You might also like
- Probability For DummiesDocument386 pagesProbability For Dummiessiguidiplomado100% (1)
- DSP Question Bank With SolutionsDocument52 pagesDSP Question Bank With SolutionsRakesh Kumar DNo ratings yet
- Secondary Planar Structural Elements in RocksDocument21 pagesSecondary Planar Structural Elements in Rocksbrynie watson ssekajjigo100% (1)
- 12 - Chapter 5 PDFDocument67 pages12 - Chapter 5 PDFPranav. ThubeNo ratings yet
- A New Method For Gravity Separation Vibrating TablDocument12 pagesA New Method For Gravity Separation Vibrating TablNicolle ZarateNo ratings yet
- Seismic WavesDocument49 pagesSeismic WavespsycobotNo ratings yet
- Geophysical Methods For Groundwater Resources Assessment deDocument11 pagesGeophysical Methods For Groundwater Resources Assessment dedurbakulaNo ratings yet
- Mar1989 Statics CorrectionsDocument14 pagesMar1989 Statics Correctionspankaj sharmaNo ratings yet
- Full Slope StabilityDocument49 pagesFull Slope StabilityKiptushNo ratings yet
- Lecture 1 PGE 316Document36 pagesLecture 1 PGE 316suhashNo ratings yet
- Chapter 23Document25 pagesChapter 23Jayaraj LathaNo ratings yet
- Elementary SeismologyDocument77 pagesElementary SeismologyvinitsloveNo ratings yet
- WTS 12 ElectrodynamicsDocument28 pagesWTS 12 ElectrodynamicsTondani100% (1)
- GY305 Lecture4 SeismologyDocument26 pagesGY305 Lecture4 Seismologytarek mahmoudNo ratings yet
- Solve Process Problems Quickly with Simulation TrainingDocument6 pagesSolve Process Problems Quickly with Simulation TrainingAnonymous qPt2MHzXTNo ratings yet
- Fundamental of Seismic Genap 2013-2014 TGDocument66 pagesFundamental of Seismic Genap 2013-2014 TGFandy MuhammadNo ratings yet
- Open Channel Flow Engineering GuideDocument66 pagesOpen Channel Flow Engineering GuideSandeep VaishnavNo ratings yet
- T1. Fundamentals of SeimologyDocument54 pagesT1. Fundamentals of SeimologyAbraham KefelegnNo ratings yet
- Paper - How To Compute Planetary Positions - Paul Schlyter - 2009Document19 pagesPaper - How To Compute Planetary Positions - Paul Schlyter - 2009Singgih Satrio Wibowo0% (1)
- Differencial Relation of Fluid FlowDocument48 pagesDifferencial Relation of Fluid FlowGashaw MinayeNo ratings yet
- Buckingham Pi TheoremDocument35 pagesBuckingham Pi TheoremDhanyaUnniNo ratings yet
- Geophysics GravityDocument36 pagesGeophysics Gravityazfarazwanis100% (1)
- Module 5Document22 pagesModule 5Rad PcioNo ratings yet
- 1 - Chapter 1Document36 pages1 - Chapter 1Fariha RasulNo ratings yet
- Semana1 LecturasDocument228 pagesSemana1 LecturasPepi Gomez100% (1)
- Plant Cost EstimationDocument49 pagesPlant Cost EstimationAlpianto100% (1)
- Book - IMO Model Course 7.04 - IMO - 2012Document228 pagesBook - IMO Model Course 7.04 - IMO - 2012Singgih Satrio Wibowo100% (4)
- Lecture 3Document15 pagesLecture 3ansgcekNo ratings yet
- Cubical DilationDocument5 pagesCubical DilationChintu Kishen KMNo ratings yet
- Resúmen 2Document29 pagesResúmen 2moranrubyNo ratings yet
- TEM1D - ZongeDocument18 pagesTEM1D - ZongeYoqie Ali Taufan100% (1)
- Geoelectrical Methods for Subsurface ExplorationDocument14 pagesGeoelectrical Methods for Subsurface ExplorationJasonNo ratings yet
- Matrix Fundamentals for Engineering StudentsDocument23 pagesMatrix Fundamentals for Engineering StudentspsnspkNo ratings yet
