You might also like
- In Signal ProcessingDocument16 pagesIn Signal ProcessingRamya ChinnaNo ratings yet
- Digital Image Wiener and Kalman FiltersDocument48 pagesDigital Image Wiener and Kalman FiltersfcikanNo ratings yet
- Weiner FilterDocument35 pagesWeiner FilterSreekanth PagadapalliNo ratings yet
- IntroductionDocument2 pagesIntroductionNoha GamalNo ratings yet
- FIR Filters Design and Window FunctionsDocument8 pagesFIR Filters Design and Window FunctionsGaneshVenkatachalamNo ratings yet
- Finite Impulse ResponseDocument6 pagesFinite Impulse ResponseYoga Putra PratamaNo ratings yet
- Adaptive Filtering Techniques for Noise ReductionDocument35 pagesAdaptive Filtering Techniques for Noise ReductionLouis NjorogeNo ratings yet
- Adaptive FilterDocument35 pagesAdaptive FilterSimranjeet Singh100% (2)
- Winer FilterDocument42 pagesWiner Filterjinto0007No ratings yet
- Real Time DSP: Professors: Eng. Julian Bruno Eng. Mariano Llamedo SoriaDocument29 pagesReal Time DSP: Professors: Eng. Julian Bruno Eng. Mariano Llamedo SoriaAli AkbarNo ratings yet
- Filtro Fir2Document16 pagesFiltro Fir2DarWin VinueZaNo ratings yet
- Wiener Filter Theory Explained in 40 CharactersDocument10 pagesWiener Filter Theory Explained in 40 CharacterssachuscribdNo ratings yet
- Least Squared Error FIR Filter Design With Transition BandsDocument14 pagesLeast Squared Error FIR Filter Design With Transition Bandsj1o2s3eNo ratings yet
- Variable Digital Filter Response Time in A Digital Distance RelayDocument22 pagesVariable Digital Filter Response Time in A Digital Distance RelayJorge A AguilarNo ratings yet
- Raised Cosine FilterDocument4 pagesRaised Cosine Filterneverdielv2No ratings yet
- Audio Sieving Using Signal FiltersDocument19 pagesAudio Sieving Using Signal FiltersPiyush YadavNo ratings yet
- Matched Filter - WikipediaDocument9 pagesMatched Filter - WikipediaPaidamoyo MuzvidziwaNo ratings yet
- Analytic Signals and Hilbert Transform FiltersDocument4 pagesAnalytic Signals and Hilbert Transform FiltersSubash Chandar AdikesavanNo ratings yet
- Finite Impulse Response Filter: Presentation By: Pravin Kumar SSN College of EngineeringDocument49 pagesFinite Impulse Response Filter: Presentation By: Pravin Kumar SSN College of Engineeringsach jonesNo ratings yet
- Module 3: Sampling & Reconstruction Lecture 26: Ideal Low Pass FilterDocument6 pagesModule 3: Sampling & Reconstruction Lecture 26: Ideal Low Pass FilterPrasad KavthakarNo ratings yet
- Linear Estimation of Signals in Digital Signal ProcessingDocument54 pagesLinear Estimation of Signals in Digital Signal ProcessingtadeleNo ratings yet
- Linear Estimation & Prediction: An Introduction to Wiener and Kalman FiltersDocument61 pagesLinear Estimation & Prediction: An Introduction to Wiener and Kalman FiltersabuNo ratings yet
- Detection of Radar Signals in NoiseDocument60 pagesDetection of Radar Signals in NoiseGajula SureshNo ratings yet
- Ch02 WienerFiltersLECTURE05Document37 pagesCh02 WienerFiltersLECTURE05DrIhsan Ul HaqNo ratings yet
- EqEquiripple Filter DesignDocument12 pagesEqEquiripple Filter DesignAnup ShuklaNo ratings yet
- FIR & IIR Filters in MATLAB: Design, Analysis and ComparisonDocument12 pagesFIR & IIR Filters in MATLAB: Design, Analysis and ComparisonvikreadingNo ratings yet
- 1.finite Impulse Response (FIR) FiltersDocument16 pages1.finite Impulse Response (FIR) FiltersSamet YılmazNo ratings yet
