You might also like
- Manual de implementación de herramientas digitales para el desarrollo sostenibleFrom EverandManual de implementación de herramientas digitales para el desarrollo sostenibleRating: 5 out of 5 stars5/5 (1)
- Examen Parcial Geodesia G 2020-1 PDFDocument2 pagesExamen Parcial Geodesia G 2020-1 PDFJose Villarreal OroscoNo ratings yet
- Manual de Geomatica ExamenDocument59 pagesManual de Geomatica ExamenMarina Altamirano100% (1)
- Examen CaminosDocument6 pagesExamen CaminosJunior Huaytalla PizarroNo ratings yet
- Informes Suelosii PDFDocument72 pagesInformes Suelosii PDFWitman CrCzNo ratings yet
- Informe Rio ChilcaDocument10 pagesInforme Rio ChilcaJesus GuerraNo ratings yet
- Examen Final - Irrigaciones-Seccion ADocument3 pagesExamen Final - Irrigaciones-Seccion Aanon_885737559No ratings yet
- Obras HidraulicasDocument53 pagesObras HidraulicasAxl Quiroz EspetiaNo ratings yet
- Afianzamiento HidricoDocument16 pagesAfianzamiento HidricoHugo Benito RojasNo ratings yet
- Silabo PavimentosDocument11 pagesSilabo PavimentosRAFAEL TABOADA TABOADANo ratings yet
- Examen Final Irrigaciones 2018Document2 pagesExamen Final Irrigaciones 2018Ronel Barrios QuispeNo ratings yet
- 4.1. - 2 Examen Parcial - Pregunta 01Document1 page4.1. - 2 Examen Parcial - Pregunta 01MARIA DE LOS ANGELES MATAMOROS BUSTAMANTENo ratings yet
- Test de Laboratorio 4 Ec-511h - 2021-1Document1 pageTest de Laboratorio 4 Ec-511h - 2021-1Roger Jhonatan Huaracha QuispeNo ratings yet
- Informe 3Document25 pagesInforme 3Joe Huaranccay QuispeNo ratings yet
- Tesis UNSCH Ivan Ayala - LatexDocument388 pagesTesis UNSCH Ivan Ayala - LatexWilfredo Soto Leon100% (1)
- Memoria Descriptiva PDFDocument32 pagesMemoria Descriptiva PDFWiliams Lizana VillanuevaNo ratings yet
- Informe de CarreteraDocument30 pagesInforme de CarreteradieguitoNo ratings yet
- Informe 1 - Mecánica de Fluidos 2Document21 pagesInforme 1 - Mecánica de Fluidos 2DILMER_HTS_92No ratings yet
- Práctica Calificada #1Document4 pagesPráctica Calificada #1Marco López ChilcaNo ratings yet
- Silabus Dinamica PDFDocument11 pagesSilabus Dinamica PDFAlexander Eyzaguirre CuadrosNo ratings yet
- Informe de Zona Vulnerable - RIO MANTARODocument12 pagesInforme de Zona Vulnerable - RIO MANTAROEcg GuerreroNo ratings yet
- Trabajo Escalonado 2Document43 pagesTrabajo Escalonado 2luis angel lopez palpaNo ratings yet
- Diseño de Pergolas UnschDocument12 pagesDiseño de Pergolas Unschrenzo jairNo ratings yet
- Informe Programa en Excel para El Diseño Zapatas PDFDocument7 pagesInforme Programa en Excel para El Diseño Zapatas PDFFredy C. Ochoa100% (2)
- Informe Topografico OyonDocument16 pagesInforme Topografico OyonLuis Yldefonso100% (1)
- Marco Teorico HidrologiaDocument8 pagesMarco Teorico HidrologiaMiguel Segovia0% (2)
- Estudio Hidrologico Rio DisparateDocument20 pagesEstudio Hidrologico Rio DisparateIvan AndrewsNo ratings yet
- 1.4 (B) Estudio Hidrologico de La Quebrada Atacocha-1Document67 pages1.4 (B) Estudio Hidrologico de La Quebrada Atacocha-1Donny Laurente Raimundo100% (1)
- Sesion 01 - Eia Fic UniDocument28 pagesSesion 01 - Eia Fic UniMiguel Eduardo Principe EspinozaNo ratings yet
- Silabos Arquitectura 2018-II-1Document8 pagesSilabos Arquitectura 2018-II-1Anonymous TzDSVUIzWpNo ratings yet