- SS EC2204 QUESTION BANKDocument16 pagesSS EC2204 QUESTION BANKSridhar RamanNo ratings yet
- Eigen Values, Eigen Vectors - Afzaal - 1Document81 pagesEigen Values, Eigen Vectors - Afzaal - 1syedabdullah786No ratings yet
- Seismic RefractionDocument74 pagesSeismic RefractionAdrian Liviu BugeaNo ratings yet
- Eigenvalues and EigenvectorsDocument31 pagesEigenvalues and Eigenvectorsanon_351812634No ratings yet
- Importance of Engineering Geology in Civil ProjectsDocument7 pagesImportance of Engineering Geology in Civil ProjectsNishant MeenaNo ratings yet
- Understanding Normal MoveoutDocument7 pagesUnderstanding Normal MoveoutabuobidaNo ratings yet
- Electrical Resistivity Methods 13 PDFDocument108 pagesElectrical Resistivity Methods 13 PDFNamwangala Rashid NatinduNo ratings yet
- Stress TensorDocument25 pagesStress TensorJsvijay KumarNo ratings yet
- Resistivity Methods ExplainedDocument10 pagesResistivity Methods ExplainedRuby PermataNo ratings yet
- Vertical Electrical SoundingDocument3 pagesVertical Electrical Soundingمزرعتنا السعيدةNo ratings yet
- What Is Seismic Interpretation? Alistair BrownDocument4 pagesWhat Is Seismic Interpretation? Alistair BrownElisa Maria Araujo GonzalezNo ratings yet
- Grav Lab RevDocument12 pagesGrav Lab RevShadi GarmaNo ratings yet
- C1.Vector AnalysisDocument27 pagesC1.Vector AnalysisRudy ObrienNo ratings yet
- Gupta Vol 1Document611 pagesGupta Vol 1aebsdNo ratings yet
- Introduction to Geodesy: Understanding the Size and Shape of the EarthDocument46 pagesIntroduction to Geodesy: Understanding the Size and Shape of the EarthPrasanna NaikNo ratings yet
- Estimating Moveout ParametersDocument4 pagesEstimating Moveout Parametersmahtab rashidifardNo ratings yet
- Engineering ElectromagneticDocument2 pagesEngineering ElectromagneticAnandiacrNo ratings yet
- Assignment 1Document1 pageAssignment 1Partha SurveNo ratings yet
- Fluid Mechanics Basics for ECW 211Document53 pagesFluid Mechanics Basics for ECW 211dixn__No ratings yet
- Castle - A Theory of Normal MoveoutDocument17 pagesCastle - A Theory of Normal MoveoutNeil BariiNo ratings yet
- Gravity AnomaliesDocument2 pagesGravity AnomaliesYadi Kurniadi100% (1)
- Tomography HumphreysDocument21 pagesTomography HumphreysMohd RezalNo ratings yet
- Lankston Refraction TR102Document55 pagesLankston Refraction TR102Harold G. Velasquez SanchezNo ratings yet
- Lab 02 - Seismic Data QCDocument6 pagesLab 02 - Seismic Data QCapi-323770220No ratings yet
- Mise A La Masse MethodDocument1 pageMise A La Masse MethodRiyadul IslamNo ratings yet
- Notes of LessonDocument52 pagesNotes of LessonRichards Ðånte WisdomNo ratings yet
- Pre Stack Migration Aperture - An Overview: Dr. J.V.S.S Narayana Murty, T. ShankarDocument6 pagesPre Stack Migration Aperture - An Overview: Dr. J.V.S.S Narayana Murty, T. ShankarJVSSNMurty100% (1)
- Environmental and Exploration Geophysics IDocument76 pagesEnvironmental and Exploration Geophysics IGhulam Mohyuddin SohailNo ratings yet
- 2 Wave EquationDocument34 pages2 Wave EquationSandeep Chaudhary100% (1)
- Fluid Mechanics GATE Preparation MaterialDocument5 pagesFluid Mechanics GATE Preparation MaterialAkash SoniNo ratings yet
- Normal Moveout Correction (NMODocument18 pagesNormal Moveout Correction (NMOMajid AliNo ratings yet
