You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Manual - Solutions-Electrical Machines, Drives and Power Systems 6th Ed. by WildiDocument109 pagesManual - Solutions-Electrical Machines, Drives and Power Systems 6th Ed. by WildiLeonardo Lira100% (3)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Service Manual: RP-6000 MK6 LTD RP-6000 MK6 BDocument44 pagesService Manual: RP-6000 MK6 LTD RP-6000 MK6 BFivor EdwardsNo ratings yet
- Geometry Glossary: M ABCDocument19 pagesGeometry Glossary: M ABCfree_progNo ratings yet
- Week 1b - Word Formation - ExercisesDocument2 pagesWeek 1b - Word Formation - Exercisesfree_progNo ratings yet
- Emhw 22Document2 pagesEmhw 22free_progNo ratings yet
- MATH2020A Advanced Calculus II, 2013-14 Assignment 8 Suggested SolutionDocument2 pagesMATH2020A Advanced Calculus II, 2013-14 Assignment 8 Suggested Solutionfree_progNo ratings yet
- MATH2020A Advanced Calculus II, 2013-14 Assignment 7 Suggested SolutionDocument1 pageMATH2020A Advanced Calculus II, 2013-14 Assignment 7 Suggested Solutionfree_progNo ratings yet
- MATH2020A Advanced Calculus II, 2013-14 Assignment 4 Suggested SolutionDocument2 pagesMATH2020A Advanced Calculus II, 2013-14 Assignment 4 Suggested Solutionfree_progNo ratings yet
- MATH2020A Advanced Calculus II, 2013-14 Assignment 5 Suggested SolutionDocument2 pagesMATH2020A Advanced Calculus II, 2013-14 Assignment 5 Suggested Solutionfree_progNo ratings yet
- hw1 SolnsDocument5 pageshw1 Solnsfree_progNo ratings yet
- MATH2020A Advanced Calculus II, 2013-14 Assignment 1 Suggested SolutionDocument3 pagesMATH2020A Advanced Calculus II, 2013-14 Assignment 1 Suggested Solutionfree_progNo ratings yet
- p7310 4Document1 pagep7310 4free_progNo ratings yet
- hw6 SolnsDocument4 pageshw6 Solnsfree_progNo ratings yet
- HW 1 SolDocument5 pagesHW 1 Solfree_progNo ratings yet
- Hamiltonian Dynamics: I I I I I IDocument13 pagesHamiltonian Dynamics: I I I I I Ifree_progNo ratings yet
- MP350 Classical Mechanics Rigid Body Motion - Summary SheetDocument2 pagesMP350 Classical Mechanics Rigid Body Motion - Summary Sheetfree_progNo ratings yet
- NHouse SelfBuilder Brochure v2 Jan19 LowresDocument56 pagesNHouse SelfBuilder Brochure v2 Jan19 LowresAndrew Richard ThompsonNo ratings yet
- 0707-Passive VoiceDocument6 pages0707-Passive VoiceKhôi TrầnNo ratings yet
- An Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageDocument10 pagesAn Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageChristian EmenikeNo ratings yet
- Facility Systems, Ground Support Systems, and Ground Support EquipmentDocument97 pagesFacility Systems, Ground Support Systems, and Ground Support EquipmentSree288No ratings yet
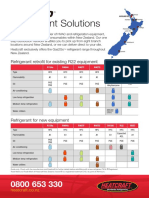
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDocument2 pagesRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoNo ratings yet
- Module IiDocument5 pagesModule IiFahmi PrayogiNo ratings yet
- Sunday Afternoon, October 27, 2013: TechnologyDocument283 pagesSunday Afternoon, October 27, 2013: TechnologyNatasha MyersNo ratings yet
- Intro To BiochemDocument2 pagesIntro To BiochemPeachy PieNo ratings yet
- EclipseDocument6 pagesEclipsetoncipNo ratings yet
- Local AnesthesiaDocument55 pagesLocal AnesthesiaAhmed MagdyNo ratings yet
- Eoq PDFDocument10 pagesEoq PDFविनय कुमार शर्माNo ratings yet
- Assembly Manual, Operation and Maintenance Round Vibrating Screen Model: Tav-Pvrd-120Document15 pagesAssembly Manual, Operation and Maintenance Round Vibrating Screen Model: Tav-Pvrd-120Sandro Garcia Olimpio100% (1)
- Planetary Characteristics: © Sarajit Poddar, SJC AsiaDocument11 pagesPlanetary Characteristics: © Sarajit Poddar, SJC AsiaVaraha Mihira100% (11)
- Integration of Phodi Process With Mutation in Bhoomi (Simultaneous Approval of Phodi and The Mutation)Document19 pagesIntegration of Phodi Process With Mutation in Bhoomi (Simultaneous Approval of Phodi and The Mutation)seshadrimn seshadrimnNo ratings yet
- Em - Animals A To ZDocument9 pagesEm - Animals A To ZgowriNo ratings yet
- MD 2 MidtermDocument31 pagesMD 2 MidtermRea Rebenque100% (1)
- Tyre Industry in IndiaDocument14 pagesTyre Industry in IndiaH Janardan PrabhuNo ratings yet
- Nestle Internship ResumeDocument2 pagesNestle Internship ResumeHasnain AshrafNo ratings yet
- Responsible Living: Mantri DevelopersDocument15 pagesResponsible Living: Mantri Developersnadaf8No ratings yet
- Static CMOS and Dynamic CircuitsDocument19 pagesStatic CMOS and Dynamic CircuitsAbhijna MaiyaNo ratings yet
- Rugelach Recipe From Monday Morning Cooking ClubDocument2 pagesRugelach Recipe From Monday Morning Cooking ClubAnonymous W5F9r2b2hNo ratings yet
- Toda People in IndiaDocument9 pagesToda People in IndiaAmoona KopiKoNo ratings yet
- Fermat Contest: Canadian Mathematics CompetitionDocument4 pagesFermat Contest: Canadian Mathematics Competitionสฮาบูดีน สาและNo ratings yet
- The Art of Logical ThinkingDocument210 pagesThe Art of Logical ThinkingAndyAyam100% (1)
- Here Is Why Skincare Is ImportantDocument3 pagesHere Is Why Skincare Is ImportantKevin OkunguNo ratings yet
- Miltel - Case Study, Steven Age, UKDocument2 pagesMiltel - Case Study, Steven Age, UKAnit SahuNo ratings yet
- DuctBank For Electrical SystemDocument4 pagesDuctBank For Electrical SystemAnonymous XYAPaxjbYNo ratings yet
- Paintings of Juan LunaDocument39 pagesPaintings of Juan LunaMiss MellowNo ratings yet
- IbnTaymiyyah Theological EthicsDocument361 pagesIbnTaymiyyah Theological EthicsDado Daki100% (1)