Professional Documents
Culture Documents
Aero Dina Mica
Uploaded by
Luis DavilaCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Aero Dina Mica
Uploaded by
Luis DavilaCopyright:
Available Formats
Tecnologa Aeroespacial (TAE)
2008 2011
PROBLEMAS
RESUELTOS DE
TECNOLOGA
AEROESPACIAL (TAE)
Jose I. Rojas & Xavier Prats
Escola dEnginyeria de Telecomuniaci y Aeroespacial de Castelldefels
(EETAC)
Universitat Politcnica de Catalunya (UPC BarcelonaTech)
Tecnologa Aeroespacial
2
PROBLEMAS RESUELTOS TAE
JOSE I. ROJAS Y XAVIER PRATS
1.-
a) Presin dinmica y presin total en la garganta del tubo (seccin 2):
Presin dinmica en la garganta del tubo es: 25 . 1531
2
1
2
2 2
= = V q Pa
Presin total en la garganta del tubo es: ( ) ( ) 25 . 72906
2 2
= + = q p p
S T
Pa
b) Presin dinmica y presin total en la entrada del tubo (seccin 1):
Presin dinmica en la entrada del tubo es: 245
2
1
2
1 1
= = V q Pa
Presin total en la entrada del tubo es: ( ) ( ) 25 . 72906
2 1
= =
T T
p p Pa
c) Presin esttica en la entrada del tubo:
Presin esttica en la entrada del tubo es: ( ) ( ) 25 . 72661
1 1
= = q p p
T S
Pa
2.-
Partiendo de la ecuacin de continuidad o de conservacin de la masa y suponiendo
rgimen incompresible se halla la expresin para la velocidad en la garganta:
cte AV =
2
2
2 1
2
1
V R V R t t =
2
2
1
1 2
|
|
.
|
\
|
=
R
R
V V
Partiendo de la ecuacin de Bernoulli y la ecuacin anterior se halla la expresin para la
presin esttica en la garganta:
cte V p = +
2
2
1
2
2 2
2
1 1
2
1
2
1
V p V p + = +
4
2
1
2
1
2
1 1
2
2
2
1 1 2
2
1
2
1
2
1
2
1
|
|
.
|
\
|
+ = + =
R
R
V V p V V p p
Que se puede reescribir de dos formas:
(
(
|
|
.
|
\
|
+ =
4
2
1
2
1 1 2
1
2
1
R
R
V p p
4
2
1
2
1 2
2
1
|
|
.
|
\
|
=
R
R
V p p
T
Tecnologa Aeroespacial
3
3.-
a) ngulo de ataque que proporciona sustentacin nula:
0
2
1
2
= =
L
SC V L 0 2 . 0 4 . 0 = + = o
L
C 2 = o
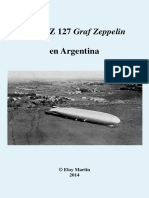
b) Representacin grfica de la caracterstica de este perfil:
4.-
a) Velocidad de prdida:
11 =
S
o 6 . 2 2 . 0 4 . 0 = + =
S MAX L
C o
W SC V L
L
= =
2
2
1
42
2
= =
MAX L
S
SC
W
V
m/s
Tecnologa Aeroespacial
4
b) Velocidad para vuelo horizontal con ngulo de ataque nulo:
0 = o 4 . 0
) 0 (
=
= o L
C
W SC V L
L
= =
2
2
1
107
2
) 0 (
) 0 (
= =
=
=
o
o
L
SC
W
V m/s
c) Si el avin aumenta el ngulo de ataque manteniendo la velocidad:
Aumenta el coeficiente de sustentacin, lo que se traduce a su vez en un aumento de la
sustentacin que pasa a ser mayor que el peso del avin (el factor de carga aumenta y
pasa a ser mayor que la unidad). Se produce por tanto un desequilibrio de las fuerzas
que actan sobre el avin y la consecuencia de esto es que aparece una aceleracin
hacia arriba, el avin comienza a subir.