- Performance Analysis of Different Inverse Filter Design TechniquesDocument7 pagesPerformance Analysis of Different Inverse Filter Design TechniquesEditor IJSETNo ratings yet
- Mehta Vidhi (4102) Mistry Nitisha (4105) Patel Dhruvi (4118)Document34 pagesMehta Vidhi (4102) Mistry Nitisha (4105) Patel Dhruvi (4118)Himani LokhandeNo ratings yet
- Two-Sensor Adaptive Noise CancellationDocument5 pagesTwo-Sensor Adaptive Noise CancellationilgisizalakasizNo ratings yet
- Practical No: - 07: Aim: To Write A Program To Design Butterworth Filter Using Bilinear Transformation TheoryDocument14 pagesPractical No: - 07: Aim: To Write A Program To Design Butterworth Filter Using Bilinear Transformation TheoryAbhinav aroraNo ratings yet
- Estimation and Prediction TechniquesDocument14 pagesEstimation and Prediction TechniquesS.DurgaNo ratings yet
- Characterization of Phase Frequency Response of Four Analog Filter Approximation TechniquesDocument3 pagesCharacterization of Phase Frequency Response of Four Analog Filter Approximation TechniquespalmerxNo ratings yet
- Speech - Digital FilteringDocument4 pagesSpeech - Digital FilteringAlirezaZamaniNo ratings yet
- Assignment 0f PMDocument14 pagesAssignment 0f PMMirza AzeemNo ratings yet
- Diseño de Filtros IIR y FIRDocument11 pagesDiseño de Filtros IIR y FIRacajahuaringaNo ratings yet
- Question Bank ITDocument20 pagesQuestion Bank ITSreejith GopiNo ratings yet
- Echo Cancellation in Audio Signal Using LMS AlgorithmDocument6 pagesEcho Cancellation in Audio Signal Using LMS AlgorithmVa SuNo ratings yet
- Bandpass filter design using MatlabDocument9 pagesBandpass filter design using MatlabKikiKartikaDewiNo ratings yet
- Butterworth: Classic FiltersDocument5 pagesButterworth: Classic FiltersdfdgmtahNo ratings yet
- Lab 5Document3 pagesLab 5Sameera මලිත් WithanachchiNo ratings yet
- Ou N O11 N 34: Rmtriclloil " LLMDocument2 pagesOu N O11 N 34: Rmtriclloil " LLManjali9myneniNo ratings yet
- Adaptive Filtering TechniquesDocument17 pagesAdaptive Filtering TechniquesS.DurgaNo ratings yet
- Finite Impulse Response (Fir) : ObjectivesDocument9 pagesFinite Impulse Response (Fir) : ObjectivesAldon JimenezNo ratings yet
- 18ee63 DSP Module-3Document19 pages18ee63 DSP Module-3Appasabgouda BiradarNo ratings yet
- Adaptive Noise CancellerDocument9 pagesAdaptive Noise CancellerThomas mortonNo ratings yet
- Design of Equiripple Linear-Phase FIR Digital Filters LectureDocument65 pagesDesign of Equiripple Linear-Phase FIR Digital Filters LecturePutha KishoreNo ratings yet
- Applications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezDocument19 pagesApplications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezguyoaserNo ratings yet
- Finite Impulse ResponseDocument20 pagesFinite Impulse ResponseAlwyne ReyesNo ratings yet
- FIR FILTERS IMPLEMENTATION APPROACHES REPORTDocument14 pagesFIR FILTERS IMPLEMENTATION APPROACHES REPORTH052 Rajesh Komaravalli ECENo ratings yet
- Echo Cancellation Using LMS AlgorithmDocument5 pagesEcho Cancellation Using LMS AlgorithmPrabira Kumar SethyNo ratings yet
- Labview+pulse Shaping and Matched FilteringDocument12 pagesLabview+pulse Shaping and Matched FilteringcarolmNo ratings yet
- Lab.4&5. FIR FiltersDocument7 pagesLab.4&5. FIR FiltersKen MutaiNo ratings yet
- Lab.4&5. FIR FiltersDocument7 pagesLab.4&5. FIR Filtersآيـة جمال عبد الفتاح الراويNo ratings yet
