You might also like
- 1st Periodical Examination in Gen. MathDocument2 pages1st Periodical Examination in Gen. MathAndrea Patricia93% (14)
- HW 9 SolutionDocument5 pagesHW 9 SolutionJuan DavidNo ratings yet
- Matrix Analysis, BellmanDocument426 pagesMatrix Analysis, BellmanSofia Fuentes67% (3)
- Advanced Fluid Mechanics - Chapter 05 - Boundary Layer TheoryDocument33 pagesAdvanced Fluid Mechanics - Chapter 05 - Boundary Layer Theorysunil481No ratings yet
- Ocean Surface Gravity WavesDocument13 pagesOcean Surface Gravity WavesVivek ReddyNo ratings yet
- Chap5 ID Wave EqnDocument6 pagesChap5 ID Wave EqnSeshadri SNo ratings yet
- Homeworks PDFDocument58 pagesHomeworks PDFkiranepiitbNo ratings yet
- Lectures For ES912, Term 1, 2003.: December 7, 2003Document18 pagesLectures For ES912, Term 1, 2003.: December 7, 2003getsweetNo ratings yet
- Free Surface Water Waves Part 1Document13 pagesFree Surface Water Waves Part 1Ahmad Zuhairi AbdollahNo ratings yet
- Transmission Lines: (Geometric Model)Document11 pagesTransmission Lines: (Geometric Model)Hemanshu DasNo ratings yet
- Classnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityDocument51 pagesClassnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityGürkan YamanNo ratings yet
- Chap 1 and 2Document7 pagesChap 1 and 2ismaeil1365No ratings yet
- Wave EquationDocument8 pagesWave EquationaminNo ratings yet
- bk978 0 7503 1401 5ch1Document19 pagesbk978 0 7503 1401 5ch1Putu IndraNo ratings yet
- Surface IntegralsDocument18 pagesSurface Integralsmasyuki1979No ratings yet
- Notes 1 - Transmission Line TheoryDocument82 pagesNotes 1 - Transmission Line TheoryJaime MendozaNo ratings yet
- Tempspin 2Document5 pagesTempspin 2Jarryd RastiNo ratings yet
- 1 General Solution To Wave Equation: One Dimensional WavesDocument35 pages1 General Solution To Wave Equation: One Dimensional WaveswenceslaoflorezNo ratings yet
- NLW L15Document25 pagesNLW L15renatobellarosaNo ratings yet
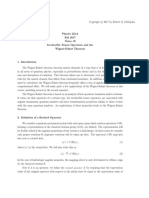
- Physics 303/573 Projectile Motion: 1 General CommentsDocument10 pagesPhysics 303/573 Projectile Motion: 1 General CommentsJLNo ratings yet
- Electrodynamics and Relativity: Immediately Not Accelerating NoDocument65 pagesElectrodynamics and Relativity: Immediately Not Accelerating No張恩睿 CHANG,EN-RUEI C24101147No ratings yet
- 2.57 Nano-to-Macro Transport Processes Fall 2004: F M F F FDocument5 pages2.57 Nano-to-Macro Transport Processes Fall 2004: F M F F FcaptainhassNo ratings yet
- Student Handout 14 2014Document18 pagesStudent Handout 14 2014kietniNo ratings yet
- This Content Downloaded From 140.112.26.187 On Mon, 10 Apr 2023 10:37:01 UTCDocument16 pagesThis Content Downloaded From 140.112.26.187 On Mon, 10 Apr 2023 10:37:01 UTCNothing ConnoisseurNo ratings yet
- Lecture14 Probset1.8Document4 pagesLecture14 Probset1.8JRNo ratings yet
- 11 AbociDocument10 pages11 AbocielectrotehnicaNo ratings yet
- What Is A Wave? Forward vs. Backward Propagating Waves The One-Dimensional Wave EquationDocument22 pagesWhat Is A Wave? Forward vs. Backward Propagating Waves The One-Dimensional Wave EquationEster DanielNo ratings yet
- Lec Week3asfasdfasdfDocument3 pagesLec Week3asfasdfasdfShahimulk KhattakNo ratings yet
- Q FV V: 2.57 Nano-to-Macro Transport Processes Fall 2004Document5 pagesQ FV V: 2.57 Nano-to-Macro Transport Processes Fall 2004captainhassNo ratings yet
- Mm3Cmt Computer Modelling: TechniquesDocument23 pagesMm3Cmt Computer Modelling: TechniquesTim WongNo ratings yet
