You might also like
- Digital Clock: University of MumbaiDocument19 pagesDigital Clock: University of MumbaiShinde D PoojaNo ratings yet
- Introduction To Control Engineering: Andy Pomfret and Tim ClarkeDocument54 pagesIntroduction To Control Engineering: Andy Pomfret and Tim ClarkemmmNo ratings yet
- Ece 15Document38 pagesEce 15api-3737228No ratings yet
- Seesaw Report GMIT 2011 (Physics and Instrumentation Course)Document55 pagesSeesaw Report GMIT 2011 (Physics and Instrumentation Course)kaineuhausNo ratings yet
- A LabVIEW Based Autonomous Airship Flight ControllerDocument112 pagesA LabVIEW Based Autonomous Airship Flight ControllerLeo100% (1)
- Solartrackingsystem 121110013734 Phpapp02 NewDocument23 pagesSolartrackingsystem 121110013734 Phpapp02 NewManjunath ThamminidiNo ratings yet
- Siso-Gpcit: Generalized Predictive ControlDocument43 pagesSiso-Gpcit: Generalized Predictive ControlsalgulsenNo ratings yet
- Control EngineeringDocument19 pagesControl EngineeringAmirul Zahim AzharNo ratings yet
- SCARE-1Document171 pagesSCARE-1marvel homesNo ratings yet
- Control of Discrete Event Systems: Technical Reports (CIS)Document38 pagesControl of Discrete Event Systems: Technical Reports (CIS)Diego HenriqueNo ratings yet
- Jeanne Fourie - FRXJEA004 - Evaluation of Matlab and SimulinkDocument19 pagesJeanne Fourie - FRXJEA004 - Evaluation of Matlab and SimulinkJeanne FourieNo ratings yet
- 1NH11EE730Document84 pages1NH11EE730Pranava BharadvajNo ratings yet
- Boram: Balancing Robot Using Arduino and Lego: Kyungjae Baik (9193618) September 10, 2008Document26 pagesBoram: Balancing Robot Using Arduino and Lego: Kyungjae Baik (9193618) September 10, 2008Carlos Solon Soares Guimarães Jr.No ratings yet
- Adaptrackituserguide v1 2Document34 pagesAdaptrackituserguide v1 2api-298724333No ratings yet
- Siprotec Input / Output Unit With Local Control 6MD63Document48 pagesSiprotec Input / Output Unit With Local Control 6MD63GustavoJanitoNo ratings yet
- Robust Control of Time-Delay SystemsDocument242 pagesRobust Control of Time-Delay Systemsdede sumantriNo ratings yet
- Comparisons Between Different Hybrid Statistical Models For Accurate Forecasting of Photovoltaic Systems PowerDocument125 pagesComparisons Between Different Hybrid Statistical Models For Accurate Forecasting of Photovoltaic Systems PowerandcretiNo ratings yet
- Thesis Paper ''Design of Traffic Light Controller Based On Single Chip Microcomputer''.Document30 pagesThesis Paper ''Design of Traffic Light Controller Based On Single Chip Microcomputer''.Majedur Rahman RejaNo ratings yet
- 2007 a survey on teleoperation相关的学习基础,全面Document34 pages2007 a survey on teleoperation相关的学习基础,全面faint0431No ratings yet
- Traffic Simulation Toolbox: User's ManualDocument24 pagesTraffic Simulation Toolbox: User's Manualakram1978No ratings yet
- um2066-getting-started-with-the-stpm3x--stmicroelectronics (1)Document23 pagesum2066-getting-started-with-the-stpm3x--stmicroelectronics (1)David_MacielNo ratings yet
- Control Systems With Regard To Power Systems - RowleyBatten09Document40 pagesControl Systems With Regard To Power Systems - RowleyBatten09Rahul ChakrabartiNo ratings yet
- Arduino Micro Controller Processing For Everyone Part IIDocument244 pagesArduino Micro Controller Processing For Everyone Part IIh_aa_h100% (1)
- Eworld Dev 0.9 AlphaDocument89 pagesEworld Dev 0.9 Alphazouba1No ratings yet
- Proposal Line FollowerDocument18 pagesProposal Line FollowerMelkamu SimenehNo ratings yet
- UserManual 1.5Document64 pagesUserManual 1.5rodrigo rochaNo ratings yet
- Performance Analysis of Time and Frequency Synchronization TechniquesDocument48 pagesPerformance Analysis of Time and Frequency Synchronization TechniquesMerawi WubishetNo ratings yet
