You might also like
- Símbolos de Valvulas NeumaticasDocument2 pagesSímbolos de Valvulas NeumaticasJuan José CárdenasNo ratings yet
- Mapas BitsDocument1 pageMapas BitsJuan José CárdenasNo ratings yet
- Pdi PDFDocument4 pagesPdi PDFJuan José CárdenasNo ratings yet
- ColorDocument1 pageColorJuan José CárdenasNo ratings yet
- Procesamiento Digital de ImagenesDocument4 pagesProcesamiento Digital de ImagenesJuan José CárdenasNo ratings yet
- ColorDocument1 pageColorJuan José CárdenasNo ratings yet
- ColorDocument1 pageColorJuan José CárdenasNo ratings yet
- Analisis de ImagenesDocument75 pagesAnalisis de ImagenesRandy Olivo BatistaNo ratings yet
- Tabla Trans ZDocument2 pagesTabla Trans ZRo PiekNo ratings yet
- Como Hacer Una Tesis de Carlos SabinoDocument159 pagesComo Hacer Una Tesis de Carlos Sabinovlacktemoc100% (4)
- Plantilla Curriculum VitaeDocument2 pagesPlantilla Curriculum VitaeJuan José Cárdenas100% (1)
- Programacion en Visual C++Document42 pagesProgramacion en Visual C++Ali ArapaNo ratings yet
- Como Hacer Una Tesis de Carlos SabinoDocument159 pagesComo Hacer Una Tesis de Carlos Sabinovlacktemoc100% (4)
- Ingenieria Me CA Tronic ADocument2 pagesIngenieria Me CA Tronic AJuan José CárdenasNo ratings yet
- Tecnicas de Investigacion DocumentalDocument4 pagesTecnicas de Investigacion DocumentalcesarcordovaNo ratings yet
- PDIDocument4 pagesPDIJuan José CárdenasNo ratings yet
- Transparencias C PDFDocument56 pagesTransparencias C PDForialNo ratings yet
- SIPLab MSC - ¿Qué Debe Contener Un Artículo CientíficoDocument3 pagesSIPLab MSC - ¿Qué Debe Contener Un Artículo CientíficoJuan José CárdenasNo ratings yet
- Manual LyX: Con "L" de LaTeXDocument53 pagesManual LyX: Con "L" de LaTeXfjruizruano6872100% (1)
- Labview FiltrosDocument40 pagesLabview FiltrosLCharly007No ratings yet
- WMora Vectores Rectas PlanosDocument45 pagesWMora Vectores Rectas PlanosPatricio Enrique Lespai NaguilNo ratings yet
- Crear Un Ejecutable Con Matlab - My 3D MathDocument5 pagesCrear Un Ejecutable Con Matlab - My 3D MathJuan José CárdenasNo ratings yet
- Tutorial LaTeX 2012Document176 pagesTutorial LaTeX 2012hebersarm100% (1)
- PDIDocument4 pagesPDIJuan José CárdenasNo ratings yet
- Instalar OpenGl en Visual Studio C++ 2010 - My 3D MathDocument5 pagesInstalar OpenGl en Visual Studio C++ 2010 - My 3D MathJuan José CárdenasNo ratings yet
- MatricesDocument11 pagesMatricesVARFDXNo ratings yet
- Abdominales de Acero PDFDocument67 pagesAbdominales de Acero PDFhoracio0903No ratings yet
- PDIDocument4 pagesPDIJuan José CárdenasNo ratings yet
- 2 VectoresMatricesDocument26 pages2 VectoresMatricesJuan José CárdenasNo ratings yet
- Campo Magnético TerrestreDocument11 pagesCampo Magnético TerrestreAlejandro FloresNo ratings yet
- Dinamica - Particula - Ejercicios 2Document2 pagesDinamica - Particula - Ejercicios 2Jk04No ratings yet
- 5 H1-P3-Cap 2 Hidrostática Ejercicios V 09 13 17 PDFDocument36 pages5 H1-P3-Cap 2 Hidrostática Ejercicios V 09 13 17 PDFJhon Quispe AndradeNo ratings yet