- Determinación de La Et Real Del Cultivo de OcaDocument85 pagesDeterminación de La Et Real Del Cultivo de OcaJulio César PaccoNo ratings yet
- Problemas de Geodinámica Externa Que Afectan A Obras Civiles-FRankDocument7 pagesProblemas de Geodinámica Externa Que Afectan A Obras Civiles-FRankFrank Eduardo Ramírez Gutierrez100% (1)
- Cuenca Baja y Alta Rio Cachi (Hidrología)Document25 pagesCuenca Baja y Alta Rio Cachi (Hidrología)LurdesVelasqueGNo ratings yet
- Reiteracion y RepeticionDocument33 pagesReiteracion y RepeticionJonathan Carlos CallacaNo ratings yet
- Topografia y Caminos 2Document15 pagesTopografia y Caminos 2renancitoNo ratings yet
- Formulario de HidrologiaDocument10 pagesFormulario de HidrologiaJhonatanHuertaNo ratings yet
- 01 Silabo Costos y Presupuestos 2018Document4 pages01 Silabo Costos y Presupuestos 2018LuisReyesMolinaNo ratings yet
- 1er Examen Hidro 13 Nov 2020Document1 page1er Examen Hidro 13 Nov 2020camilefuentesNo ratings yet
- Datos Técnicos Del Puente ChilinaDocument7 pagesDatos Técnicos Del Puente ChilinaEd Cuyo AlvarezNo ratings yet
- Cuenca Chancay HuaralDocument93 pagesCuenca Chancay HuaralBaz Fer DiegoNo ratings yet
- Informe Fotogrametria UnfvDocument18 pagesInforme Fotogrametria UnfvJenchluis Ricardo Verde CarbajalNo ratings yet
- Trabajo Oruxmaps 5.0Document44 pagesTrabajo Oruxmaps 5.0MICHAEL RONAL MONTES CAPCHA100% (1)
- HIDROLOGÌA-Ing - Máximo Villón PDFDocument216 pagesHIDROLOGÌA-Ing - Máximo Villón PDFharoladriano21100% (1)
- 1.perfil Longitudinal Del Terreno PDFDocument14 pages1.perfil Longitudinal Del Terreno PDFEusebio Tocas MenaNo ratings yet
- Trabajo de Irrigación y Diseño de Obras HidráulicasDocument69 pagesTrabajo de Irrigación y Diseño de Obras HidráulicasConquistandoteRomexsNo ratings yet
- GRUPO2 - LABO2 Fluidos 2 FIC UNIDocument27 pagesGRUPO2 - LABO2 Fluidos 2 FIC UNISMITH CALIXTO NUÑEZ NUÑEZNo ratings yet
- Informe n5 de Fisica Dinamica de RotacionDocument16 pagesInforme n5 de Fisica Dinamica de RotacionWilmer Pinedo HNo ratings yet
- Informe NivelaciónDocument16 pagesInforme NivelaciónJerson Vicuña CanevaroNo ratings yet
- Examen Programacion AplazadosDocument1 pageExamen Programacion AplazadosCARLO DANIEL QUISPE VALENZUELANo ratings yet
- Cuenca Ayaviri - MelgarDocument21 pagesCuenca Ayaviri - MelgarTurpo Cayo Marx100% (1)
- Analsis Saltos y TendenciasDocument28 pagesAnalsis Saltos y TendenciasMichael LeivaNo ratings yet
- Características de Los Aforos Del Río VilcanotaDocument10 pagesCaracterísticas de Los Aforos Del Río VilcanotaMichel H. Cueva PortalNo ratings yet
- Carga Unitaria 2020Document13 pagesCarga Unitaria 2020Paul Valdiglesias TriveñoNo ratings yet
- Dianmica Recurso HidricosDocument15 pagesDianmica Recurso HidricosFrancy RojasNo ratings yet
- Informe VISITA TECNICA A IGP Y A CISMID - UNI - SISMOLOGÍADocument20 pagesInforme VISITA TECNICA A IGP Y A CISMID - UNI - SISMOLOGÍAFreddy Wilson Pachamango CalderonNo ratings yet
- Semana 6 - Ejercicios Prácticos - ANALISIS ESTRUCTURAL I (18234)Document3 pagesSemana 6 - Ejercicios Prácticos - ANALISIS ESTRUCTURAL I (18234)LEONEL VILCANo ratings yet
- Trabajo de Investigacion 2Document18 pagesTrabajo de Investigacion 2VadNo ratings yet
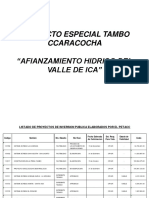