- Assignment - 4: Applications of Derivatives: X 2! X 2 X 4! X 3! X 2! X 4! X 3! X 5! X 2 1 Cos X X /2 Sin C CDocument5 pagesAssignment - 4: Applications of Derivatives: X 2! X 2 X 4! X 3! X 2! X 4! X 3! X 5! X 2 1 Cos X X /2 Sin C CGanesh KumarNo ratings yet
- Numerical Analysis: Mass Transport Under WavesDocument19 pagesNumerical Analysis: Mass Transport Under WavesmehdiessaxNo ratings yet
- Material ScienceDocument21 pagesMaterial Scienceishika biswasNo ratings yet
- 1013 1877 1 SMDocument7 pages1013 1877 1 SMAgus Hendri WahyudiNo ratings yet
- Sol ADocument10 pagesSol AUsup SoemantriNo ratings yet
- CS 224 Problem Set 4 - SolutionsDocument3 pagesCS 224 Problem Set 4 - Solutionsfeng_ning_ding4153No ratings yet
- Viscous Fluid FlowDocument48 pagesViscous Fluid FlowTrym Erik Nielsen100% (1)
- Chapter 4 PDEDocument17 pagesChapter 4 PDEHui JingNo ratings yet
- (Massachusetts Institute of Technology: Mit Opencourseware)Document9 pages(Massachusetts Institute of Technology: Mit Opencourseware)asitiafNo ratings yet
- Sdof DynDocument29 pagesSdof DynAnkur KurmiNo ratings yet
- Notes On Solving The Black-Scholes EquationDocument20 pagesNotes On Solving The Black-Scholes EquationCaroline YanNo ratings yet
- Chapter 1 Mathematical Modelling by Differential Equations: Du DXDocument7 pagesChapter 1 Mathematical Modelling by Differential Equations: Du DXKan SamuelNo ratings yet
- Continuous Systems ShortDocument2 pagesContinuous Systems ShortShreyansh TibdewalNo ratings yet
- Some SolutionsDocument4 pagesSome SolutionsMinh BéoNo ratings yet
- Jpa 2007 PDFDocument14 pagesJpa 2007 PDFHAROON UR RASHIDNo ratings yet
- Chapter8 Latest Combined ComplejoDocument49 pagesChapter8 Latest Combined ComplejoLuis Carlos Gonzales RengifoNo ratings yet
- Superdiffusion in The Presence of A Reflecting BoundaryDocument8 pagesSuperdiffusion in The Presence of A Reflecting BoundaryWaqar HassanNo ratings yet
- 07 - Telegrapher EquationDocument9 pages07 - Telegrapher EquationSaddam HusainNo ratings yet
- Chapter 1 SolutionsDocument14 pagesChapter 1 SolutionsxdsxcNo ratings yet
- 2010 Fall With SolutionsDocument36 pages2010 Fall With SolutionsRay MondoNo ratings yet
- SolutionsDocument113 pagesSolutionsAlifNo ratings yet
- Periodic StructuresDocument37 pagesPeriodic StructuresVinicius UchoaNo ratings yet
- Goldstein 1 2 6 8 14 20Document7 pagesGoldstein 1 2 6 8 14 20Gopal KrishnaNo ratings yet
- Fall 2014 HW 11 SolnsDocument22 pagesFall 2014 HW 11 Solnsaleman844No ratings yet
- Vector MechanicsDocument7 pagesVector MechanicsAddin Najeeb100% (1)
- Chap7 Schrodinger Equation 1D Notes s12Document14 pagesChap7 Schrodinger Equation 1D Notes s12arwaNo ratings yet
- Oscillations2007 PDFDocument11 pagesOscillations2007 PDFaldo costradaNo ratings yet
- Assignment 4 SolutionsDocument8 pagesAssignment 4 SolutionsSam KumagaiNo ratings yet
- Gold ExercisesDocument26 pagesGold ExercisesJuan Carlos RuizNo ratings yet
- Wavelets 3Document29 pagesWavelets 3ac.diogo487No ratings yet
- Mecánica de Fluidos EjerciciosDocument7 pagesMecánica de Fluidos EjerciciosymailioNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Letter of Motivation4Document1 pageLetter of Motivation4Iuga VasileNo ratings yet
- Analysis and Design Methodologies For Robust Aeroservoelastic StructuresDocument11 pagesAnalysis and Design Methodologies For Robust Aeroservoelastic StructuresIuga VasileNo ratings yet
- Flow Field and Pressure Distribution Measurements On Blunt-Nosed Bodies at M 6.8Document38 pagesFlow Field and Pressure Distribution Measurements On Blunt-Nosed Bodies at M 6.8Iuga VasileNo ratings yet