d) ngulo de ataque:
Si se plantean las fuerzas que actan sobre el avin en el eje vertical (suponiendo que
los ngulos son pequeos):
ma F =
ma W L = 135000 = + = ma W L N
L
SC V L
2
2
1
= 602 . 0
2
2
= =
S V
L
C
L
01 . 1
2 . 0
4 . 0
=
=
L
C
o
e) Factor de carga de esta maniobra:
51 . 1 1 1 = + = + =
+
= =
g
a
W
ma
W
ma W
W
L
n [g]
f) Velocidad mnima a la que se podra hacer esa maniobra:
MAX L MIN
SC V L
2
2
1
135000 = = 5 . 51 =
MIN
V m/s
g) Velocidad para vuelo horizontal con ngulo de ataque nulo a 30000 ft:
2556 . 4
0
) 0000226 . 0 1 ( h = 458 . 0
30000
= kg/m
3
0 = o 4 . 0
) 0 (
=
= o L
C
W SC V L
L
= =
2
2
1
173
2
) 0 ( 30000
30000
) 0 (
= =
=
=
o
o
L
SC
W
V m/s
h) Velocidad de prdida a 30000 ft:
Con el aumento de la altitud de vuelo la densidad del aire disminuye con respecto a su
valor en SL, con lo que la velocidad de entrada en prdida aumenta. Esta variacin es
perjudicial ya que la posibilidad de entrar en prdida se acenta.
11 =
S
o 6 . 2 2 . 0 4 . 0 = + =
S MAX L
C o
W SC V L
L
= =
2
2
1
68
2
30000
= =
MAX L
S
SC
W
V
m/s
Tecnologa Aeroespacial
5
5.-
a) ngulo mximo de inclinacin:
Con el aumento del ngulo de inclinacin, la componente de la fuerza de sustentacin
que compensa al peso disminuye. Para que esa componente siga siendo capaz de
compensar el peso, debe aumentar el valor de la sustentacin, que slo se logra
aumentando el ngulo de ataque, si se supone que el resto de parmetros no cambia (en
particular la superficie alar, la velocidad de vuelo y la densidad del aire).
El ngulo mximo de inclinacin se produce para el caso en que, bajo las condiciones
dadas, tenemos un valor de sustentacin mxima, que se corresponde a vuelo con el
ngulo de entrada en prdida. Si en esa condicin se aumenta el ngulo de inclinacin,
como no es posible incrementar la sustentacin (dado que no son alcanzables ngulos
de ataque mayores porque se producira la entrada en prdida), la componente
correspondiente es incapaz ya de compensar el peso y no es posible el vuelo en el plano
horizontal.
11 =
S
o 6 . 2 2 . 0 4 . 0 = + =
S MAX L
C o
183456
2
1
2
= =
MAX L MAX
SC V L N
De las ecuaciones de viraje en el plano horizontal:
W L = | cos W L
MAX MAX
= | cos 62 . 60 =
MAX
|
b) Avin a 30 000 pies de altitud:
No es posible el vuelo horizontal rectilneo uniforme a 30 000 pies con una velocidad de
vuelo de 120 kt. El ngulo de ataque necesario para lograrlo es mayor que el ngulo de
entrada en prdida.
6.-
ngulo de ataque para vuelo invertido:
Planteando el equilibrio de fuerzas sobre el avin en el eje vertical, necesario para
mantener un vuelo en el plano horizontal, y con el criterio de signos convencional:
0 = +W L 90000 = L N
L
SC V L
2
2
1
= 92 . 0 =
L
C
o 2 . 0 4 . 0 + =
L
C 6 . 6 = o
7.-
Demostracin de la expresin de la eficiencia aerodinmica mxima:
) (
2
0
L
L D
L
D
L
C E
kC C
C
C
C
D
L
E =
+
= = =
Suponiendo que el coeficiente de resistencia parsita y el parmetro k son constantes, la
eficiencia aerodinmica es una funcin que slo depende del coeficiente de sustentacin.