- Quadruped Walking Running SimulationDocument49 pagesQuadruped Walking Running SimulationbilynbkNo ratings yet
- Fir Low PowerDocument39 pagesFir Low PowerMadhu GautamNo ratings yet
- Understanding Dynamic Signal Analysis AN1405-2Document32 pagesUnderstanding Dynamic Signal Analysis AN1405-2ElmioNo ratings yet
- MatDyn1 2Document35 pagesMatDyn1 2Miguel AcbNo ratings yet
- DVP-PLC Application Manual 【Programming】 Table of ContentsDocument586 pagesDVP-PLC Application Manual 【Programming】 Table of Contentsmubs73No ratings yet
- 5287 Full Ducument Rotary Position SensorsDocument66 pages5287 Full Ducument Rotary Position Sensorsprajta2857No ratings yet
- Traffic and Road Condition Monitoring System: M.Tech - Stage 1 ReportDocument26 pagesTraffic and Road Condition Monitoring System: M.Tech - Stage 1 ReportjairofgfNo ratings yet
- K. Deergha Rao - Signals and Systems (2018, Birkhäuser) - 2Document434 pagesK. Deergha Rao - Signals and Systems (2018, Birkhäuser) - 2Eugenie medaNo ratings yet
- Control of Environmental Parameters in A Green HouseDocument46 pagesControl of Environmental Parameters in A Green Housekenbobalaji100% (1)
- Lte SimDocument60 pagesLte SimLạnh BuốtNo ratings yet
- Chapter 1 Embedded System DesignDocument57 pagesChapter 1 Embedded System DesignRakesh GuptaNo ratings yet
- SNA AssignmentDocument50 pagesSNA AssignmentabdullahNo ratings yet
- Signals and Systems by K. Deergha RaoDocument434 pagesSignals and Systems by K. Deergha RaoJorge Marcillo100% (1)
- Ebook RSP PDFDocument83 pagesEbook RSP PDFRohit KumarNo ratings yet
- Supervisory Control and Data Acquisition System Design For CO2 Enhanced Oil RecoveryDocument26 pagesSupervisory Control and Data Acquisition System Design For CO2 Enhanced Oil RecoveryMartino Ojwok AjangnayNo ratings yet
- PowerGrid A Computation Engine For LargeDocument18 pagesPowerGrid A Computation Engine For LargeVARALAKSHMI SEERAPUNo ratings yet
- Modern Control Engineering: Analysis and Design TechniquesDocument23 pagesModern Control Engineering: Analysis and Design TechniquesekaNo ratings yet
- Realization of A Sigma-Delta Modulator in FpgaDocument76 pagesRealization of A Sigma-Delta Modulator in FpgaNishant SinghNo ratings yet
- SC4050: Integration Project Control of Inverted Pendulum: Robert Babuska / Gabriel LopesDocument27 pagesSC4050: Integration Project Control of Inverted Pendulum: Robert Babuska / Gabriel LopesShekhar GuptaNo ratings yet
- IMS BenchmarkDocument12 pagesIMS BenchmarkPrasad Kale0% (1)
- Inverted Pendulum MATLAB Manual GuideDocument37 pagesInverted Pendulum MATLAB Manual GuidenutanayaNo ratings yet
- Lab Manual Part 2 TIMS PDFDocument183 pagesLab Manual Part 2 TIMS PDFChris AmedjonekouNo ratings yet
- Advanced PIC Microcontroller Projects in C: From USB to RTOS with the PIC 18F SeriesFrom EverandAdvanced PIC Microcontroller Projects in C: From USB to RTOS with the PIC 18F SeriesRating: 5 out of 5 stars5/5 (1)
- Deep Space Optical CommunicationsFrom EverandDeep Space Optical CommunicationsHamid HemmatiNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- Managing reverse logistics using system dynamics: A generic end-to-end approachFrom EverandManaging reverse logistics using system dynamics: A generic end-to-end approachNo ratings yet
- Practical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsFrom EverandPractical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsRating: 5 out of 5 stars5/5 (6)
- Nonlinear Traction Control Design for Parallel Hybrid VehiclesFrom EverandNonlinear Traction Control Design for Parallel Hybrid VehiclesNo ratings yet
