You might also like
- SUNPACKDocument2 pagesSUNPACKRavi SharmaNo ratings yet
- SHS™ Solar Controller: - High Reliability - Low Cost - Electronic Protections - Tropicalization - Easy To UseDocument2 pagesSHS™ Solar Controller: - High Reliability - Low Cost - Electronic Protections - Tropicalization - Easy To UseRavi SharmaNo ratings yet
- Power System Lab Quiz Set 1Document3 pagesPower System Lab Quiz Set 1Ravi SharmaNo ratings yet
- Name of The Student: ANSWER KEY Roll No.: Set:1 Quiz: Power System Lab-1Document1 pageName of The Student: ANSWER KEY Roll No.: Set:1 Quiz: Power System Lab-1Ravi SharmaNo ratings yet
- Holidays' Homework: Class - VDocument4 pagesHolidays' Homework: Class - VRavi SharmaNo ratings yet
- DC Solar Pumps New-3 PDFDocument3 pagesDC Solar Pumps New-3 PDFRavi SharmaNo ratings yet
- Power System 1 Lab Quiz Set2Document4 pagesPower System 1 Lab Quiz Set2Ravi SharmaNo ratings yet
- Name of The Student: ANSWER KEY Roll No.: Set:1 Quiz: Power System Lab-1Document1 pageName of The Student: ANSWER KEY Roll No.: Set:1 Quiz: Power System Lab-1Ravi SharmaNo ratings yet
- Mid-Term Examination: RE-APPEAR (New Scheme)Document1 pageMid-Term Examination: RE-APPEAR (New Scheme)Ravi SharmaNo ratings yet
- Sequence Circuits Lecture 12Document11 pagesSequence Circuits Lecture 12Semih Cem İlikNo ratings yet
- Admnotices 030320Document1 pageAdmnotices 030320Ravi SharmaNo ratings yet
- Industrialtrainingletter 131230111108 Phpapp01 PDFDocument1 pageIndustrialtrainingletter 131230111108 Phpapp01 PDFRavi SharmaNo ratings yet
- Updated Project Completion Letter FormatDocument1 pageUpdated Project Completion Letter FormatRavi SharmaNo ratings yet
- Smart Sensing Pico GridDocument8 pagesSmart Sensing Pico GridRavi SharmaNo ratings yet
- Live Leak - SBI PO 2016 Mains Model Question PaperDocument38 pagesLive Leak - SBI PO 2016 Mains Model Question PaperTestbook Blog67% (3)
- ps2 SyllabusDocument1 pageps2 SyllabusRavi SharmaNo ratings yet
- Dr. Bhim Singh's View On BLDCDocument1 pageDr. Bhim Singh's View On BLDCRavi SharmaNo ratings yet
- HVDCDocument1 pageHVDCRavi SharmaNo ratings yet
- Final Syllabus-EE-3rd Semester4 - 5 - 6 - 7 - 8Document96 pagesFinal Syllabus-EE-3rd Semester4 - 5 - 6 - 7 - 8Ravi SharmaNo ratings yet
- Intelligent Algorithm For Adaptive Control of Buck and Boost ConverterDocument6 pagesIntelligent Algorithm For Adaptive Control of Buck and Boost ConverterRavi SharmaNo ratings yet
- CW 1Document19 pagesCW 1Ravi SharmaNo ratings yet
- ApplicationDocument1 pageApplicationRavi SharmaNo ratings yet
- Em Ii PDFDocument76 pagesEm Ii PDFRavi SharmaNo ratings yet
- ICEEE2015Document1 pageICEEE2015Ravi SharmaNo ratings yet
- Billbsnl BillDocument1 pageBillbsnl BillRavi SharmaNo ratings yet
- CW 4Document13 pagesCW 4Ravi SharmaNo ratings yet
- Power System SyllabusDocument1 pagePower System SyllabusRavi SharmaNo ratings yet
- Syllabus Nit DelhiDocument53 pagesSyllabus Nit DelhiRavi SharmaNo ratings yet
- List of Nominations Received For This Schedule: Execution of Nofn Utilizing FTTH Tech. (Batch No:1)Document3 pagesList of Nominations Received For This Schedule: Execution of Nofn Utilizing FTTH Tech. (Batch No:1)Ravi SharmaNo ratings yet