Derivando con respecto a este coeficiente e igualando a cero se puede hallar el mximo
de la eficiencia aerodinmica y el coeficiente de sustentacin al que se produce (que se
llama coeficiente de sustentacin ptimo).
Tecnologa Aeroespacial
6
( )
0
2
2
2
0
2 2
0
2
0
=
+
+
=
|
|
.
|
\
|
+
=
L D
L L D
L
L D
L
L kC C
kC kC C
dC
kC C
C
d
dC
dE
El denominador es siempre mayor que cero porque el producto de k y el coeficiente de
sustentacin al cuadrado es siempre mayor o igual que cero y el coeficiente de
resistencia parasita es siempre mayor que cero. Luego se puede pasar multiplicando al
otro lado de la igualdad:
0 2
2 2
0
= +
L L D
kC kC C ( )
k
C
D
OPT
0
L
MAX E L
C C = =
0
2
0
2
1
) (
D OPT L D
OPT L
OPT L L MAX
kC kC C
C
C C E E =
+
= = =
8.-
a) Representacin grfica de la curva:
b) Valor de la eficiencia aerodinmica mxima:
01 . 0 ; 01 . 0
0
= =
D
C k 50
2
1
0
= =
D
MAX
kC
E
Tecnologa Aeroespacial
7
9.-
Resistencia mnima del avin en vuelo horizontal:
Suponiendo que el peso es constante, el vuelo en el plano horizontal con mnima
resistencia aerodinmica est asociado a vuelo con mxima eficiencia aerodinmica.
Esto se demuestra a continuacin:
W L =
D
W
D
L
E = =
MIN MAX
MAX
D
W
D
W
E =
|
.
|
\
|
= 5000 = =
MAX
MIN
E
W
D N
10.-
Resistencia inducida i resistencia parsita del avin:
Para volar en condiciones de mximo planeo (o ngulo de descenso mnimo), se debe
volar con eficiencia aerodinmica mxima como se demuestra a continuacin, partiendo
de las ecuaciones del vuelo de descenso y considerando la hiptesis habitual de ngulo
de descenso pequeo:
L W W = ~ cos
D W W = ~ sin
E L
D
W
D 1
= = =
MAX
MIN
E
1
=
A su vez, de forma anloga a lo visto en el problema 9, en el vuelo de descenso con
ngulos pequeos, la condicin de mnima resistencia aerodinmica est asociada al
vuelo con mxima eficiencia aerodinmica:
L W W = ~ cos
D
W
D
W
D
L
E ~ = =
cos
MIN
MAX
D
W
E =
5000 = =
MAX
MIN
E
W
D N
Para hallar la resistencia parsita y la inducida partiendo de este dato falta recurrir a las
propiedades del vuelo con eficiencia aerodinmica mxima (vistas en clases de Teora):
k
C
D
OPT
0
L
C = ( )
0
2
D OPT L
MAX E Di
C C k C = =
Lo que significa que, en la condicin de vuelo con eficiencia aerodinmica mxima, la
resistencia parsita y la inducida son idnticas:
i P MIN P i
D D D D D 2 2 = = = 2500
2
= = =
MIN
i P
D
D D N
11.-
a) Coeficiente de resistencia aerodinmica para ngulo de ataque crtico:
( ) 6 . 2 2 . 0 4 . 0 = + = =
S MAX L S L
C C o o
( ) ( ) 28 . 0 04 . 0 01 . 0
2
= + =
S L S D
C C o o
Tecnologa Aeroespacial
8
b) Coeficiente de resistencia aerodinmica para ngulo de ataque nulo:
( ) 4 . 0 0
0
= = =
L L
C C o
( ) ( ) 0164 . 0 0 04 . 0 01 . 0 0
2
= = + = = o o
L D
C C
c) Valor de la eficiencia aerodinmica mxima:
25
2
1
0
= =
D
MAX
kC
E
d) Valor de los coeficientes de sustentacin y resistencia en condiciones de
eficiencia aerodinmica mxima:
( ) 5 . 0
0
= = =
k
C
C C
D
OPT L
MAX E L
( ) 02 . 0 2
0
2
0
0
2
0
= =
|
|
.