- Social Systems Engineering: The Design of ComplexityFrom EverandSocial Systems Engineering: The Design of ComplexityCésar García-DíazNo ratings yet
- Embedded DSP Processor Design: Application Specific Instruction Set ProcessorsFrom EverandEmbedded DSP Processor Design: Application Specific Instruction Set ProcessorsNo ratings yet
- Electrical Theory: Howard W Penrose, PH.D., CMRP InstructorDocument79 pagesElectrical Theory: Howard W Penrose, PH.D., CMRP InstructorSandun LakminaNo ratings yet
- Matlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsDocument14 pagesMatlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsAli AhmadNo ratings yet
- PH Alkalinity ExplainedDocument4 pagesPH Alkalinity ExplainedDean DsouzaNo ratings yet
- AC MaintenanceDocument21 pagesAC MaintenanceAli AhmadNo ratings yet
- Matlab Training Session Ii Data Presentation: 2-D PlotsDocument8 pagesMatlab Training Session Ii Data Presentation: 2-D PlotsAli AhmadNo ratings yet
- Matlab Training - Basic Control TheoryDocument10 pagesMatlab Training - Basic Control TheoryhamedNo ratings yet
- The Purpose of Business Activity: LECTURE # 01 & 02Document9 pagesThe Purpose of Business Activity: LECTURE # 01 & 02Ali AhmadNo ratings yet
- Lecture 2 - 30-01-08Document17 pagesLecture 2 - 30-01-08Ali AhmadNo ratings yet
- The Purpose of Business Activity: LECTURE # 01 & 02Document9 pagesThe Purpose of Business Activity: LECTURE # 01 & 02Ali AhmadNo ratings yet
- Matlab Training Session Vii Basic Signal Processing: Frequency Domain AnalysisDocument8 pagesMatlab Training Session Vii Basic Signal Processing: Frequency Domain AnalysisAli AhmadNo ratings yet
- Jan 2008 Course Outline FinanceDocument5 pagesJan 2008 Course Outline FinanceAli AhmadNo ratings yet
- MATLAB M-files Scripts and Functions GuideDocument6 pagesMATLAB M-files Scripts and Functions Guideederdiego2709No ratings yet
- Business Management Process Improvement LectureDocument26 pagesBusiness Management Process Improvement LectureAli AhmadNo ratings yet
- Matlab Training - SIMULINKDocument8 pagesMatlab Training - SIMULINKAtta RehmanNo ratings yet
- Printing The Model:: SimulinkDocument8 pagesPrinting The Model:: SimulinkAli AhmadNo ratings yet
- Matlab Training - SIMULINKDocument8 pagesMatlab Training - SIMULINKAtta RehmanNo ratings yet
- Introduction To VHDL: AIR University AU, E-9, IslamabadDocument29 pagesIntroduction To VHDL: AIR University AU, E-9, IslamabadAli AhmadNo ratings yet
- SIMULATING DYNAMIC SYSTEMS USING MATLABDocument9 pagesSIMULATING DYNAMIC SYSTEMS USING MATLABAli AhmadNo ratings yet
- 2-Level Logic ( 0', 1') .: Introduction To ASIC DesignDocument8 pages2-Level Logic ( 0', 1') .: Introduction To ASIC DesignAli AhmadNo ratings yet
- Operators: Introduction To ASIC DesignDocument6 pagesOperators: Introduction To ASIC DesignAli AhmadNo ratings yet
- Lecture 2Document26 pagesLecture 2Ali AhmadNo ratings yet
- Introduction To: Artificial IntelligenceDocument31 pagesIntroduction To: Artificial IntelligenceAli AhmadNo ratings yet
- Table of Contents DocumentDocument11 pagesTable of Contents DocumentAli AhmadNo ratings yet
- 5.1 Multiplexer #1 Using Operators WHEN/ELSEDocument10 pages5.1 Multiplexer #1 Using Operators WHEN/ELSEAli AhmadNo ratings yet
- Small Neural Nets LabDocument6 pagesSmall Neural Nets LabAli AhmadNo ratings yet
- System On Chips Soc'S & Multiprocessor System On Chips MpsocsDocument42 pagesSystem On Chips Soc'S & Multiprocessor System On Chips MpsocsAli AhmadNo ratings yet
- Sequential Code in VHDLDocument42 pagesSequential Code in VHDLAli Ahmad0% (1)
- Introduction To ASIC Design: Lab Report InstructionsDocument1 pageIntroduction To ASIC Design: Lab Report InstructionsAli AhmadNo ratings yet
