You might also like
- Calculation of Required Bollard Pull: BV Rules and FormulasDocument2 pagesCalculation of Required Bollard Pull: BV Rules and FormulasRahul JagdaleNo ratings yet
- Equipment Numeral Calculator For A ShipDocument16 pagesEquipment Numeral Calculator For A ShipBolarinwaNo ratings yet
- Barge Roll Motion PDFDocument8 pagesBarge Roll Motion PDFJym GensonNo ratings yet
- TowingDocument1 pageTowingRahul JagdaleNo ratings yet
- 4x 65 Ton AHTS Specification Rev 0Document85 pages4x 65 Ton AHTS Specification Rev 0pal_malay100% (1)
- NI184 Lifting AppliancesDocument344 pagesNI184 Lifting Appliancesksangeeth2000100% (1)
- COSLBoss PDFDocument2 pagesCOSLBoss PDFDenny HermawanNo ratings yet
- Surya Putra JayaDocument4 pagesSurya Putra JayaIhwan AsrulNo ratings yet
- Perhitungan Propeller MT AFDAL MAMMARDocument17 pagesPerhitungan Propeller MT AFDAL MAMMARMuhamad Rifki AfanNo ratings yet
- HSC Code 2000 PDFDocument251 pagesHSC Code 2000 PDFCarlos FrancoNo ratings yet
- Requirements Concerning Mooring, Anchoring and Towing: International Association of Classification SocietiesDocument34 pagesRequirements Concerning Mooring, Anchoring and Towing: International Association of Classification SocietiesBorza DorinNo ratings yet
- 3.2 Design Development of Corrugated BulkheadsDocument17 pages3.2 Design Development of Corrugated BulkheadsТеодора Недялкова100% (1)
- Bollard Rope Friction - The Load and Effort Force in The RopeDocument3 pagesBollard Rope Friction - The Load and Effort Force in The Ropesantoshgs191811No ratings yet
- IBS - IMO SEEMP Part II - Template (Blank Form)Document10 pagesIBS - IMO SEEMP Part II - Template (Blank Form)sakis papasNo ratings yet
- Scaldis - Installation VesselDocument18 pagesScaldis - Installation VesselJoel GancedoNo ratings yet
- Report 2 Gross Tonnage Crew Fresw Water Oil NeedDocument19 pagesReport 2 Gross Tonnage Crew Fresw Water Oil Needpsda kseNo ratings yet
- Fuel Oil Consumption Data Collection Plan SampleDocument2 pagesFuel Oil Consumption Data Collection Plan SampleJCANo ratings yet
- Anchor Chain Calibration: (Nama Kapal) (Pemilik)Document4 pagesAnchor Chain Calibration: (Nama Kapal) (Pemilik)Andriyas Rizky Widya PratamaNo ratings yet
- Part B. Mooring Equipment Design PhilosophyDocument37 pagesPart B. Mooring Equipment Design Philosophy郑辉No ratings yet
- Air Bag Launching SystemsDocument7 pagesAir Bag Launching SystemsJhon GreigNo ratings yet
- Bollard JIS F-2001Document1 pageBollard JIS F-2001andrewsmithbatam100% (1)
- Towing Plan-BES PioneerDocument1 pageTowing Plan-BES PioneerMahesh Kumar K BNo ratings yet
- UKOOA Management of Offshore Helideck Ops ISS5 Feb 05Document279 pagesUKOOA Management of Offshore Helideck Ops ISS5 Feb 05perkjartanNo ratings yet
- Syncro LiftDocument3 pagesSyncro Liftjoshivishal800No ratings yet
- Teras 361 Specs GA Updated 28.08.18Document4 pagesTeras 361 Specs GA Updated 28.08.18Cees van ZandvlietNo ratings yet
- Bow Thruster Tb35tDocument5 pagesBow Thruster Tb35tGiyan Arpero ManiaNo ratings yet
- WalkToWorkVessels DP Gezina DP GalynaDocument8 pagesWalkToWorkVessels DP Gezina DP GalynaOlympia HellasNo ratings yet
- Stability and Loading Scenario 58Document3 pagesStability and Loading Scenario 58Laurencia LaveniaNo ratings yet
- Stability Calculations by Barnes MethodDocument6 pagesStability Calculations by Barnes MethodgksahaNo ratings yet
- VWSDocument8 pagesVWSErwin Paulian SihombingNo ratings yet
- Presentation 1Document30 pagesPresentation 1BN JadhavNo ratings yet
- Ship EquipmentDocument3 pagesShip EquipmentviahulNo ratings yet
- Light Ship and Tonnage Check ListDocument9 pagesLight Ship and Tonnage Check ListLegend AnbuNo ratings yet
- Safety Guidelines For Design, Construction & Operation of TugsDocument50 pagesSafety Guidelines For Design, Construction & Operation of TugsTomash Verbitsky100% (2)