|
\
|
+ = + =
D
D
D OPT L D
MAX E D
C
k
C
k C kC C C
e) ngulo de ataque para vuelo con eficiencia aerodinmica mxima:
OPT OPT L
C o 2 . 0 4 . 0 + = 5 . 0
2 . 0
4 . 0
=
=
OPT L
OPT
C
o
f) Representacin grfica de la curva polar:
Tecnologa Aeroespacial
9
12.-
Velocidad de mximo planeo a nivel del mar:
Como se ha demostrado en el problema 10, para volar en condiciones de mximo planeo
(o ngulo de descenso mnimo), se debe volar con eficiencia aerodinmica mxima. A su
vez, como ha quedado demostrado en el problema 9, el vuelo en el plano horizontal con
mxima eficiencia aerodinmica est asociado al vuelo con mnima resistencia. De todo
ello resulta que la velocidad para mximo planeo es la velocidad de mnima resistencia:
83 . 95
2 2
4
0
= = =
D OPT L
MIN D
C
k
S
W
SC
W
V
m/s
13.-
ngulo de ataque para mximo planeo:
( ) ( )
( )
) (
2
0
o
o
o o
E
kC C
C
C
C
D
L
E
L D
L
D
L
=
+
= = =
( ) o o
o L L L
C C C + =
0
Suponiendo que el coeficiente de resistencia parsita y el parmetro k son constantes, la
eficiencia aerodinmica es una funcin que depende del coeficiente de sustentacin. Se
conoce una relacin entre ste y el ngulo de ataque, luego se puede encontrar una
expresin que proporciona la eficiencia aerodinmica en funcin nicamente de la
variable ngulo de ataque, suponiendo que la ordenada en el origen y la pendiente de la
curva caracterstica del perfil son constantes.
Derivando la eficiencia aerodinmica con respecto al ngulo de ataque e igualando a
cero se halla el ngulo de ataque que proporciona mxima eficiencia aerodinmica y el
valor de sta.
( )
( )
0
2
2
2
0
2
0 0
2
0
=
+
+
=
+
|
|
.
|
\
|
+
= =
o
o
o
o
o o
L
L D
L L D L L
L
L D
L
L
L
C
kC C
kC kC C
d
C C d
dC
kC C
C
d
d
dC
dC
dE
d
dE
El denominador y la pendiente de la curva caracterstica del perfil son siempre mayores
que cero. El denominador es siempre mayor que cero porque el producto de k y el
coeficiente de sustentacin al cuadrado es siempre mayor o igual que cero y el
coeficiente de resistencia parsita es siempre mayor que cero. Luego se puede pasar
multiplicando al otro lado de la igualdad y la pendiente de la curva caracterstica:
0 2
2
0
= +
L L D
kC kC C ( )
k
C
D
OPT
0
L
MAX E L
C C = =
k
C
C C C
D
OPT L L OPT L
0
0
= + = o
o
|
|
.
|
\
|
=
0
0
1
L
D
L
OPT
C
k
C
C
o
o
14.-
ngulo de ataque ptimo para cambio de configuracin de flaps:
El ngulo de ataque ptimo para cambio de configuracin de flaps est relacionado con
el punto de interseccin de las curvas polares consideradas.
