in CodingDocument115 pagesComplexity in CodingElie AtallahNo ratings yet
- Network Coding TutorialDocument154 pagesNetwork Coding TutorialPavlos ZirNo ratings yet
- MIT Lockpicking GuideDocument49 pagesMIT Lockpicking GuideNarrowPathPilgrim100% (10)
- Complexity in CodingDocument115 pagesComplexity in CodingElie AtallahNo ratings yet
- Literature Review Small Movement Exp Jts PDFDocument15 pagesLiterature Review Small Movement Exp Jts PDFRamesh P KoiralaNo ratings yet
- Dynamics of Modular Expansion Joints - The Martinus Nijhoff BridgeDocument11 pagesDynamics of Modular Expansion Joints - The Martinus Nijhoff BridgebrelightsNo ratings yet
- Chapter 19. Plate and Box GirdersDocument25 pagesChapter 19. Plate and Box GirdersbrelightsNo ratings yet
- Chapter 10. Bridge StructuresDocument108 pagesChapter 10. Bridge StructuresbrelightsNo ratings yet
- Chapter 10. Bridge StructuresDocument108 pagesChapter 10. Bridge StructuresbrelightsNo ratings yet
- General GuidelinesDocument150 pagesGeneral Guidelinesbrelights100% (1)
- Standard For Mechanical Expansion JointsDocument29 pagesStandard For Mechanical Expansion JointsSARVANANo ratings yet
- Chapter 10. Bridge StructuresDocument108 pagesChapter 10. Bridge StructuresbrelightsNo ratings yet
- Manual of Bridge Inspection - 2010Document397 pagesManual of Bridge Inspection - 2010brelights0% (1)
- Rubber Buffings For Bridge Approach Expansion JointsDocument25 pagesRubber Buffings For Bridge Approach Expansion JointsbrelightsNo ratings yet
- Expansion Joints and Bridge BearingsDocument54 pagesExpansion Joints and Bridge BearingsbrelightsNo ratings yet
- Inspection Guidance For Bridge Expansion JointsDocument65 pagesInspection Guidance For Bridge Expansion JointsbrelightsNo ratings yet
- Concrete Bridge Practice by V K RainaDocument788 pagesConcrete Bridge Practice by V K Rainammmghorab84% (19)
- 'Expansion Joint Renewal With 'Zero' Impact On Traffic - An Optimal Solution For Urban Bridges', IABSE Venice 2010Document8 pages'Expansion Joint Renewal With 'Zero' Impact On Traffic - An Optimal Solution For Urban Bridges', IABSE Venice 2010brelightsNo ratings yet
- Fatigue and Dynamic Load Measurements On Modular Expansion JointsDocument8 pagesFatigue and Dynamic Load Measurements On Modular Expansion Jointsbrelights100% (1)
- Design Rules For Bridge Bearings and Expansion JointsDocument183 pagesDesign Rules For Bridge Bearings and Expansion Jointsbrelights100% (2)
- Bridge Design Guidelines - Joints and BearingsDocument22 pagesBridge Design Guidelines - Joints and BearingsbrelightsNo ratings yet
- Bridge Deck Expansion JointsDocument13 pagesBridge Deck Expansion JointsbrelightsNo ratings yet
- AASHTO Bridge Design ManualDocument530 pagesAASHTO Bridge Design ManualDifa LiuNo ratings yet
- Common Pathologies in RC Bridge Structures - A Statistical AnalysisDocument8 pagesCommon Pathologies in RC Bridge Structures - A Statistical AnalysisbrelightsNo ratings yet
- Master BuilderDocument9 pagesMaster BuilderYati AggarwalNo ratings yet
- Bridge JointsDocument4 pagesBridge JointsbrelightsNo ratings yet
- BBEJDocument222 pagesBBEJEnisa Šehić-JahićNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- How Differential WorksDocument23 pagesHow Differential WorksVishesh JainNo ratings yet