- Vol.I (50) IB16Document8 pagesVol.I (50) IB16Iuga VasileNo ratings yet
- Aerodynamics - KrasnovDocument760 pagesAerodynamics - KrasnovFabiano HernandesNo ratings yet
- Missile Aerodynamics - Jack Nielsen - 1960Document233 pagesMissile Aerodynamics - Jack Nielsen - 1960Henrique da MataNo ratings yet
- Document 04HessSmithDocument9 pagesDocument 04HessSmithIuga VasileNo ratings yet
- Chapter 2Document57 pagesChapter 2jacob quizonNo ratings yet
- Ch1 Section2Document16 pagesCh1 Section2anuroy945No ratings yet
- B TechAEDocument169 pagesB TechAEvamshi jannuNo ratings yet
- Differentiation Pastpaper Question'sDocument13 pagesDifferentiation Pastpaper Question'sUrnext bestalternw100% (1)
- Calculus III Lecture NotesDocument391 pagesCalculus III Lecture NotesRafael AlmeidaNo ratings yet
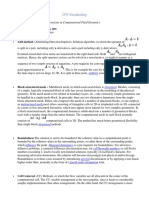
- CFD VocabularyDocument10 pagesCFD VocabularyAmir LachrafNo ratings yet
- 180 - de 01 - Matrix Associativity and OrthogonalityDocument1 page180 - de 01 - Matrix Associativity and OrthogonalityBradley NartowtNo ratings yet
- fp1pp June12Document55 pagesfp1pp June12Markus1234567No ratings yet
- Kerf Bending: Ruled Double Curved Surfaces Manufacturing: Mara CaponeDocument8 pagesKerf Bending: Ruled Double Curved Surfaces Manufacturing: Mara CaponeBruno RavioloNo ratings yet
- Grade 8 (Common Monomial Factoring-2nd Week) EditedDocument17 pagesGrade 8 (Common Monomial Factoring-2nd Week) EditedEmyren Apuya100% (1)
- 08 - Quadratic Equation - 22 PDFDocument22 pages08 - Quadratic Equation - 22 PDFShah RukhNo ratings yet
- Quant Daily Task Day - 115Document7 pagesQuant Daily Task Day - 115Aakash JaiwalNo ratings yet
- Trigonometry Table: Trigonometry Table 0 To 360: Trigonometry Is A Branch in Mathematics, Which Involves TheDocument3 pagesTrigonometry Table: Trigonometry Table 0 To 360: Trigonometry Is A Branch in Mathematics, Which Involves TheMaria Helen MarcelinoNo ratings yet
- MAT 120 NSU SyllabusDocument5 pagesMAT 120 NSU SyllabusChowdhury_Irad_2937100% (1)
- Practice Test: Chapter 7: Counting PrinciplesDocument8 pagesPractice Test: Chapter 7: Counting PrinciplesDoctor ViddaNo ratings yet
- 6928TARUN CLASSES OF MATHEMATIC9thDocument4 pages6928TARUN CLASSES OF MATHEMATIC9thSandyaNo ratings yet
- Chapter 4 - SolutionsDocument2 pagesChapter 4 - SolutionshnNo ratings yet
- Course Outline in Math 10Document2 pagesCourse Outline in Math 10ASV ARTS channelNo ratings yet
- S6 Worksheet 09Document7 pagesS6 Worksheet 09Jean Paul MUNAMA RUBAYIZANo ratings yet
- SS ZC416 Revised Course HandoutDocument6 pagesSS ZC416 Revised Course HandoutMohit SidhwaniNo ratings yet
- Lecture 3Document11 pagesLecture 3lvrevathiNo ratings yet
- Q2 - Mathematics 10 - Mod17 - Graphs and Polynomials Dunctions - v2Document28 pagesQ2 - Mathematics 10 - Mod17 - Graphs and Polynomials Dunctions - v2Ruby Rose B. Panganod-Araba100% (1)
- Polynomial FunctionsDocument29 pagesPolynomial FunctionsJessel PalermoNo ratings yet
- Ch18 PDF Official Sat Study Guide Passport Advanced MathDocument14 pagesCh18 PDF Official Sat Study Guide Passport Advanced MathyawahabNo ratings yet
- Lesson in Indefinite IntegralsDocument3 pagesLesson in Indefinite IntegralsYZRAJAEL CELZONo ratings yet
- Math e MagicDocument3 pagesMath e Magicchitra_shresthaNo ratings yet
- Suresh Nayak and Saurabh Singh: Perf Perf XDocument17 pagesSuresh Nayak and Saurabh Singh: Perf Perf XSaurabh SinghNo ratings yet
- Aqm Vector Op PDFDocument32 pagesAqm Vector Op PDFTudor PatuleanuNo ratings yet