- Seismic Migration: Imaging of Acoustic Energy by Wave Field ExtrapolationFrom EverandSeismic Migration: Imaging of Acoustic Energy by Wave Field ExtrapolationNo ratings yet
- Terrestrial Depositional Systems: Deciphering Complexities through Multiple Stratigraphic MethodsFrom EverandTerrestrial Depositional Systems: Deciphering Complexities through Multiple Stratigraphic MethodsKate E. ZeiglerNo ratings yet
- Paper - 1980 - A New Technique For Preventing Control Windup - R HanusDocument6 pagesPaper - 1980 - A New Technique For Preventing Control Windup - R HanusSinggih Satrio WibowoNo ratings yet
- Paper - 1983 - Functional Integration of Vertical Flight Path and Speed Control Using Energy Principles - Antonius A LambregtsDocument21 pagesPaper - 1983 - Functional Integration of Vertical Flight Path and Speed Control Using Energy Principles - Antonius A LambregtsSinggih Satrio WibowoNo ratings yet
- Paper - 1977 - The Stochastic Control of The F-8C Aircraft Using A Multiple Model Adaptive Control Part I - Michael AthansDocument13 pagesPaper - 1977 - The Stochastic Control of The F-8C Aircraft Using A Multiple Model Adaptive Control Part I - Michael AthansSinggih Satrio WibowoNo ratings yet
- Integrated Flight and Propulsion Control Using Total Energy PrinciplesDocument12 pagesIntegrated Flight and Propulsion Control Using Total Energy PrinciplesSinggih Satrio WibowoNo ratings yet
- Paper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Document10 pagesPaper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Singgih Satrio WibowoNo ratings yet
- Full Envelope Six-Degree of Freedom Simulation of Tactical Missile, R1 - SSW - 2019Document13 pagesFull Envelope Six-Degree of Freedom Simulation of Tactical Missile, R1 - SSW - 2019Singgih Satrio WibowoNo ratings yet
- Paper - Contribution of LLR To Fundamental Astronomy - Chapront - 2001Document6 pagesPaper - Contribution of LLR To Fundamental Astronomy - Chapront - 2001Singgih Satrio WibowoNo ratings yet
- Paper - 1970 - Development of Airplane Stability and Control Technology - Courtland D PerkinsDocument12 pagesPaper - 1970 - Development of Airplane Stability and Control Technology - Courtland D PerkinsSinggih Satrio WibowoNo ratings yet
- SijziDocument45 pagesSijziabuzaiNo ratings yet
- Constructive Geometry - John G Kerr - 1904Document135 pagesConstructive Geometry - John G Kerr - 1904Singgih Satrio WibowoNo ratings yet
- Paper - A Method For Predicting The First Sighting of The New Crescent Moon - B D Yallop - 1998Document17 pagesPaper - A Method For Predicting The First Sighting of The New Crescent Moon - B D Yallop - 1998Singgih Satrio WibowoNo ratings yet
- Ibn al-Ha'im's Theory of the Moon in His Zij al-KamilDocument29 pagesIbn al-Ha'im's Theory of the Moon in His Zij al-KamilSinggih Satrio WibowoNo ratings yet
- Paper - (Suhayl 02) Astronomical Handbooks and Tables From The Islamic World (750-1900) - D A King - 2001Document97 pagesPaper - (Suhayl 02) Astronomical Handbooks and Tables From The Islamic World (750-1900) - D A King - 2001Singgih Satrio WibowoNo ratings yet
- Paper - (Suhayl 02) A Universal Plate For Timekeeping by The Stars by Habash Al-Hasib Text - Francois Charette - 2001Document53 pagesPaper - (Suhayl 02) A Universal Plate For Timekeeping by The Stars by Habash Al-Hasib Text - Francois Charette - 2001Singgih Satrio WibowoNo ratings yet