- Dynamic Voltage Restorer Against Voltage SagDocument6 pagesDynamic Voltage Restorer Against Voltage SaghusamyesilNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Deloitte - Introduction To TS&A - CloudDocument2 pagesDeloitte - Introduction To TS&A - Cloudsatyam100% (1)
- EPA Section 608 Type I Open Book ManualDocument148 pagesEPA Section 608 Type I Open Book ManualMehdi AbbasNo ratings yet
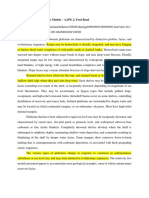
- Carbonate Platform MateriDocument8 pagesCarbonate Platform MateriNisaNo ratings yet
- 04 Task Performance 1Document2 pages04 Task Performance 1mart arvyNo ratings yet
- Types of Intermolecular ForcesDocument34 pagesTypes of Intermolecular ForcesRuschan JaraNo ratings yet
- NHL DB Rulebook ENGLISHDocument6 pagesNHL DB Rulebook ENGLISHAdhika WidyaparagaNo ratings yet
- Purposive Communication Preliminary DiscussionDocument2 pagesPurposive Communication Preliminary DiscussionJohn Mark100% (1)
- Company Registration Procedure Handbook in Cambodia, EnglishDocument124 pagesCompany Registration Procedure Handbook in Cambodia, EnglishThea100% (16)
- Volcano Lesson PlanDocument5 pagesVolcano Lesson Planapi-294963286No ratings yet
- Iit-Jam Mathematics Test: Modern Algebra Time: 60 Minutes Date: 08-10-2017 M.M.: 45Document6 pagesIit-Jam Mathematics Test: Modern Algebra Time: 60 Minutes Date: 08-10-2017 M.M.: 45Lappy TopNo ratings yet
- HC+ Shoring System ScaffoldDocument31 pagesHC+ Shoring System ScaffoldShafiqNo ratings yet
- Context in TranslationDocument23 pagesContext in TranslationRaluca FloreaNo ratings yet
- Reflective Memo 1-PracticumDocument5 pagesReflective Memo 1-Practicumapi-400515862No ratings yet
- New Text DocumentDocument13 pagesNew Text DocumentJitendra Karn RajputNo ratings yet
- Activity Based Costing TestbanksDocument18 pagesActivity Based Costing TestbanksCharlene MinaNo ratings yet
- Coc 1 ExamDocument7 pagesCoc 1 ExamJelo BioNo ratings yet
- GSE v. Dow - AppendixDocument192 pagesGSE v. Dow - AppendixEquality Case FilesNo ratings yet
- Project On Mahindra BoleroDocument35 pagesProject On Mahindra BoleroViPul75% (8)
- Category (7) - Installation and Maintenance of Instrumentation and Control SystemsDocument3 pagesCategory (7) - Installation and Maintenance of Instrumentation and Control Systemstafseerahmed86No ratings yet
- Volvo Catalog Part2Document360 pagesVolvo Catalog Part2Denis Konovalov71% (7)
- p7000 Series PDFDocument592 pagesp7000 Series PDFtony445No ratings yet
- IGCSE 0408 Unseen Poem QuestionsDocument5 pagesIGCSE 0408 Unseen Poem QuestionsMenon HariNo ratings yet
- DLL in Health 7 3rd QuarterDocument2 pagesDLL in Health 7 3rd QuarterJuna Lyn Hermida ArellonNo ratings yet
- Partnership LiquidationDocument46 pagesPartnership LiquidationSewale Abate79% (19)
- Medical Equipment Quality Assurance For Healthcare FacilitiesDocument5 pagesMedical Equipment Quality Assurance For Healthcare FacilitiesJorge LopezNo ratings yet
- 2022 NEDA Annual Report Pre PubDocument68 pages2022 NEDA Annual Report Pre PubfrancessantiagoNo ratings yet
- Quiz 2 I - Prefix and Suffix TestDocument10 pagesQuiz 2 I - Prefix and Suffix Testguait9No ratings yet
- Edtpa Lesson 3Document3 pagesEdtpa Lesson 3api-299319227No ratings yet
- Catch Up RPHDocument6 pagesCatch Up RPHபிரதீபன் இராதேNo ratings yet
- MikoritkDocument6 pagesMikoritkChris Jonathan Showip RouteNo ratings yet