- Acciones y Logros 2009 - PetaccDocument17 pagesAcciones y Logros 2009 - Petacchenry_114_1No ratings yet
- Etapas de Un Levantamiento TopográficoDocument2 pagesEtapas de Un Levantamiento Topográficoxkhqk7x8qdNo ratings yet
- Informe GeodesiaDocument25 pagesInforme Geodesiagearella villalobos rojasNo ratings yet
- Elementos Finitos Aplicados A La Interacción Estática Suelo - EstructuraDocument4 pagesElementos Finitos Aplicados A La Interacción Estática Suelo - EstructuraIG ClaudiaNo ratings yet
- Memoria Estructuras Dra Jonislla 5pisos Oct22Document26 pagesMemoria Estructuras Dra Jonislla 5pisos Oct22Rocky ABNo ratings yet
- MV 106Document34 pagesMV 106Vale OrtizNo ratings yet
- Curso MATLABDocument116 pagesCurso MATLABBraulio Andres Stuardo ChandiaNo ratings yet
- 1 Macizos Rocosos GeocontrolDocument17 pages1 Macizos Rocosos GeocontrolRocky ABNo ratings yet
- Planilla de Metrados Cuerpo de PresaDocument12 pagesPlanilla de Metrados Cuerpo de PresaRocky AB100% (1)
- ESPECTROSDocument235 pagesESPECTROSAlex Darwin Soto VelascoNo ratings yet
- Capacidad Portante (TERZAGHY & VESIC)Document2 pagesCapacidad Portante (TERZAGHY & VESIC)Joaquin Sandoval HerreraNo ratings yet
- Tipos de Socavación en PuentesDocument51 pagesTipos de Socavación en PuentesRocky ABNo ratings yet
- Consideraciones Sobre Diseño de PresasDocument51 pagesConsideraciones Sobre Diseño de PresasRocky ABNo ratings yet
- 1 PB PDFDocument22 pages1 PB PDFRocky ABNo ratings yet
- ArmaduraDocument19 pagesArmaduraRocky ABNo ratings yet
- PR 2011 Tarambis FluidoEstructuraDocument340 pagesPR 2011 Tarambis FluidoEstructuraRocky ABNo ratings yet
- Libro 1Document4 pagesLibro 1Rocky ABNo ratings yet
- Cuadro de Clasificación de SuelosDocument12 pagesCuadro de Clasificación de SuelosRocky ABNo ratings yet
- Preugntas CeicDocument1 pagePreugntas CeicRocky ABNo ratings yet
- Libro 1Document3 pagesLibro 1Rocky ABNo ratings yet
- Disegno de VigasDocument4 pagesDisegno de VigasRocky ABNo ratings yet
- Qué Es El PSIDocument11 pagesQué Es El PSIRocky ABNo ratings yet
- Preugntas CeicDocument1 pagePreugntas CeicRocky ABNo ratings yet
- Diseño de NudosDocument3 pagesDiseño de NudosRocky ABNo ratings yet
- Cap19 Muros EstructuralesDocument52 pagesCap19 Muros EstructuralesYanina Cabrera SochaNo ratings yet
- Diseno de Muros de CorteDocument20 pagesDiseno de Muros de CorteJean Luis PozoNo ratings yet
- Muros de Corte o Placas - Roberto MoralesDocument41 pagesMuros de Corte o Placas - Roberto Moralesjavmen_sucreNo ratings yet
- Información Básica de Ingeniería Civil - CLASE de VIGAS en CONCRETO ARMADODocument5 pagesInformación Básica de Ingeniería Civil - CLASE de VIGAS en CONCRETO ARMADORocky ABNo ratings yet
- Determinacion de Tensiones y Momentos en DuctosDocument14 pagesDeterminacion de Tensiones y Momentos en Ductosdecaror2000No ratings yet
- Analisis y Diseño de Muros Estructurales de Concreto Considerando Las Experiencias de Los Terremotos de Chile 2010 y Nueva Zelanda 2011Document165 pagesAnalisis y Diseño de Muros Estructurales de Concreto Considerando Las Experiencias de Los Terremotos de Chile 2010 y Nueva Zelanda 2011Nekisto100% (1)
- Disegno de VigasDocument4 pagesDisegno de VigasRocky ABNo ratings yet
- Ejemplo CARACTERIZACION DE PROCESO APL 25 JulioDocument1 pageEjemplo CARACTERIZACION DE PROCESO APL 25 JulioNarda AldanaNo ratings yet