Tecnologa Aeroespacial
10
La interseccin se expresa matemticamente igualando los coeficientes de sustentacin
o de resistencia de las dos configuraciones consideradas:
Interseccin de curvas polares para configuracin limpia y flaps deflectados 10:
10
C C
D
CLEAN
D
=
2 2
028 . 0 06 . 0 111 . 0 04 . 0
L L
C C + = + 49 . 0 =
L
C
Paso de configuracin limpia a flaps deflectados 10:
49 . 0 =
L
C o 3 . 0 3 . 0 + =
L
C 63 . 0
3 . 0
3 . 0
=
=
L
C
o
Paso de flaps deflectados 10 a configuracin limpia:
49 . 0 =
L
C o 3 . 0 4 . 0 + =
L
C 30 . 0
3 . 0
4 . 0
=
=
L
C
o
Interseccin de curvas polares para flaps deflectados 10 y flaps deflectados 20:
20 10
C C
D D
=
2 2
01 . 0 1 . 0 028 . 0 06 . 0
L L
C C + = + 49 . 1 =
L
C
Paso de flaps deflectados 10 a flaps deflectados 20:
49 . 1 =
L
C o 3 . 0 4 . 0 + =
L
C 63 . 3
3 . 0
4 . 0
=
=
L
C
o
Tecnologa Aeroespacial
11
Paso de flaps deflectados 10 a configuracin limpia:
49 . 1 =
L
C o 3 . 0 7 . 0 + =
L
C 63 . 2
3 . 0
7 . 0
=
=
L
C
o
15.-
a) Velocidades ptimas de cambio de configuracin de flaps:
Paso de configuracin limpia a flaps deflectados 10 o viceversa:
49 . 0 =
L
C W SC V L
L
= =
2
2
1
56 . 97
2
= =
L
SC
W
V
m/s
Paso de flaps deflectados 10 a flaps deflectados 20 o viceversa:
49 . 1 =
L
C W SC V L
L
= =
2
2
1
95 . 55
2
= =
L
SC
W
V
m/s
b) Incremento de resistencia si el cambio de 10 a 20 se hace a 130 kt:
W SC V L
L
= =
2
2
1
104 . 1
2
2
= =
SV
W
C
L
Resistencia con flaps a 10:
094 . 0 028 . 0 06 . 0
2
= + =
L D
C C 4 . 8525
2
1
2
10
= =
D
SC V D N
Resistencia con flaps a 20:
112 . 0 01 . 0 1 . 0
2
= + =
L D
C C 2 . 10144
2
1
2
20
= =
D
SC V D N
8 . 1618
10 20
= = A D D D N
c) Incremento porcentual:
99 . 18 [%]
10
10 20
=
= A
D
D D
D %
16.-
Demostracin para la expresin de sustentacin creada por el plano de cola:
a) Correspondencia entre dispositivos y efectos:
El dispositivo que produce un aumento de la ordenada en el origen de la curva de
sustentacin, o lo que es lo mismo, un aumento de la sustentacin para ngulo de ataque
nulo, es el flap, a travs del aumento que origina en la curvatura del perfil.
El dispositivo que produce un aumento del ngulo de ataque de entrada en prdida o
ngulo crtico es el slot, gracias al control que ejerce sobre la capa lmite en el extrads,
a la que comunica energa, retrasando as la entrada en prdida.
Tecnologa Aeroespacial
12
b) Velocidad de prdida para cada tipo de combinacin:
W SC V L
L
= =
2
2
1
MAX L
S
SC
W
V
2
=
Configuracin limpia:
2 . 5 5 . 0 2 . 0 = + =
S MAX L
C o 7 . 30
2
= =
MAX L
S
SC
W
V
m/s
Configuracin con flap desplegado:
5 . 5 5 . 0 5 . 0 = + =
S MAX L
C o 8 . 29
2
= =
MAX L
S
SC
W
V
m/s
Configuracin con slot habilitado:
7 . 6 5 . 0 2 . 0 = + =
S MAX L
C o 0 . 27
2
= =
MAX L
S
SC
W
V
m/s
Configuracin con flap desplegado y slot habilitado:
0 . 7 5 . 0 5 . 0 = + =
S MAX L
C o 5 . 26
2
= =
MAX L
S
SC
W
V
m/s
17.-
Demostracin para la expresin de sustentacin creada por el plano de cola:
Al contrario de lo que dice el enunciado, se supone que los puntos de aplicacin de la
sustentacin del ala y de la sustentacin del plano de cola son los centros de presin del
ala y del plano de cola respectivamente. A modo de recordatorio cabe destacar que el
centro de presin (cp) es aquel punto en el que el sistema de presiones actuando sobre
la superficie en cuestin (ala y plano de cola) se reduce nicamente a una fuerza
resultante (el momento resultante del sistema de presiones es nulo en el cp). Las
distancias definidas en el enunciado son las correspondientes a los cp y no a los centros
aerodinmicos (ca).
