You might also like
- Mecanica Practica MruDocument5 pagesMecanica Practica MruClaudia GutierrezNo ratings yet
- Ejercicios ResueltosDocument4 pagesEjercicios ResueltosFati75% (12)
- Diseño de Transformador de Baja PotenciaDocument6 pagesDiseño de Transformador de Baja PotenciaEDdy Santiago Valle Arce100% (1)
- 07 - Control Todo o NadaDocument22 pages07 - Control Todo o Nadaguns_anroses5064No ratings yet
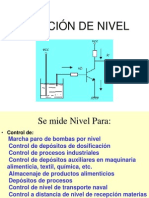
- Medición de NivelDocument37 pagesMedición de NivelEDdy Santiago Valle ArceNo ratings yet
- Sensores de AproximaciónDocument21 pagesSensores de AproximaciónEDdy Santiago Valle ArceNo ratings yet
- Interfaces de PotenciaDocument44 pagesInterfaces de PotenciaEDdy Santiago Valle Arce0% (1)
- Válvula AntirretornoDocument7 pagesVálvula AntirretornoEDdy Santiago Valle ArceNo ratings yet
- PLD Dispitivos Logicos Programables ExpoDocument38 pagesPLD Dispitivos Logicos Programables ExpoEDdy Santiago Valle ArceNo ratings yet
- Fibra Optica AereaDocument24 pagesFibra Optica AereaEDdy Santiago Valle Arce100% (2)
- 1 PorticosDocument122 pages1 PorticosmicaNo ratings yet
- Apunte de Factor de Seguridad y Teorias de Fallo+Document18 pagesApunte de Factor de Seguridad y Teorias de Fallo+ricardo manuel lennon barahonaNo ratings yet
- TEMA 01 Resistencia A La Fatiga - IntroduccionDocument13 pagesTEMA 01 Resistencia A La Fatiga - Introduccionjose mamaniNo ratings yet
- Conv1 1ELA2020Document7 pagesConv1 1ELA2020Antonio Carvajal GómezNo ratings yet
- Examen de Metrologia 1Document2 pagesExamen de Metrologia 1Romer BaltazarNo ratings yet
- Trabajo Potencia EnergiaDocument14 pagesTrabajo Potencia EnergiaDaniel MorenoNo ratings yet
- Radio Enlace MikrotikDocument24 pagesRadio Enlace MikrotikAldo IgddNo ratings yet
- DIFUSIVIDADDocument18 pagesDIFUSIVIDADGabriel Castro CamposNo ratings yet
- Cuestionario Lab 1Document4 pagesCuestionario Lab 1Alvaro AlcantaraNo ratings yet
- Trabajo 2 CinemáticaDocument24 pagesTrabajo 2 CinemáticaDavid HerreraNo ratings yet
- Anexo 1Document8 pagesAnexo 1Gabriela PulidoNo ratings yet
- Problemas Tercer Parcial (v.1Document4 pagesProblemas Tercer Parcial (v.1Nataly FernándezNo ratings yet
- Informe de Estatica-Cuerpos SumergidosDocument20 pagesInforme de Estatica-Cuerpos SumergidosYulissa Tocto SanchezNo ratings yet
- Plantilla de Guia de Laboratorio 6.1Document3 pagesPlantilla de Guia de Laboratorio 6.1oscar pavaNo ratings yet
- Configuración Electronica y Los Numeros CuanticosDocument54 pagesConfiguración Electronica y Los Numeros Cuanticosmarco castilloNo ratings yet
- Dinamica Lineal y RotacionalDocument7 pagesDinamica Lineal y RotacionalcarlangaschelysNo ratings yet
- FicoDocument2 pagesFicoSebastiánNo ratings yet
- Primera Ley de La TermodinamicaDocument32 pagesPrimera Ley de La TermodinamicacleyserNo ratings yet
- CAP 4prop. Del Gas SecoDocument48 pagesCAP 4prop. Del Gas SecoUribe FernandoNo ratings yet
- Taller PalancasDocument3 pagesTaller PalancasLiliana LópezNo ratings yet
- Ecuaciones Diferenciales Lineales y No LinealesDocument9 pagesEcuaciones Diferenciales Lineales y No LinealesRaquel LoaizaNo ratings yet
- PIA061Document21 pagesPIA061Jesus IbarraNo ratings yet
- Retroalimentacion Anexo 1 Ejercicios y Formato Tarea 2 358-2Document32 pagesRetroalimentacion Anexo 1 Ejercicios y Formato Tarea 2 358-2Chris Kyle0% (1)
- Problema 12.4. Tuberias en Paralelo PDFDocument6 pagesProblema 12.4. Tuberias en Paralelo PDFITZAYANA GUADALUPE CONTRERAS CARTASNo ratings yet
- Movimiento Armónico SimpleDocument14 pagesMovimiento Armónico SimpleEdisson SaquingaNo ratings yet
- Trabajo de Investigacion de OndasDocument17 pagesTrabajo de Investigacion de OndasJonny DamianNo ratings yet
- Equipo Proyecto IntegradorDocument4 pagesEquipo Proyecto IntegradorJesus MartínezNo ratings yet
- Informe FisicaDocument10 pagesInforme Fisicajuan henao galvezNo ratings yet