- 125 Ton AHTSSV SpecificationDocument86 pages125 Ton AHTSSV SpecificationChakma NhikiNo ratings yet
- Ship Fittings by A NyghDocument12 pagesShip Fittings by A NyghTyasno PrasetyoNo ratings yet
- 80 Ton AHTS Specification Rev 0Document81 pages80 Ton AHTS Specification Rev 0Mark Samsel RohanNo ratings yet
- ET Inc Exp NotesDocument7 pagesET Inc Exp NotesOrville monteiroNo ratings yet
- Double Bollards - Din 82607Document1 pageDouble Bollards - Din 82607Anca GeaninaNo ratings yet
- Deck Crane Lifting OperationsDocument9 pagesDeck Crane Lifting OperationsJitendra Kumar100% (1)
- Compro Citra Shipyard (SI) 091221Document64 pagesCompro Citra Shipyard (SI) 091221Dimas Arie KusumoNo ratings yet
- BS MA 55 Lifeboat WinchesDocument8 pagesBS MA 55 Lifeboat WinchesZohair AftabNo ratings yet
- Bollard RequirementDocument2 pagesBollard RequirementCaptIsqan100% (1)
- Vessel Due To ArriveDocument1 pageVessel Due To Arrivebasuki41cryptoNo ratings yet
- ISO 3913 1980 First RevisionDocument15 pagesISO 3913 1980 First RevisionDaniel SlavčićNo ratings yet
- Adinda Celinna - Ship Particular-1Document1 pageAdinda Celinna - Ship Particular-1kucing_batamNo ratings yet
- Pad Eyes DimensionDocument1 pagePad Eyes DimensionrewmarineNo ratings yet
- Shafting CalculationsDocument4 pagesShafting Calculationsmohammad shihabNo ratings yet
- Basic Stability For Small VesselsDocument43 pagesBasic Stability For Small VesselsHuascar Brito FeijoNo ratings yet
- Stability Calculation Form For MV MaineborgDocument9 pagesStability Calculation Form For MV MaineborgtrananhnganNo ratings yet
- LCT 600DWTDocument1 pageLCT 600DWTkucing_batamNo ratings yet
- 7.5 02 03 01.1 PDFDocument14 pages7.5 02 03 01.1 PDFidhoe81uh2132No ratings yet
- ITTCDocument14 pagesITTCAlham DulillahNo ratings yet
- Ship Resistance & Propulsion (Tutorial 1)Document10 pagesShip Resistance & Propulsion (Tutorial 1)Zulkarnain MustafarNo ratings yet
- ITTC High Speed Marine Vehicles-Propulsion TestDocument6 pagesITTC High Speed Marine Vehicles-Propulsion TestGayatri LakkimsettiNo ratings yet
- Propulsion PDFDocument98 pagesPropulsion PDFavciahmNo ratings yet
- 1978 ITTC Performance PredictionDocument31 pages1978 ITTC Performance PredictionqursenNo ratings yet
- Control of Marine PropellersDocument322 pagesControl of Marine PropellersPelmus LiviuNo ratings yet
- Volume2 1powering Perf Pred PDFDocument35 pagesVolume2 1powering Perf Pred PDFmedievoloNo ratings yet
- 7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFDocument25 pages7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFNestor Gómez RojasNo ratings yet
- T11BENGDocument159 pagesT11BENGAndre OliveiraNo ratings yet
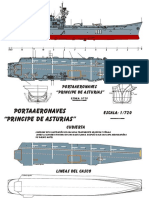
- Principe de AsturiasDocument2 pagesPrincipe de AsturiasAndre OliveiraNo ratings yet
- Autodyn Theory ManualDocument235 pagesAutodyn Theory ManualAndre OliveiraNo ratings yet
- ANSYS Mechanical ANSYS Mechanical Structural Nonlinearities: Rate Independent PlasticityDocument56 pagesANSYS Mechanical ANSYS Mechanical Structural Nonlinearities: Rate Independent PlasticityGz2239No ratings yet
- T03ENGDocument128 pagesT03ENGAndre OliveiraNo ratings yet
- Seismic Design According To Eurocode No. 8 and Ncse94: Civilfem Manual of Essential Examples. 300609 .Ingeciber, S.ADocument16 pagesSeismic Design According To Eurocode No. 8 and Ncse94: Civilfem Manual of Essential Examples. 300609 .Ingeciber, S.ACamv VenturaNo ratings yet
- T08ENGDocument32 pagesT08ENGAndre OliveiraNo ratings yet
- Example #14 Tunnel With Concrete Lining: Civilfem Manual of Advanced Examples - Ingeciber, S.A.Document14 pagesExample #14 Tunnel With Concrete Lining: Civilfem Manual of Advanced Examples - Ingeciber, S.A.Andre OliveiraNo ratings yet