CAMINO 1: El largo:
La condicin de vuelo horizontal rectilneo uniforme impone que la resultante del sistema
de fuerzas que acta sobre el avin es nula. De los equilibrios de fuerza segn los tres
ejes se utiliza en este caso la ecuacin correspondiente al eje perpendicular al plano
horizontal, porque es la que proporciona informacin interesante:
= 0 F W L L = A +
La condicin de equilibrio impone que el momento resultante, respecto al centro de
gravedad por ejemplo, del sistema de fuerzas que acta sobre el avin es nulo. De los
equilibrios de momentos segn los tres ejes se utiliza en este caso la ecuacin
correspondiente al equilibrio de momentos segn el eje perpendicular al plano de
simetra del avin, porque es la que proporciona informacin interesante:
= 0
CG
M 0 ) ( = + A +
PC CM CM
d d L Ld
Usando la primera ecuacin:
0 ) 1 ( = A + = + A +
CM
PC
CM
PC
d
d
L W
d
d
L L
PC
CM
d
d
W L = A
Tecnologa Aeroespacial
13
CAMINO 2: El corto:
En lugar de tomar momentos respecto al centro de gravedad, se evalan respecto al
centro de presiones del ala (que se supone que es el punto de aplicacin de la
sustentacin generada por el ala). La condicin de equilibrio impone de nuevo que el
momento resultante, respecto al centro de presiones del ala, del sistema de fuerzas que
acta sobre el avin es nulo. De los equilibrios de momentos segn los tres ejes se utiliza
en este caso la ecuacin correspondiente al equilibrio de momentos segn el eje
perpendicular al plano de simetra del avin (eje y
b
), porque es la que proporciona
informacin interesante:
= 0
CP
M 0 = + A
CM PC
Wd Ld
PC
CM
d
d
W L = A
18.-
STATEMENT OF WORK:
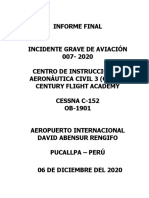
Dado el conducto convergente de seccin circular, cuya vista en alzado se puede
apreciar en la figura (this could be for instance the sketch of a vectorial nozzle), y
las siguientes hiptesis y datos:
- Flujo estacionario y uniforme
- No existe disipacin de energa por efectos viscosos ni conduccin de calor
- Velocidad del sonido: 340 m/s
- Se puede suponer que el flujo es incompresible
1
en todo momento
Se pide:
a) Calcular: velocidad en la seccin de salida del conducto
rea de la seccin transversal del conducto en funcin de x
velocidad del flujo en cada seccin en funcin de x
velocidad en la seccin a 2.5 m de la seccin de entrada
b) Sabiendo que las condiciones del flujo a la entrada son las de la atmsfera ISA
a nivel del mar. Calcular:
presin total en la seccin de entrada del conducto
presin esttica en la seccin de salida del conducto
presin esttica en funcin de x
Tecnologa Aeroespacial
14
presin esttica en la seccin a 2.5 m de la seccin de entrada
Tecnologa Aeroespacial
15
RESOLUTION:
a)
Acudiendo a la ecuacin de continuidad y sabiendo que la densidad se puede considerar
constante:
cte AV = cte AV =
O O I I
V A V A = 135 15
9
= = =
t
t
I
O
I
O
V
A
A
V m/s
Para conocer el rea de la seccin transversal del conducto en funcin de x es necesario