- Designing FIR Filters Using Window TechniquesDocument42 pagesDesigning FIR Filters Using Window TechniquesİBRAHİM YÜMLÜNo ratings yet
- Oscillator Noise Analysis: Cyclostationary NoiseDocument12 pagesOscillator Noise Analysis: Cyclostationary Noisedeepakvaj25No ratings yet
- References of Nyquist FilterDocument22 pagesReferences of Nyquist FilterHanna AbejoNo ratings yet
- FFT Window Functions - Limits On FFT AnalysisDocument4 pagesFFT Window Functions - Limits On FFT AnalysisA. VillaNo ratings yet
- Digital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionFrom EverandDigital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionNo ratings yet
- System of A Down Lyrics - Chop Suey!Document2 pagesSystem of A Down Lyrics - Chop Suey!Sudipan SinghaNo ratings yet
- Find NTH Highest Salary - SQLDocument18 pagesFind NTH Highest Salary - SQLSudipan SinghaNo ratings yet
- A GATE AIR-1's Preparation - Sujith Kumar B's BlogDocument45 pagesA GATE AIR-1's Preparation - Sujith Kumar B's BlogSudipan SinghaNo ratings yet
- Unfiled Notes Oct 2010 Pgs 1-3Document3 pagesUnfiled Notes Oct 2010 Pgs 1-3Sudipan SinghaNo ratings yet
- Environmental Ethics - Wikipedia, The Free EncyclopediaDocument6 pagesEnvironmental Ethics - Wikipedia, The Free EncyclopediaSudipan SinghaNo ratings yet
- A GATE AIR-1's Preparation - Sujith Kumar B's BlogDocument45 pagesA GATE AIR-1's Preparation - Sujith Kumar B's BlogSudipan SinghaNo ratings yet
- Resizing ImagesDocument6 pagesResizing Imagessamcat2009No ratings yet
- IGS BrochureDocument8 pagesIGS Brochureebayb6No ratings yet
- A Case For Democratising Lobbying in India - The Hindu CentreDocument2 pagesA Case For Democratising Lobbying in India - The Hindu CentreSudipan SinghaNo ratings yet
- Sample Paper of Upsc EthicsDocument2 pagesSample Paper of Upsc EthicsKarakorammKaraNo ratings yet
- Prof. Bikash SinhaDocument3 pagesProf. Bikash SinhaSudipan SinghaNo ratings yet
- A Young Indian Diplomat in China in The 1960s and 1970s - K S RanaDocument8 pagesA Young Indian Diplomat in China in The 1960s and 1970s - K S RanaSudipan SinghaNo ratings yet
- Indian Cost Gaurd 2013Document6 pagesIndian Cost Gaurd 2013Aiyappa DevrajNo ratings yet
- Design of Matlab-Based Automatic SpeakerDocument5 pagesDesign of Matlab-Based Automatic SpeakerDoan Van HungNo ratings yet
- Indian Air Force: Notification For MenDocument2 pagesIndian Air Force: Notification For MenTrcStaffNo ratings yet
- Adv EngDocument1 pageAdv EngVivek KumarNo ratings yet
- IITH MTech Biomedical Engineering Program DetailsDocument2 pagesIITH MTech Biomedical Engineering Program DetailsSudipan SinghaNo ratings yet
- Read Different File Names Using Wavread - MATLAB Answers - MATLAB CentralDocument2 pagesRead Different File Names Using Wavread - MATLAB Answers - MATLAB CentralSudipan SinghaNo ratings yet
- Soil PH and Buffer PHDocument3 pagesSoil PH and Buffer PHSudipan SinghaNo ratings yet
- ImageDocument1 pageImagerdisha45No ratings yet
- IAS-to Be or Not To Be - Gopal - Mahajan PDFDocument2 pagesIAS-to Be or Not To Be - Gopal - Mahajan PDFChakriValivetiNo ratings yet
- Aero EngDocument6 pagesAero EngmgskumarNo ratings yet
- Speaker RecognitionDocument14 pagesSpeaker RecognitionblablablouNo ratings yet
- Advertisement No. 21 - 2011Document8 pagesAdvertisement No. 21 - 2011aninfotechNo ratings yet
- Hopper Design PDFDocument31 pagesHopper Design PDFMuhamad Baihakhi ShamsudinNo ratings yet