- M00-2973 .PartsManual PDFDocument238 pagesM00-2973 .PartsManual PDFRicardo Ramirez EstrelloNo ratings yet
- Lonking 833Document1 pageLonking 833Hoàng Anh PhạmNo ratings yet
- Cardan Shaft Katalog PDFDocument32 pagesCardan Shaft Katalog PDFkamalNo ratings yet
- 615212G00295 enDocument216 pages615212G00295 enHassan ED DbaliNo ratings yet
- 7400 Mammut Self-Propelled Forage HarvesterDocument182 pages7400 Mammut Self-Propelled Forage Harvesteralex uaNo ratings yet
- 5130 6130 7130 T2/T4 Combine Common Cab: Parts CatalogDocument1,460 pages5130 6130 7130 T2/T4 Combine Common Cab: Parts CatalogLucas100% (1)
- List AllocatedDocument44 pagesList AllocatedTuratea ErwinNo ratings yet
- TelehanderDocument356 pagesTelehandercristianNo ratings yet
- BELL 40D Repair Manual 872092 B35 B40D RMDocument394 pagesBELL 40D Repair Manual 872092 B35 B40D RMMasterrNo ratings yet
- Despiece-Mototaxi Re4sDocument112 pagesDespiece-Mototaxi Re4sCristian HiguitaNo ratings yet
- BCS 948 Parts CatalogDocument13 pagesBCS 948 Parts CatalogPaweł SorokaNo ratings yet
- Design of ShaftDocument2 pagesDesign of Shaftgourab190% (1)
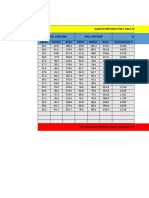
- Wheel Load (KN) Axle Load (KN) Equivalency Factor Front Middle Rear Front Middle Rear FRONT (kN/65) 4Document10 pagesWheel Load (KN) Axle Load (KN) Equivalency Factor Front Middle Rear Front Middle Rear FRONT (kN/65) 4jhonnyNo ratings yet
- Suspension - Front Article TextDocument5 pagesSuspension - Front Article TextGatis IvbulisNo ratings yet
- Liebherr LTM 1040-2.1 Mobile Crane - 40t - Technical DataDocument18 pagesLiebherr LTM 1040-2.1 Mobile Crane - 40t - Technical DataCallumWoodward100% (1)
- Machine Design Complete PDFDocument215 pagesMachine Design Complete PDFJobert Arsenal CaroNo ratings yet
- Alto 800 DetailsDocument2 pagesAlto 800 DetailsRahul RaoNo ratings yet
- Traffic Counts Manual PDFDocument23 pagesTraffic Counts Manual PDFA. S. M. Elias ShahNo ratings yet
- Brosur Loader CaterpillarDocument4 pagesBrosur Loader CaterpillarWildan KurniaNo ratings yet
- Tire Replacement ManualDocument55 pagesTire Replacement Manualpierrecmoeller1159No ratings yet
- Transfert Case - Getrag 760Document47 pagesTransfert Case - Getrag 760Nathan SheatherNo ratings yet
- 155零件手册 EnDocument389 pages155零件手册 EnBach Nguyen XuanNo ratings yet
- Service Manual Book NISSAN GRAND LIVINADocument22 pagesService Manual Book NISSAN GRAND LIVINAogyrisky92% (12)
- ARB Newsletter Jul07 Export PDFDocument26 pagesARB Newsletter Jul07 Export PDFmoisesNo ratings yet
- Genuine Service Parts For Commercial VehiclesDocument44 pagesGenuine Service Parts For Commercial Vehiclesjuan apazaNo ratings yet
- Spare Parts Catalog: MS-E 3050 Material Number: 4472.097.005 Current Date: 17.02.2022Document31 pagesSpare Parts Catalog: MS-E 3050 Material Number: 4472.097.005 Current Date: 17.02.2022TomiNo ratings yet
- GR 600EX SpecsheetDocument16 pagesGR 600EX SpecsheetTeguh Nugraha NatawijayaNo ratings yet
- Axles Trailer TZ-5 y 3 y TE 225Document44 pagesAxles Trailer TZ-5 y 3 y TE 225Al FbaNo ratings yet
- Farmtrac Tractor Front Spindle AssemblyDocument28 pagesFarmtrac Tractor Front Spindle AssemblyRaju KumarNo ratings yet