- Multiply and Accumulate Circuits LabDocument5 pagesMultiply and Accumulate Circuits LabAli AhmadNo ratings yet
- Introduction To ASIC Design: Lab Report StandardsDocument1 pageIntroduction To ASIC Design: Lab Report StandardsAli AhmadNo ratings yet
- Contemporary Device TreeDocument25 pagesContemporary Device TreeChairil AnwarNo ratings yet
- Huawei BTS3006C Base Station Technical Manual System OverviewDocument36 pagesHuawei BTS3006C Base Station Technical Manual System OverviewImran KhaliqNo ratings yet
- Chapter 5Document10 pagesChapter 5HTV AT ChannelNo ratings yet
- k3 PDFDocument46 pagesk3 PDFNILESHNo ratings yet
- Vt-Vrpa2-5 - 1XRTPDocument8 pagesVt-Vrpa2-5 - 1XRTPPanca AriefNo ratings yet
- C264-R Application: Modular Remote Terminal UnitDocument4 pagesC264-R Application: Modular Remote Terminal UnitLa Picarona del PeruNo ratings yet
- Test Bank For Modern Electronic Communication 9th Edition Jeff Beasley DownloadDocument3 pagesTest Bank For Modern Electronic Communication 9th Edition Jeff Beasley Downloadkendrataylorygwedrfzcn100% (23)
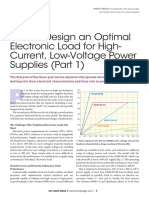
- HowTodesign - Electronic LoadDocument4 pagesHowTodesign - Electronic LoadraduseicaNo ratings yet
- 2080-IF4u 4-Channel Universal Analog Input Module: Micro800™Document2 pages2080-IF4u 4-Channel Universal Analog Input Module: Micro800™Aaron Ibarra San DiegoNo ratings yet
- BXR 25Document4 pagesBXR 25Vijay NaniNo ratings yet
- Calibrating Brymen MultimeterDocument3 pagesCalibrating Brymen MultimetermatkopNo ratings yet
- Exercices Transistors Cor PDFDocument5 pagesExercices Transistors Cor PDFAhmed GuetatNo ratings yet
- 2016 Ch1-Intro PDFDocument16 pages2016 Ch1-Intro PDFTrần Anh TânNo ratings yet
- Instruction Book Iqan-Xa2: Publ No HY17-8385-IB/UK Edition 0505Document38 pagesInstruction Book Iqan-Xa2: Publ No HY17-8385-IB/UK Edition 0505Munawar DoankNo ratings yet
- Pacific Antenna Easy TR Switch KitDocument8 pagesPacific Antenna Easy TR Switch KitRu RickjamesNo ratings yet
- RTL Digital SystemsDocument5 pagesRTL Digital SystemsgdeepthiNo ratings yet
- YaDeLi Prod 2 Nov 2010Document26 pagesYaDeLi Prod 2 Nov 2010dwi104No ratings yet
- Analyzing Voltage Sags and Interruptions Caused by FaultsDocument112 pagesAnalyzing Voltage Sags and Interruptions Caused by Faultsraghav4life8724No ratings yet
- DENSO Diagnostic TipsDocument1 pageDENSO Diagnostic TipsVerona MamaiaNo ratings yet
- Cyclo ConverterDocument17 pagesCyclo ConverterSai Pranahita KulithalaiNo ratings yet
- Compal Confidential: Schematics Document PAW20Document42 pagesCompal Confidential: Schematics Document PAW20Carlos Alberto Miranda PerezNo ratings yet
- Minor Project SynopsisDocument3 pagesMinor Project SynopsisChanchal Kumar0% (2)
- The UML-51 / ELV-5R: Advance Elevator ControllerDocument25 pagesThe UML-51 / ELV-5R: Advance Elevator ControllerCristian Millan100% (1)
- Design and Modeling of InductorsNPAryanDocument88 pagesDesign and Modeling of InductorsNPAryanJoe MullerNo ratings yet
- Altai A8n Catalog Eng 160810Document2 pagesAltai A8n Catalog Eng 160810Mahmoud Ben RahalNo ratings yet
- Chopper ReportDocument37 pagesChopper ReportcoolsinghrkNo ratings yet
- Mini Economy Series - DVR User GuideDocument7 pagesMini Economy Series - DVR User GuideDeathLordNo ratings yet
- LTE Parameter RelatedDocument47 pagesLTE Parameter RelatedsalafrfNo ratings yet
- A History of Microwave Filter Research, Design, and DevelopmentDocument15 pagesA History of Microwave Filter Research, Design, and Developmentsanjeevsoni64No ratings yet
- Daewoo Model Dwl-28w8Document53 pagesDaewoo Model Dwl-28w8livionetespanNo ratings yet