- DM DeletFaceThicknesses ACT Extension Description v160 v1Document1 pageDM DeletFaceThicknesses ACT Extension Description v160 v1Andre OliveiraNo ratings yet
- E10ENGDocument41 pagesE10ENGAndre OliveiraNo ratings yet
- Example 21Document14 pagesExample 21Andre OliveiraNo ratings yet
- Non Linear Concrete: Civilfem Manual of Essential Examples. 300609 .Ingeciber, S.ADocument12 pagesNon Linear Concrete: Civilfem Manual of Essential Examples. 300609 .Ingeciber, S.AAndre OliveiraNo ratings yet
- E03ENGDocument12 pagesE03ENGAndre OliveiraNo ratings yet
- Example 7Document11 pagesExample 7Andre OliveiraNo ratings yet
- Example 13Document10 pagesExample 13Andre OliveiraNo ratings yet
- Example 2Document16 pagesExample 2Andre OliveiraNo ratings yet
- Example 5Document23 pagesExample 5Andre OliveiraNo ratings yet
- TDAS ACT Extension Description v160 v1Document1 pageTDAS ACT Extension Description v160 v1Andre OliveiraNo ratings yet
- Push-Over Analysis: Problem DescriptionDocument51 pagesPush-Over Analysis: Problem DescriptionAndre OliveiraNo ratings yet
- Example 8Document11 pagesExample 8Andre OliveiraNo ratings yet
- DM Cross Section Lib ACT Extension Description v160 v1Document1 pageDM Cross Section Lib ACT Extension Description v160 v1Andre OliveiraNo ratings yet
- CivilBay Crane Load Crane Runway Beam Design 1.0.0 ManualDocument112 pagesCivilBay Crane Load Crane Runway Beam Design 1.0.0 Manualwudongxiao3953100% (2)
- Tut 16Document36 pagesTut 16Andre OliveiraNo ratings yet
- Example 5Document23 pagesExample 5Andre OliveiraNo ratings yet
- 4 Polyflow - 12.1 Polyflow BDocument17 pages4 Polyflow - 12.1 Polyflow BAndre OliveiraNo ratings yet
- Mech-UCO 120 WS-07 FilterDocument32 pagesMech-UCO 120 WS-07 FilterAndre OliveiraNo ratings yet
- ReadmeDocument1 pageReadmeAndre OliveiraNo ratings yet
- Tutorial For Ansys Fluent Porous MediaDocument30 pagesTutorial For Ansys Fluent Porous MediaLykaios Schultz DohrnNo ratings yet
- Tug OperationsDocument14 pagesTug Operationsseamaniac100% (1)
- Application Form 1.personal DetailsDocument3 pagesApplication Form 1.personal DetailsRica VenturianuNo ratings yet
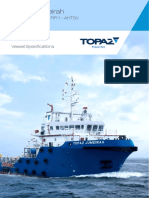
- Topaz Jumeirah Vessel SpecsDocument7 pagesTopaz Jumeirah Vessel SpecsJym GensonNo ratings yet
- THE NAVAL SERVICE of CANADA Its Official History VOLUME I ORIGINS AND EARLY YEARS by GILBERT NORMAN TUCKER, PH.D. (CANTAB.)Document473 pagesTHE NAVAL SERVICE of CANADA Its Official History VOLUME I ORIGINS AND EARLY YEARS by GILBERT NORMAN TUCKER, PH.D. (CANTAB.)Dana John NieldNo ratings yet
- MV RescuerDocument2 pagesMV RescuerselleriverketNo ratings yet
- Santa María (Ship) - WikipediaDocument7 pagesSanta María (Ship) - Wikipediakirthi83No ratings yet
- USCG Foreign Freight Vessel Examination BookDocument52 pagesUSCG Foreign Freight Vessel Examination Bookfredy2212No ratings yet
- IMLAM 2019 Moot Scenario FINAL 30.1.19 PDFDocument79 pagesIMLAM 2019 Moot Scenario FINAL 30.1.19 PDFBayu Calvin100% (1)
- Everything Wormhole 1.09Document79 pagesEverything Wormhole 1.09Jurek Z AriówNo ratings yet
- Voyage FlowchartDocument1 pageVoyage Flowchartumesh100% (1)
- 00 - Ship Design and Construction - Damage To Hull PDFDocument79 pages00 - Ship Design and Construction - Damage To Hull PDFEngineerAleNo ratings yet
- IAPH-WPSP Port Economic Impact Barometer: 9 April 2020Document6 pagesIAPH-WPSP Port Economic Impact Barometer: 9 April 2020Sacheel OrtizNo ratings yet
- EU Standards For BoatsDocument11 pagesEU Standards For BoatsRaniero FalzonNo ratings yet
- Fairmont Shipping Corp. and Fairwinds Ocean Carriers Corp., Owners of The Steamship Western Eagle v. Chevron International Oil Company, Inc., 511 F.2d 1252, 2d Cir. (1975)Document16 pagesFairmont Shipping Corp. and Fairwinds Ocean Carriers Corp., Owners of The Steamship Western Eagle v. Chevron International Oil Company, Inc., 511 F.2d 1252, 2d Cir. (1975)Scribd Government DocsNo ratings yet