- Paper - Spreadsheets Solution of Systems of Nonliear Differential Equations - Ali El Hajj - 2005Document15 pagesPaper - Spreadsheets Solution of Systems of Nonliear Differential Equations - Ali El Hajj - 2005Singgih Satrio WibowoNo ratings yet
- Paper - A Method For Determining Astronomical Latitude and Longitude by Observing Only Time and Angles - J C Bhattacharji - 1959Document20 pagesPaper - A Method For Determining Astronomical Latitude and Longitude by Observing Only Time and Angles - J C Bhattacharji - 1959Singgih Satrio WibowoNo ratings yet
- Paper - A Modular Software Infrastructure For Distributed Control of Collaborating UAVs - Allison Ryan - 2006Document10 pagesPaper - A Modular Software Infrastructure For Distributed Control of Collaborating UAVs - Allison Ryan - 2006Singgih Satrio WibowoNo ratings yet
- Paper - DARPAAFRLNASA Smart Wing Second Wind Tunnel Test Results - L. B. Scherer - 2004Document11 pagesPaper - DARPAAFRLNASA Smart Wing Second Wind Tunnel Test Results - L. B. Scherer - 2004Singgih Satrio WibowoNo ratings yet
- Paper - The Boyle's Law Simulator, A Dynamic Interactive Visualization - S A Sinex - 2008 PDFDocument9 pagesPaper - The Boyle's Law Simulator, A Dynamic Interactive Visualization - S A Sinex - 2008 PDFSinggih Satrio WibowoNo ratings yet
- Paper - Spreadsheets in Mathematics Accessibility, Creativity, and Fun - Arganbright - 2006Document10 pagesPaper - Spreadsheets in Mathematics Accessibility, Creativity, and Fun - Arganbright - 2006Singgih Satrio WibowoNo ratings yet
- Appendix - Blade Element Momentum TheoryDocument24 pagesAppendix - Blade Element Momentum TheorySinggih Satrio WibowoNo ratings yet
- SEISMOLOGY, Lecture 1Document32 pagesSEISMOLOGY, Lecture 1Singgih Satrio WibowoNo ratings yet
- Paper - Book Review, The Active Modeler Mathematical Modeling With Microsoft Excel - Kieran F Lim - 2005Document8 pagesPaper - Book Review, The Active Modeler Mathematical Modeling With Microsoft Excel - Kieran F Lim - 2005Singgih Satrio WibowoNo ratings yet
- SEISMOLOGY LECTURE 3 ELASTIC WAVE EQUATIONDocument24 pagesSEISMOLOGY LECTURE 3 ELASTIC WAVE EQUATIONSinggih Satrio WibowoNo ratings yet
- Paper - Spreadsheets in Education, The First 25 Years - John Baker - 2007Document28 pagesPaper - Spreadsheets in Education, The First 25 Years - John Baker - 2007Singgih Satrio WibowoNo ratings yet
- Paper - Spreadsheet Numerical Modelling in Secondary School Physics and Biology - Jan Benacka - 2008Document12 pagesPaper - Spreadsheet Numerical Modelling in Secondary School Physics and Biology - Jan Benacka - 2008Singgih Satrio WibowoNo ratings yet
- Aerial Robotics Lecture 1B - 5 Agility and ManoeuvrabilityDocument4 pagesAerial Robotics Lecture 1B - 5 Agility and ManoeuvrabilityIain McCulloch100% (1)
- Oral and Practical Tests: MechanicDocument19 pagesOral and Practical Tests: MechanicHugo AlmeidaNo ratings yet
- A JIT Lot Splitting Model For Supply Chain Management Enhancing Buyer Supplier Linkage 2003 International Journal of Production EconomicsDocument10 pagesA JIT Lot Splitting Model For Supply Chain Management Enhancing Buyer Supplier Linkage 2003 International Journal of Production EconomicsDaniel Renaldo SimanjuntakNo ratings yet