- Peligros en El Lugar de TrabajoDocument8 pagesPeligros en El Lugar de TrabajoHally HurtadoNo ratings yet
- Situación SignificativaDocument2 pagesSituación SignificativaJoel Dik MARCOS ESPINOZANo ratings yet
- Protocolo de Presentación de Tesis v4.3Document45 pagesProtocolo de Presentación de Tesis v4.3jhosmerNo ratings yet
- Investigación de Operaciones II - Unidad IIIDocument16 pagesInvestigación de Operaciones II - Unidad IIIIvan Araoz BaltazarNo ratings yet
- La Iglesia y El Ministerio A Los AdictosDocument5 pagesLa Iglesia y El Ministerio A Los AdictosBenNo ratings yet
- Grupos de Gramineas 1Document18 pagesGrupos de Gramineas 1Elio Jesus OliverosNo ratings yet
- SILABO Operatividad Maquina PDFDocument7 pagesSILABO Operatividad Maquina PDFCesarPercyNavarroNo ratings yet
- Chapter 7 - Enzymatic Quorum Quenching in Biofilms - 2019 - Quorum SensingDocument21 pagesChapter 7 - Enzymatic Quorum Quenching in Biofilms - 2019 - Quorum SensingFrancelia Quiñonez RuvalcabaNo ratings yet
- 3 PDFDocument2 pages3 PDFCesar ChNo ratings yet
- Proyecto Edu en NutDocument18 pagesProyecto Edu en NutMadai SotoNo ratings yet
- Resumen de DidacticaDocument13 pagesResumen de DidacticaLoana CabreraNo ratings yet
- Memoria Descriptiva Santa RosaDocument115 pagesMemoria Descriptiva Santa RosaRody Aliaga PalominoNo ratings yet
- Inserción de La Economía de Guatemala en El Proceso de GlobalizaciónDocument4 pagesInserción de La Economía de Guatemala en El Proceso de GlobalizaciónWayber Ingie Pérez100% (1)
- BiologiaDocument21 pagesBiologiaBadr AbdounNo ratings yet
- Ficha de Trabajo 7 - ElectroquimicaDocument5 pagesFicha de Trabajo 7 - ElectroquimicaFrancheska Torres ReyesNo ratings yet
- Equipos EstaticosDocument5 pagesEquipos Estaticossanty222100% (4)
- Guia Aritmetica 2Document1 pageGuia Aritmetica 2PABLO PARADANo ratings yet
- A5 DRMDocument8 pagesA5 DRMdariana reynosoNo ratings yet
- Tarea 2 - 03-22Document4 pagesTarea 2 - 03-22GABRIELA VICTORIA ESCOBAR GASPARNo ratings yet
- Modulación Por Codificación de PulsoDocument7 pagesModulación Por Codificación de PulsoAndres NavasNo ratings yet
- Elogio A La Ociosidad y Otros EnsayosDocument9 pagesElogio A La Ociosidad y Otros Ensayosleo1492No ratings yet
- Practica 2 C1, Circuito Resistivo Serie-ParaleloDocument6 pagesPractica 2 C1, Circuito Resistivo Serie-Paraleloisai0113368No ratings yet
- HS-PT-037 Protocolo de Empleo Del Pa Rche Transdérmico de BuprenorfinaDocument14 pagesHS-PT-037 Protocolo de Empleo Del Pa Rche Transdérmico de BuprenorfinaYubeidy Mailyn Castro PabonNo ratings yet
- Fase 5 Parte 2Document26 pagesFase 5 Parte 2Silvana GomezNo ratings yet
- Plan de Reforzamiento Académico EspañolDocument10 pagesPlan de Reforzamiento Académico EspañolXio MaraNo ratings yet
- Comercio Electrónico - Tarea 2 MairelyDocument2 pagesComercio Electrónico - Tarea 2 MairelyMAIRELY CRUZNo ratings yet
- Guía de Aprendizaje Unidad 4 - Ordenamientos, Autofiltros, Subtotales y CondicionalesDocument3 pagesGuía de Aprendizaje Unidad 4 - Ordenamientos, Autofiltros, Subtotales y CondicionalesJeannette LunaNo ratings yet
- Practico 2Document3 pagesPractico 2GABRIEL COCA MERIDANo ratings yet
- Variables Aleatorias Discretas PDFDocument3 pagesVariables Aleatorias Discretas PDFCarlos CoxNo ratings yet