You might also like
- Water Treatments: Steam Water Cycle TreatmentDocument2 pagesWater Treatments: Steam Water Cycle TreatmentkjfenNo ratings yet
- Temperature Monitoring: FaizanDocument5 pagesTemperature Monitoring: FaizankjfenNo ratings yet
- Sub 131Document10 pagesSub 131kjfenNo ratings yet
- REG670Document88 pagesREG670Rafael Hoffmann PaludoNo ratings yet
- 7 Ways Signal Noise Can Impact Your Electrical EquipmentDocument5 pages7 Ways Signal Noise Can Impact Your Electrical EquipmentkjfenNo ratings yet
- Selo 1Document26 pagesSelo 1kjfenNo ratings yet
- 7SA522 CatalogueDocument53 pages7SA522 CataloguePhilip D'cruzNo ratings yet
- Degree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarksDocument10 pagesDegree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarkskjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
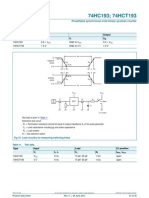
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- 74HC193 74HCT193: 14. AbbreviationsDocument2 pages74HC193 74HCT193: 14. AbbreviationskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pages74HC193 74HCT193: 10. Dynamic CharacteristicskjfenNo ratings yet
- 74HC193 74HCT193: 17. Contact InformationDocument2 pages74HC193 74HCT193: 17. Contact InformationkjfenNo ratings yet
- 74HC193 74HCT193: 13. Package OutlineDocument2 pages74HC193 74HCT193: 13. Package OutlinekjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC HCT193Document2 pages74HC HCT193kjfenNo ratings yet
- 74HC193 74HCT193: 9. Static CharacteristicsDocument2 pages74HC193 74HCT193: 9. Static CharacteristicskjfenNo ratings yet
- 74HC193 74HCT193: 5. Pinning InformationDocument2 pages74HC193 74HCT193: 5. Pinning InformationkjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pages74HC193 74HCT193: 10. Dynamic CharacteristicskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Control of Electrical Machines PDFDocument128 pagesControl of Electrical Machines PDFDeva DossNo ratings yet
- WYO Ceramic AC Capacitors Class X1, 440V / Class Y2, 250V: Vishay DraloricDocument2 pagesWYO Ceramic AC Capacitors Class X1, 440V / Class Y2, 250V: Vishay DraloricАндрей ПоляковNo ratings yet
- Quotation Voltage StabilizerDocument1 pageQuotation Voltage StabilizerAnshuman GogoiNo ratings yet
- Unidades Paquete 25 Ton-FOUNDATION - RTU-1 25 Tons - Consolidated Customer PackageDocument9 pagesUnidades Paquete 25 Ton-FOUNDATION - RTU-1 25 Tons - Consolidated Customer Packageimecc ingenieriaNo ratings yet
- CRT TV Repair Course by Humphrey-PreviewDocument33 pagesCRT TV Repair Course by Humphrey-PreviewRichard Bermal Magalona76% (25)
- FILE 20210720 230205 Ôn-Tập-TACNDocument9 pagesFILE 20210720 230205 Ôn-Tập-TACNVăn KhánhNo ratings yet
- This Is The Bacis of Inverter Circuit DiagramDocument2 pagesThis Is The Bacis of Inverter Circuit DiagramJaiparkash SaveliaNo ratings yet
- Simple Musical LEDs Circuit DiagramDocument22 pagesSimple Musical LEDs Circuit Diagrambluesky_1976No ratings yet
- High and Medium Voltage Circuit Breaker TestingDocument10 pagesHigh and Medium Voltage Circuit Breaker TestingFaridahmad AziziNo ratings yet
- Effect of Grading Ring On Voltage Distribution of ArrestorsDocument7 pagesEffect of Grading Ring On Voltage Distribution of ArrestorsTravis WoodNo ratings yet
- Programming Guide Altivar 71 Inverter ManualDocument263 pagesProgramming Guide Altivar 71 Inverter ManualsherbetsnifferNo ratings yet
- EKV Based ModelingDocument6 pagesEKV Based ModelingMagnanil GoswamiNo ratings yet
- Phys 212Document39 pagesPhys 212Tilahun TesfayeNo ratings yet
- Rish Insu 10Document3 pagesRish Insu 10Sunil SinghNo ratings yet
- Battery Failure PredictionDocument10 pagesBattery Failure PredictionChris Baddeley100% (1)
- Lab E1 RLC Circuit 1Document11 pagesLab E1 RLC Circuit 1Ching Wai Yong100% (1)
- How To Make A Digital SynthesizeDocument32 pagesHow To Make A Digital Synthesizewaketek100% (1)
- Ads 7824Document21 pagesAds 7824Andres Alberto Meza BrocheroNo ratings yet
- 12TH em Unit 1 To 11 Notes PDFDocument135 pages12TH em Unit 1 To 11 Notes PDFUma Maheswari100% (1)
- 2700-2790 ManualDocument14 pages2700-2790 ManualVaghela UttamNo ratings yet
- Fundamentals of Modern Electrical Substations - Part 2 - R2Document22 pagesFundamentals of Modern Electrical Substations - Part 2 - R2Harish De SilvaNo ratings yet
- Itelcond PDFDocument42 pagesItelcond PDFThiago BertiNo ratings yet
- 10 10 Physics Physics: Short Question Answers. Short Question Answers.Document44 pages10 10 Physics Physics: Short Question Answers. Short Question Answers.حمزہ ایوبNo ratings yet
- Chapter 2. Basic Sensors and Principles: 2.1 Displacement MeasurementsDocument26 pagesChapter 2. Basic Sensors and Principles: 2.1 Displacement MeasurementsIlavarasan TamizhNo ratings yet
- Shanthi PavanDocument12 pagesShanthi PavanAasif HameedNo ratings yet
- ACB MitsubishiDocument64 pagesACB MitsubishiAlHadiPutroNo ratings yet
- Section4&5-Doble Testing Basic Theory Part1&2Document18 pagesSection4&5-Doble Testing Basic Theory Part1&2juanete29100% (1)
- Lecture 7 - Biopotential ElectrodesDocument66 pagesLecture 7 - Biopotential ElectrodesKOFI BROWNNo ratings yet
- Impulse Commutated Chopper: Presented By: Parishrut (UE20410) M.E. (Power System)Document7 pagesImpulse Commutated Chopper: Presented By: Parishrut (UE20410) M.E. (Power System)parishrut charakNo ratings yet
- EE-331 Lab ReportDocument5 pagesEE-331 Lab Reportlaksh rathiNo ratings yet