- A Study of Impurities in Intermediates and 3,4-Methylenedioxymethamphetamine (MDMA) Samples Produced Via Reductive Amination RoutesDocument17 pagesA Study of Impurities in Intermediates and 3,4-Methylenedioxymethamphetamine (MDMA) Samples Produced Via Reductive Amination RoutesandonovkaNo ratings yet
- Mitsubishi CA 310 Brochure PDFDocument4 pagesMitsubishi CA 310 Brochure PDFw1naldoNo ratings yet
- Chapter 1.1-Physical Quantities (Student) PDFDocument19 pagesChapter 1.1-Physical Quantities (Student) PDFdhanisaaNo ratings yet
- Synthesis of p-NitroacetanilideDocument5 pagesSynthesis of p-NitroacetanilideNuratiqah SalamNo ratings yet
- Maxwell v16 L02 Geometry OperationsDocument30 pagesMaxwell v16 L02 Geometry OperationsVahidJam0% (1)
- Problem Set - VIDocument2 pagesProblem Set - VInishanthNo ratings yet
- Diametral Compression TestDocument11 pagesDiametral Compression TestCesar Rodolfo Angulo DelgadoNo ratings yet
- PwayDocument22 pagesPwaykumar sanjay50% (2)
- 4582 SEPIMAX Zen Slides GB July 2013 PDFDocument42 pages4582 SEPIMAX Zen Slides GB July 2013 PDFLinda HamidNo ratings yet
- Untitled0 - 1132Document1 pageUntitled0 - 1132Mark Evan SalutinNo ratings yet
- Introduction To Ozone DepletionDocument2 pagesIntroduction To Ozone DepletionJudelynElentorioNo ratings yet
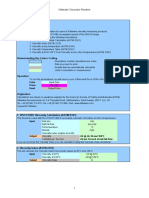
- Understanding The Colour Coding: Kittiwake Viscotube ReadmeDocument15 pagesUnderstanding The Colour Coding: Kittiwake Viscotube ReadmemusaveerNo ratings yet
- UFM interpretation synopsisDocument1 pageUFM interpretation synopsistazjuan1100% (1)
- Detection of Adulteration of Ghee (Clarified Milk Fat) With Palmolein and Sheep Body Fat Using Reichert-Meissl (RM) Value Coupled With Solvent Fractionation TechniqueDocument7 pagesDetection of Adulteration of Ghee (Clarified Milk Fat) With Palmolein and Sheep Body Fat Using Reichert-Meissl (RM) Value Coupled With Solvent Fractionation Techniquekamal gandhiNo ratings yet
- Are Red Flowers Really Red?Document4 pagesAre Red Flowers Really Red?Mikaella CapiralNo ratings yet
- Tolerance Band PDFDocument3 pagesTolerance Band PDFSuresh DatalNo ratings yet
- A I0131e PDFDocument219 pagesA I0131e PDFTëk AñdotNo ratings yet
- Lecture 21 Wire DrawingDocument13 pagesLecture 21 Wire DrawingprasannaNo ratings yet
- Boiling Point, Refractive Index: Identification of A Petroleum HydrocarbonDocument6 pagesBoiling Point, Refractive Index: Identification of A Petroleum HydrocarbonTunde AjiboyeNo ratings yet
- Lesson Plan Science Level 7Document58 pagesLesson Plan Science Level 7aries triwidajati100% (4)
- Rigorous Steady-State Simulation of Acetone Production Using Aspen Hysys®Document9 pagesRigorous Steady-State Simulation of Acetone Production Using Aspen Hysys®eva apriliaNo ratings yet
- Intro Well FoundationDocument23 pagesIntro Well FoundationgoutammandNo ratings yet
- FicoquimicaDocument104 pagesFicoquimicaAnonymous 1mJK5kINo ratings yet
- Co-Crystallization of Honey With SucroseDocument5 pagesCo-Crystallization of Honey With SucroseTTaddictNo ratings yet
- R7410208 Reliability Engineering & Application To Power SystemsDocument2 pagesR7410208 Reliability Engineering & Application To Power SystemssivabharathamurthyNo ratings yet
- Why Use MPC Based Contact For - Bonded - Connections - CAE AssociatesDocument3 pagesWhy Use MPC Based Contact For - Bonded - Connections - CAE AssociatesJA K100% (2)
- HW 5 HTDocument26 pagesHW 5 HTMelkysedec Sierra SandovalNo ratings yet