You might also like
- DK1915 CH20Document9 pagesDK1915 CH20gao379No ratings yet
- Case Study: Composite Bearingrolling Elements and Fluid Film in SeriesDocument26 pagesCase Study: Composite Bearingrolling Elements and Fluid Film in Seriesgao379No ratings yet
- Testing of Friction and WearDocument19 pagesTesting of Friction and Weargao379No ratings yet
- DK1915 CH12Document70 pagesDK1915 CH12gao379100% (1)
- DK1915 CH16Document9 pagesDK1915 CH16gao379No ratings yet
- DK1915 CH10Document55 pagesDK1915 CH10gao379No ratings yet
- Hydrodynamic Bearings Under Dynamic ConditionsDocument10 pagesHydrodynamic Bearings Under Dynamic Conditionsgao379No ratings yet
- DK1915 CH17Document16 pagesDK1915 CH17gao379No ratings yet
- Bearing Life Calculation and DesidnDocument124 pagesBearing Life Calculation and DesidnBen MorissetteNo ratings yet
- Bearing Materials: 11.1 Fundamental Principles of TribologyDocument41 pagesBearing Materials: 11.1 Fundamental Principles of Tribologygao379No ratings yet
- Design Charts For Finite-Length Journal BearingsDocument35 pagesDesign Charts For Finite-Length Journal Bearingsgao379100% (2)
- Practical Applications of Journal BearingsDocument16 pagesPractical Applications of Journal Bearingsgao379100% (1)
- Long Hydrodynamic Journal BearingsDocument29 pagesLong Hydrodynamic Journal Bearingsgao379No ratings yet
- DK1915 CH07Document14 pagesDK1915 CH07gao379100% (1)
- Principles of Hydrodynamic Lubrication: Fig. 1-2 Fig. 1-3Document27 pagesPrinciples of Hydrodynamic Lubrication: Fig. 1-2 Fig. 1-3gao379No ratings yet
- Fundamental Properties of LubricantsDocument20 pagesFundamental Properties of Lubricantsgao379No ratings yet
- Basic Hydrodynamic EquationsDocument24 pagesBasic Hydrodynamic Equationsgao379No ratings yet
- dk1915 ch01Document32 pagesdk1915 ch01andriaerospaceNo ratings yet
- DK1915 CH02Document14 pagesDK1915 CH02gao379No ratings yet
- DK1915 BibDocument9 pagesDK1915 Bibgao379No ratings yet
- Appendix A: Units and de Nitions of Material PropertiesDocument10 pagesAppendix A: Units and de Nitions of Material Propertiesgao379No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
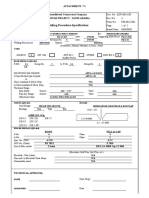
- Consolidated Contractors Welding Procedure SpecificationDocument3 pagesConsolidated Contractors Welding Procedure Specificationsiva8000100% (1)
- Group 7 Final Project PhysicsDocument8 pagesGroup 7 Final Project PhysicsJoshua Ray MananquilNo ratings yet
- General Catalog 2011: SELCO S.R.LDocument194 pagesGeneral Catalog 2011: SELCO S.R.LPapp ZsoltNo ratings yet
- OSHA safety standards and engineering reference sheetsDocument452 pagesOSHA safety standards and engineering reference sheetsobaniceNo ratings yet
- h06961 Accu PulseDocument1 pageh06961 Accu PulsekirankirkNo ratings yet
- BWP Catalogo de Partes FrenosDocument508 pagesBWP Catalogo de Partes FrenosLuis HernándezNo ratings yet
- BMW 2 - M5 - Engine - S62B50 PDFDocument26 pagesBMW 2 - M5 - Engine - S62B50 PDFkukumarcic0% (1)
- Engineering Components Material Data SheetDocument1 pageEngineering Components Material Data SheetanishgirmeNo ratings yet
- Diesel engine efficiency and power calculationsDocument11 pagesDiesel engine efficiency and power calculationsMarc Graham Nacua100% (1)
- Steel Structure Fabrication Work: Inspection and Test Plan (Itp)Document6 pagesSteel Structure Fabrication Work: Inspection and Test Plan (Itp)Togar Richard SihotangNo ratings yet
- 7 - In. Posiset Thru-Tubing Plug (2 / - In. Od) : Description FeaturesDocument1 page7 - In. Posiset Thru-Tubing Plug (2 / - In. Od) : Description Featureshamed1725No ratings yet
- Catalogo Repuestos YBR125DX 2008 ColombiaDocument58 pagesCatalogo Repuestos YBR125DX 2008 ColombiaadrielairaldoNo ratings yet
- Modern Bulk Storage Tanks Design & ManufacturingDocument2 pagesModern Bulk Storage Tanks Design & ManufacturingSCALE Ingeniería y ConstrucciónNo ratings yet
- Aerodynamic Ground EffectDocument12 pagesAerodynamic Ground EffectLev SorkinNo ratings yet
- Lecture - Convective Heat TransferDocument17 pagesLecture - Convective Heat TransferPaul Bryan OcampoNo ratings yet
- Properties of Natural Gas and Condensate SystemsDocument80 pagesProperties of Natural Gas and Condensate SystemsHashem HashemNo ratings yet
- Understanding The Complexities of Designing Diaphragms in Buildings For EarthquakesDocument21 pagesUnderstanding The Complexities of Designing Diaphragms in Buildings For Earthquakesjunhe898No ratings yet
- Inspection DT Scania 21633Document8 pagesInspection DT Scania 21633Sarohman RohmanNo ratings yet
- Pressure Relief Valve Fig.1319Document2 pagesPressure Relief Valve Fig.1319fernandoNo ratings yet
- Resistance Welding: Introduction and Recent Developments: S. Tripathy & Ajitav SahooDocument6 pagesResistance Welding: Introduction and Recent Developments: S. Tripathy & Ajitav SahooTJPRC PublicationsNo ratings yet
- Hydraulic Puller Operating InstructionsDocument5 pagesHydraulic Puller Operating InstructionsMasterrNo ratings yet
- Characteristics Series CE, CP, C: 2 Way Slip-In Cartridge ValvesDocument17 pagesCharacteristics Series CE, CP, C: 2 Way Slip-In Cartridge Valvess_waqarNo ratings yet
- Product CatalogDocument106 pagesProduct CatalogAri AzadNo ratings yet
- Modelling, Identification and Control of A 2 DOF Helicopter PrototypeDocument6 pagesModelling, Identification and Control of A 2 DOF Helicopter PrototypeosdacavNo ratings yet
- Error Codes PDFDocument22 pagesError Codes PDFcristian93% (15)
- Katalog CaprariDocument26 pagesKatalog CaprariNazar HusseinNo ratings yet
- A40hpv08completemanual PDFDocument215 pagesA40hpv08completemanual PDFEbin RiazNo ratings yet
- 1.C.1 Limitations On The Work That Can Be Supplied by A Heat EngineDocument30 pages1.C.1 Limitations On The Work That Can Be Supplied by A Heat EnginekamsNo ratings yet
- Final Twoway SlabDocument20 pagesFinal Twoway Slabvishnumani3011No ratings yet
- Vertical turbine, axial, and mixed flow pumps guideDocument10 pagesVertical turbine, axial, and mixed flow pumps guideKitikhun VichanarksornsitNo ratings yet