- Paradip International Cargo TerminalDocument2 pagesParadip International Cargo TerminalmanpreetNo ratings yet
- JMS SNAME Paper 2010-1Document10 pagesJMS SNAME Paper 2010-1hgmNo ratings yet
- Ves05 Errv Survey Guidelines Issue 5Document42 pagesVes05 Errv Survey Guidelines Issue 5Shah GulNo ratings yet
- 100 Questions Answer 1Document188 pages100 Questions Answer 1Amy CastanedaNo ratings yet
- Form F (Abstracts of The Workmen's Compensation Act, 1923)Document6 pagesForm F (Abstracts of The Workmen's Compensation Act, 1923)Jignesh T. RayNo ratings yet
- Ultimate Load Capacities of Mooring Bollards and Hull Foundation StructuresDocument8 pagesUltimate Load Capacities of Mooring Bollards and Hull Foundation StructuresValentin Claudiu PapucNo ratings yet
- Brochure Sea Indonesia 2023.Document12 pagesBrochure Sea Indonesia 2023.legal bbsNo ratings yet
- KUNCI Jawaban LKS Ekcellent Bahasa Inggris Kelas XIIDocument16 pagesKUNCI Jawaban LKS Ekcellent Bahasa Inggris Kelas XIIXerxes Xanthe Xyza74% (23)
- NBPWS 1149 - Atlantic ShippingDocument4 pagesNBPWS 1149 - Atlantic ShippingЕгор ЛядовNo ratings yet
- Engine Room Technical EnglishDocument23 pagesEngine Room Technical EnglishCamilo Boeri VelozNo ratings yet
- Terminal Port Information and Regulations BookletDocument49 pagesTerminal Port Information and Regulations Bookletmohd1khairul1anuarNo ratings yet
- Marine Communication MSN 243: Introduction For The GMDSS Global Maritime Distress and Safety SystemDocument10 pagesMarine Communication MSN 243: Introduction For The GMDSS Global Maritime Distress and Safety SystemAboody AL-ghamdy100% (1)
- Inchmaree Clause Definition - InvestopediaDocument2 pagesInchmaree Clause Definition - InvestopediaRICROD71No ratings yet
- Ship Stability - Curves of Statical Stability Load Line Requirements For Minimum Stability ConditionsDocument3 pagesShip Stability - Curves of Statical Stability Load Line Requirements For Minimum Stability ConditionsAbd HafidzNo ratings yet
- IMO - BCH Code - 1994 PDFDocument86 pagesIMO - BCH Code - 1994 PDFAlex KulikNo ratings yet
- Floating Houses in Ijburg 75 Homes in Various Sectors Steigereiland Ijburg AmsterdamDocument19 pagesFloating Houses in Ijburg 75 Homes in Various Sectors Steigereiland Ijburg AmsterdamlineajonNo ratings yet
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AFrom EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANo ratings yet
- Electric Motors and Drives: Fundamentals, Types and ApplicationsFrom EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsRating: 4.5 out of 5 stars4.5/5 (12)
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Well Integrity for Workovers and RecompletionsFrom EverandWell Integrity for Workovers and RecompletionsRating: 5 out of 5 stars5/5 (3)
- Heat Transfer Engineering: Fundamentals and TechniquesFrom EverandHeat Transfer Engineering: Fundamentals and TechniquesRating: 4 out of 5 stars4/5 (1)
- Smart Power Distribution Systems: Control, Communication, and OptimizationFrom EverandSmart Power Distribution Systems: Control, Communication, and OptimizationNo ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Photovoltaic Solar Energy: From Fundamentals to ApplicationsFrom EverandPhotovoltaic Solar Energy: From Fundamentals to ApplicationsNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsFrom EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsNo ratings yet
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksFrom EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksNo ratings yet
- Renewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksFrom EverandRenewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksNo ratings yet