You might also like
- Fluencia LentaDocument85 pagesFluencia LentaJuan Diego Palacio VelasquezNo ratings yet
- Diagramas Ternarios y MulticomponentesDocument18 pagesDiagramas Ternarios y MulticomponentesBart FrienderNo ratings yet
- Clase de Fractura y Mecanica de FracturaDocument104 pagesClase de Fractura y Mecanica de FracturaABELARDO LEYVA ALTAMIRANONo ratings yet
- Aceros de Alta Aleación Resistentes Al Creep y Resistentes Al Calor PDFDocument92 pagesAceros de Alta Aleación Resistentes Al Creep y Resistentes Al Calor PDFElmar CuellarNo ratings yet
- Vector de BurgersDocument2 pagesVector de BurgerscarlosNo ratings yet
- Fractura Por Fatiga (Corrosión)Document12 pagesFractura Por Fatiga (Corrosión)Nathalie CastilloNo ratings yet
- Post Lab Práctica No 2 (Ecuación de Antoine y Clausius)Document11 pagesPost Lab Práctica No 2 (Ecuación de Antoine y Clausius)Olguita PerezNo ratings yet
- Calibrador VernierDocument8 pagesCalibrador VernierInversiones GiovannaNo ratings yet
- Inventor Simulacion Dinamica y Analisis Por Elementos Finitos 2013Document2 pagesInventor Simulacion Dinamica y Analisis Por Elementos Finitos 2013Juan AlmeidaNo ratings yet
- Guia de Torsión #2Document9 pagesGuia de Torsión #2Anonymous yEL4YvJCNo ratings yet
- La Historia de La Unión de Metales Se Remonta A Varios MileniosDocument9 pagesLa Historia de La Unión de Metales Se Remonta A Varios MileniosscribdreiNo ratings yet
- Ejercicios Propuestos de EnsamblajeDocument2 pagesEjercicios Propuestos de EnsamblajefrankoNo ratings yet
- Ensayos DestructivosDocument20 pagesEnsayos DestructivosJosue PootNo ratings yet
- 9 Causas de Fallas en CalderasDocument13 pages9 Causas de Fallas en Calderasjose echeverry100% (1)
- Formacion de La VirutaDocument31 pagesFormacion de La VirutaTzuika Rios Aranda100% (3)
- Glosario - Ciencia de Los MaterialesDocument39 pagesGlosario - Ciencia de Los MaterialesManolo Par0% (1)
- Ingenieria de Materiales MetalicosDocument35 pagesIngenieria de Materiales MetalicosAaLezz Lóp EzzNo ratings yet
- Laboratorio Ensayo A Tracción (Acero y Polímero)Document13 pagesLaboratorio Ensayo A Tracción (Acero y Polímero)Joseph Silva OrdonezNo ratings yet
- Direcciones y Planos CristalográficosDocument11 pagesDirecciones y Planos CristalográficosMelissa ParedesNo ratings yet
- Fatiga de MaterialesDocument8 pagesFatiga de MaterialesMiguelNo ratings yet
- Jalgongo - Clase 9. Defectos CristalinosDocument42 pagesJalgongo - Clase 9. Defectos Cristalinosjose daniel sarmiento blancoNo ratings yet
- Laboratorio de TorsionDocument18 pagesLaboratorio de TorsionJuan Garay MonagoNo ratings yet
- Ajustes y ToleranciasDocument39 pagesAjustes y ToleranciasJoséNo ratings yet
- Ensayo de Deformación de La VigaDocument8 pagesEnsayo de Deformación de La VigaCristian Najar OcharanNo ratings yet
- TEMA 01 Resistencia A La Fatiga - IntroduccionDocument13 pagesTEMA 01 Resistencia A La Fatiga - Introduccionjose mamaniNo ratings yet