- Decs200 CD-6627 PDFDocument141 pagesDecs200 CD-6627 PDFWashington Lorenzo Lama MayorgaNo ratings yet
- Taller1 Movimiento Fis9Document1 pageTaller1 Movimiento Fis9MariaCeciliaPeinado0% (2)
- Clase 06Document54 pagesClase 06Jose Luis Huaytalla OliveraNo ratings yet
- La Dinámica Transversal Del Vehículo Con ESP yDocument19 pagesLa Dinámica Transversal Del Vehículo Con ESP yakcessNo ratings yet
- Preguntas Cuestionario Del Capitulo 13Document8 pagesPreguntas Cuestionario Del Capitulo 13Alvaro Rodrigo Calle SandovalNo ratings yet
- Problemas ResueltosfisicamovondulDocument3 pagesProblemas ResueltosfisicamovondulMauricio Gonzales0% (1)
- 1a Semana Unidad 1-A - Ing. Hidraulica-2023-IIDocument103 pages1a Semana Unidad 1-A - Ing. Hidraulica-2023-IISERGOCO SANNo ratings yet
- Ondas y Radiaciones. Beneficios y RiesgosDocument115 pagesOndas y Radiaciones. Beneficios y Riesgosyaya20092009100% (2)
- Laboratorio No. 3Document38 pagesLaboratorio No. 3Ronald Ermis Marca GuzmanNo ratings yet
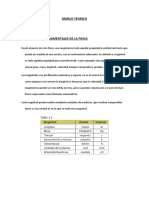
- Marco TeoricoDocument8 pagesMarco TeoricoAngel PagoagaNo ratings yet
- No Se PudoDocument3 pagesNo Se PudoCRISTEL DEL CARMEN MAGAÑA RODRIGUEZNo ratings yet
- PAPER Venturi BorrarDocument7 pagesPAPER Venturi BorrarLukas GalarzaNo ratings yet
- DMG RMG PDFDocument4 pagesDMG RMG PDFJCNo ratings yet
- Estacion 27Document9 pagesEstacion 27Roberto LeyvaNo ratings yet
- Problemas de Caida LibreDocument19 pagesProblemas de Caida LibreHonorato Martínez SaqueNo ratings yet
- 1el Hoy de La Fuerza Por Juan Jose Gonzalez Badillo - CompressDocument32 pages1el Hoy de La Fuerza Por Juan Jose Gonzalez Badillo - CompressAdriian NaviaNo ratings yet
- Leyes Ponderales EstequiometriaDocument23 pagesLeyes Ponderales EstequiometriajuanNo ratings yet
- Panel AtersaDocument2 pagesPanel AtersaAlexander CamposNo ratings yet
- Presentación Máquina Eléctricas SENA 2015Document24 pagesPresentación Máquina Eléctricas SENA 2015Andres VásquezNo ratings yet
- Metrologia Lab 1Document19 pagesMetrologia Lab 1ivan Falcon AlmonacidNo ratings yet
- Matriz de Evaluacion 1S-2020 AlexandraDocument21 pagesMatriz de Evaluacion 1S-2020 AlexandraVILLACIS ORQUERA RENE DAVIDNo ratings yet
- Memoria de Calculo de Instalacion ElectricaDocument3 pagesMemoria de Calculo de Instalacion ElectricaalfredoNo ratings yet
- Marco Teorico-Linea de ConduccionDocument4 pagesMarco Teorico-Linea de ConduccionmanuelNo ratings yet
- Ejercicio 4 ResueltoDocument5 pagesEjercicio 4 ResueltoJair Eduardo Pinto PintoNo ratings yet
- Ejercicos de Carga TrifasicaDocument3 pagesEjercicos de Carga TrifasicaEeindustrialNo ratings yet
- Química 1, Práctica No.3Document17 pagesQuímica 1, Práctica No.3maria alexis de leon archilaNo ratings yet
- Friccion Trabajo Final de Mecanica AplicadaDocument63 pagesFriccion Trabajo Final de Mecanica AplicadaEdson Reyes100% (1)