- Multi-disciplinary profile of IS/IT outsourcing researchDocument47 pagesMulti-disciplinary profile of IS/IT outsourcing researchIsabel MirandaNo ratings yet
- Standardization of Welding ElectrodesDocument8 pagesStandardization of Welding ElectrodesAqsa BanoNo ratings yet
- 3M Cold Shrink Cable Joints MV HV 11kV 33kV 66kV BrochureDocument4 pages3M Cold Shrink Cable Joints MV HV 11kV 33kV 66kV BrochureMohammed MustafaNo ratings yet
- Complex Instruction Set ComputerDocument17 pagesComplex Instruction Set ComputerkangkanpaulNo ratings yet
- Usage of Regular Expressions in NLPDocument7 pagesUsage of Regular Expressions in NLPInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Flow Charts Option: StartDocument13 pagesFlow Charts Option: StartbalabooksNo ratings yet
- Next Gen Ford Ranger Digital BrochureDocument10 pagesNext Gen Ford Ranger Digital BrochureTri BureauNo ratings yet
- 460 (Part-2)Document16 pages460 (Part-2)rambinod0% (1)
- Sectional Results: Sofistik 2020Document28 pagesSectional Results: Sofistik 2020ec05226No ratings yet
- Revit Domoty 1Document1 pageRevit Domoty 1SAN RAKSANo ratings yet
- Measurement & Calculation of Vehicle Center of Gravity Using Portable Wheel ScalesDocument11 pagesMeasurement & Calculation of Vehicle Center of Gravity Using Portable Wheel ScalesVedant KodagiNo ratings yet
- DTH Equipment - Product - Catalogue - tcm45-3560033 PDFDocument48 pagesDTH Equipment - Product - Catalogue - tcm45-3560033 PDFJALFARORONo ratings yet
- Thermostats and Dial Thermometers PDFDocument252 pagesThermostats and Dial Thermometers PDFAsep MustopaNo ratings yet
- TASK 1 Physics Class XI: (Do Always Any Five Numerical Problems Related To The Chapter)Document3 pagesTASK 1 Physics Class XI: (Do Always Any Five Numerical Problems Related To The Chapter)frank 101No ratings yet
- multirab ura signaling issuesDocument1 pagemultirab ura signaling issuessha0% (1)
- Pressure Regulators (DRV Valve) Suitable ForDocument4 pagesPressure Regulators (DRV Valve) Suitable ForNOUREDDINE BERCHAOUANo ratings yet
- Reliance Jio Industry AnalysisDocument45 pagesReliance Jio Industry AnalysisBhavya BhartiNo ratings yet
- Physical and Rheological Properties of Modified Sulfur Asphalt BinderDocument8 pagesPhysical and Rheological Properties of Modified Sulfur Asphalt Binderramesh naikNo ratings yet
- Time Table Spring 2017 18Document10 pagesTime Table Spring 2017 18SuvamNo ratings yet
- Abbreviations Plumbing Symbols: Fort Worth DistrictDocument21 pagesAbbreviations Plumbing Symbols: Fort Worth DistrictDenzel NgNo ratings yet
- Describe The Physical Properties of Propylene Glycols.: PrintDocument4 pagesDescribe The Physical Properties of Propylene Glycols.: PrintKaarthicNatarajanNo ratings yet
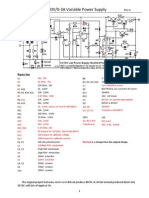
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Document2 pagesModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraNo ratings yet
- Ansul Wheeled RedLine 150lb F-2002046Document4 pagesAnsul Wheeled RedLine 150lb F-2002046German Duvan HernandezNo ratings yet
- Instructions For Installation, Operating and Maintenance InstructionDocument30 pagesInstructions For Installation, Operating and Maintenance InstructionmilacronNo ratings yet