- Esfuerzo de Diseño y DeformacionDocument31 pagesEsfuerzo de Diseño y Deformacionorton26No ratings yet
- FRACTOGRAFIADocument12 pagesFRACTOGRAFIAMaria Laura GonzalezNo ratings yet
- Apuntes Soldabilidad Materiales FérreosDocument58 pagesApuntes Soldabilidad Materiales FérreosSergio López OrtegaNo ratings yet
- Guia para Estudiar Ensayos No DestructivosDocument12 pagesGuia para Estudiar Ensayos No DestructivosInacio Vazquez PachecoNo ratings yet
- Moldeo de Piezas No SimetricasDocument5 pagesMoldeo de Piezas No SimetricasRaul Mendoza IzarraNo ratings yet
- NanomaterialesDocument10 pagesNanomaterialesHugo Mauricio Mera YarpazNo ratings yet
- Ensayo de Dureza Brinell Rockwell Vickers ShoreDocument99 pagesEnsayo de Dureza Brinell Rockwell Vickers ShoreXiomaraNo ratings yet
- Temple Diagrama TTT 1Document17 pagesTemple Diagrama TTT 1TR MecánicaNo ratings yet
- Fresado Rueda DentadaDocument4 pagesFresado Rueda DentadaWilliam HinojosaNo ratings yet
- Temple, Normalizado, Recocidos Industriales PDFDocument27 pagesTemple, Normalizado, Recocidos Industriales PDFWillly LimasNo ratings yet
- Guía Taller 07 TF-2018-1Document4 pagesGuía Taller 07 TF-2018-1Gian FranNo ratings yet
- Diseño de Ruedas DentadasDocument4 pagesDiseño de Ruedas DentadasManuel MedinaNo ratings yet
- Atlas de Fractografía ASMDocument2 pagesAtlas de Fractografía ASMJorge Humberto Flores AvilaNo ratings yet
- Act. 4 Etica Del Deber. Caso Rayo ElectricoDocument2 pagesAct. 4 Etica Del Deber. Caso Rayo ElectricoCarolina RamirezNo ratings yet
- Ejercicios Resueltos Diagrama de Fases IES ValdehierroDocument21 pagesEjercicios Resueltos Diagrama de Fases IES ValdehierroAnaNo ratings yet
- Concentración de EsfuerzosDocument22 pagesConcentración de EsfuerzosSharon Milen Carrion CuadrosNo ratings yet
- Practica de ForjadoDocument14 pagesPractica de ForjadoMiguel ArguzNo ratings yet
- GUÍA No 7 Apoyo FlexiónDocument7 pagesGUÍA No 7 Apoyo Flexiónluis francisco deaza gomezNo ratings yet
- Que Es La FundicionDocument11 pagesQue Es La FundicionCarlos FerrufinoNo ratings yet
- Maquinado Quimico G12Document9 pagesMaquinado Quimico G12Cold SunsetNo ratings yet
- El Método de Los Elementos DiscretosDocument5 pagesEl Método de Los Elementos DiscretosOmar MBn100% (1)
- Trabajo de Procesos de FabricacionDocument35 pagesTrabajo de Procesos de Fabricaciondilena406No ratings yet
- Temple Revenido PDFDocument8 pagesTemple Revenido PDFIsaac Jonathan Vargas AvilesNo ratings yet
- Tipos de MaterialesDocument8 pagesTipos de MaterialesJesus SantiagoNo ratings yet
- Ejercicio Torneado2Document9 pagesEjercicio Torneado2Miguel LincangoNo ratings yet
- Tema 7. Extrusión y Trefilado de MetalesDocument86 pagesTema 7. Extrusión y Trefilado de MetalesAndrea Agreda SejasNo ratings yet
- Presentación Sobre La TribologíaDocument9 pagesPresentación Sobre La TribologíaBrayanSCNo ratings yet
- Fatiga de Los Elementos de MaquinaDocument21 pagesFatiga de Los Elementos de MaquinaThalia NabilNo ratings yet
- Herramientas de Corte (MANUFACTURA)Document63 pagesHerramientas de Corte (MANUFACTURA)gdssdgdsgNo ratings yet
- Corte y PunzonadoDocument3 pagesCorte y PunzonadoJulián VSNo ratings yet
- Fatiga TérmicaDocument29 pagesFatiga TérmicaJAIME BRIAN ROSARIO COSTILLANo ratings yet
- Formacion de VirutaDocument3 pagesFormacion de Virutaluis revolloNo ratings yet
- Ensayo de TraccionDocument4 pagesEnsayo de TraccionLuisHomeroZhañayNo ratings yet
- Desgaste y FallaDocument212 pagesDesgaste y FallaKlinsmann Diego100% (1)
- Mecánica de Medios ContinuosDocument4 pagesMecánica de Medios ContinuosarqcpnNo ratings yet
- Curva de La Bañera 1Document9 pagesCurva de La Bañera 1festradavNo ratings yet
- Analisis de Falla Con 5w y HDocument11 pagesAnalisis de Falla Con 5w y HfestradavNo ratings yet
- Aligneo Pocket Guide Ali-9.112!02!08 3.03 eDocument2 pagesAligneo Pocket Guide Ali-9.112!02!08 3.03 efestradav100% (1)
- Tabla Conversion CompletaDocument12 pagesTabla Conversion CompletaPeter Harold El Tigre86% (64)
- Mantenimiento PredictivoDocument136 pagesMantenimiento PredictivoDaniel Guerrero Fortuna100% (1)
- Selección de MaterialesDocument3 pagesSelección de MaterialesfestradavNo ratings yet
- Modos de Falla Mecanica1Document8 pagesModos de Falla Mecanica1festradavNo ratings yet
- Mitutoyo MicrometrosDocument47 pagesMitutoyo MicrometrosfestradavNo ratings yet
- Defectos Cristalinos en SólidosDocument11 pagesDefectos Cristalinos en SólidosfestradavNo ratings yet
- RodatipsDocument20 pagesRodatipsfestradav100% (1)
- 2.-Ing. Jesús Esquivel.-Estrategias de Mantenimiento MediantDocument19 pages2.-Ing. Jesús Esquivel.-Estrategias de Mantenimiento MediantfestradavNo ratings yet
- Mantenimiento Centrado en Confiabilidad (RCM)Document34 pagesMantenimiento Centrado en Confiabilidad (RCM)festradav100% (1)
- Por: Natalia Urrego OspinaDocument21 pagesPor: Natalia Urrego OspinafestradavNo ratings yet
- Guía NOM-020-STPS-2011Document18 pagesGuía NOM-020-STPS-2011Mabel Pallás50% (2)
- Tabla de Criterios para Desbalance y Desalineación Por VibraciónDocument3 pagesTabla de Criterios para Desbalance y Desalineación Por VibraciónfestradavNo ratings yet
- 5.-Ing. Juan Carlos Duarte Holguín - Gestión de Activos AMS GDocument33 pages5.-Ing. Juan Carlos Duarte Holguín - Gestión de Activos AMS GfestradavNo ratings yet
- MX C em 00111Document9 pagesMX C em 00111festradavNo ratings yet
- Niveles de Vibración CríticosDocument1 pageNiveles de Vibración CríticosfestradavNo ratings yet
- Manual de Usuario Cámara TermográficaDocument134 pagesManual de Usuario Cámara Termográficafestradav100% (1)
- Alineación de Faros DelanterosDocument3 pagesAlineación de Faros DelanterosfestradavNo ratings yet
- Monografia Del Silencio Administrativo.Document52 pagesMonografia Del Silencio Administrativo.Milagros Joseph Vargas83% (6)
- SPA de Matemática y LógicaDocument15 pagesSPA de Matemática y LógicajuanperzNo ratings yet
- COMUNICACIÓN 2021 Curso UNCDocument25 pagesCOMUNICACIÓN 2021 Curso UNCailaacc 2021No ratings yet
- Hidrograma de Co ClarkDocument32 pagesHidrograma de Co ClarkBrenda Narvaez TaypeNo ratings yet
- L Ferreyra Vidales2Document98 pagesL Ferreyra Vidales2MickySotoNo ratings yet
- CURRICULUM VITAE Jhonny Rivas Febrero - 2022Document10 pagesCURRICULUM VITAE Jhonny Rivas Febrero - 2022Fernando PeredoNo ratings yet
- Tesis PDFDocument119 pagesTesis PDFMilagros TasaycoNo ratings yet
- Grado 10Document5 pagesGrado 10Andrea MontoyaNo ratings yet
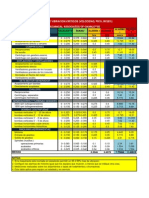
- Consulta de Baterias Segun Sus MarcasDocument17 pagesConsulta de Baterias Segun Sus MarcasStephenakd13100% (1)
- U1 - Conceptos y Elementos de Los Negocios InternacionalesDocument78 pagesU1 - Conceptos y Elementos de Los Negocios InternacionalesRosa Mary Tomas QuispeNo ratings yet
- Breve Historia de WindowsDocument7 pagesBreve Historia de WindowsMiguelCamachoT-TypeNo ratings yet
- Como PensamosDocument2 pagesComo PensamossharonvazquezNo ratings yet
- 1463391625métaforasdelamultitudiiicongresointernacionalestéticaypolítica 6291Document340 pages1463391625métaforasdelamultitudiiicongresointernacionalestéticaypolítica 6291IsabelIbarraNo ratings yet
- HIDROGENODocument24 pagesHIDROGENOtonyNo ratings yet
- Ejemplos Modelos de InventarioDocument7 pagesEjemplos Modelos de InventarioJonathan MartinezNo ratings yet
- Via Lucis 2009Document3 pagesVia Lucis 2009Mónica DominéNo ratings yet
- 2000 Eco Umberto Cómo Se Hace Una TesisDocument51 pages2000 Eco Umberto Cómo Se Hace Una TesisXimena Zapata100% (1)
- Mapa Estrategias GerencialesDocument2 pagesMapa Estrategias GerencialesAngelica Fierro SuanchaNo ratings yet
- 5-Regata Juegos DeportesDocument118 pages5-Regata Juegos DeportesCristinaNo ratings yet
- EstructuralDocument7 pagesEstructuralJose Luis Huancollo GoyzuetaNo ratings yet
- 1 Uso Del Internet en El Aprendizaje AcademicoDocument17 pages1 Uso Del Internet en El Aprendizaje AcademicoCarola Aguilera ApinayeNo ratings yet
- Monografia NeuromarketingDocument25 pagesMonografia NeuromarketingEmely Bustamante RojasNo ratings yet
- Buenas Noches DR y Compañeros Mi Aporte Al ForoDocument2 pagesBuenas Noches DR y Compañeros Mi Aporte Al ForoYanet Requejo Villegs100% (2)
- Maestria Fajardo CubaDocument2 pagesMaestria Fajardo CubaHomero CalixtoNo ratings yet
- Informe de Fuentes GA1 220501092 AA1 EV01Document4 pagesInforme de Fuentes GA1 220501092 AA1 EV01jalirbasanNo ratings yet
- Tarea 1 Geometria Plana y Del Espacio SeDocument3 pagesTarea 1 Geometria Plana y Del Espacio Semaria andreNo ratings yet
- Aa-27 Cuadro de Equipos 2 Torre A y BDocument1 pageAa-27 Cuadro de Equipos 2 Torre A y BGabriel Yañez JimenezNo ratings yet
- Ruth Flores MEI401 Entregable1Document10 pagesRuth Flores MEI401 Entregable1Ruth Sarai Flores GalvezNo ratings yet
- Diapositiva 06Document18 pagesDiapositiva 06jojosave22No ratings yet
- Presentación de Proyecto de Colores CálidosDocument8 pagesPresentación de Proyecto de Colores CálidosPatty Herrera alvarezNo ratings yet