conocer el radio en funcin de x. Las ecuaciones de las rectas correspondientes a los
puntos ms altos y a los ms bajos de las secciones son, respectivamente:
3
5
2
+ = x y [m] 3
5
2
= x y [m]
Cualquiera de las dos proporciona el valor del radio de la seccin en funcin de x:
2
) 3
5
2
( ) ( ) ( = = x x R x A t t [m
2
]
Acudiendo de nuevo a la ecuacin de continuidad para fluido incompresible:
2
) 3
5
2
(
135
) (
) (
= =
x
V
x A
A
x V
I
I
[m/s] 75 . 33
) 3
2
5
5
2
(
135
)
2
5
(
2
=
= V m/s
b)
Como el flujo es estacionario, el rgimen es incompresible y no existe disipacin de
energa por efectos viscosos ni conduccin de calor (esta ltima condicin es equivalente
a considerar que el fluido es ideal), tiene validez la ecuacin de Bernoulli para fluidos
incompresibles:
T S
p cte V p = = +
2
2
1
101463
2
1
2
0
= + =
I I S I T
V p p Pa
90300
2
1
2
0
= =
O I T O S
V p p Pa
I T S
p x V x p = +
2
0
) (
2
1
) (
2
0
) (
2
1
) ( x V p x p
I T S
=
4
) 3
5
2
(
8125 . 11162
101463 ) (
=
x
x p
S
[Pa]
100765
) 3
2
5
5
2
(
8125 . 11162
101463 )
2
5
(
4
=
=
S
p Pa
Tecnologa Aeroespacial
16
19.-
STATEMENT OF WORK:
Un avin provisto de motor turborreactor realiza un vuelo horizontal:
- 10000 = M kg
- 40 = S m
2
- o 3 . 0 2 . 0 + =
L
C ; 11 =
S
o
- 0075 . 0
0
=
D
C
- 6 . 19 = A
- 85 . 0 = e
NOTA: Suponer siempre vuelo a nivel del mar, 10 ~ g m/s
2
y 2 Kt 1 ~ m/s.
a) Calcular:
MIN
D ,
MIN D
V , velocidad de mximo alcance y de mxima autonoma
b) Calcular el mximo tiempo en vuelo del avin (mxima autonoma) suponiendo
que el piloto mantiene constantes a lo largo del vuelo (horizontal y rectilneo) la
velocidad y el empuje del motor, con los valores correspondientes para la
mxima autonoma
- 3000 =
TOTAL F
M kg
- 2 =
e
c N/hN
c) Calcular el ngulo de descenso mnimo y la distancia mxima que recorrera
(alcance mximo) este avin si apagara el motor y descendiera planeando
desde una altura de 1000m
d) Calcular la distancia mxima que el avin puede recorrer (alcance mximo)
suponiendo que el piloto mantiene constantes a lo largo del vuelo (horizontal y
rectilneo) la velocidad y el empuje del motor, con los valores correspondientes
al alcance mximo. Los datos son los mismos que para el apartado b)
- 3000 =
TOTAL F
M kg
- 2 =
e
c N/hN
RESOLUTION:
a)
De la condicin de vuelo horizontal: D T =
100000 = = = Mg W L N
CAMINO 1:
El valor de la eficiencia aerodinmica mxima lo podemos calcular porque depende
nicamente de datos de los que ya disponemos.
019 . 0
1
= =
Ae
k
t
88 . 41
2
1
0
= =
k C
E
D
MAX
Nos interesa calcularlo porque en el vuelo horizontal la resistencia mnima se produce
cuando existe eficiencia aerodinmica mxima (que a su vez se produce cuando se vuela
con coeficiente de sustentacin ptimo).
MIN
MAX
D
W
E = 77 . 2387 = =
MAX
MIN
E
W
D N
59 . 80
2
4
0
= =
D
MIN D
C
k
S
W
V
m/s
Tecnologa Aeroespacial
17
CAMINO 2:
El valor del coeficiente de sustentacin ptimo lo podemos calcular porque depende
nicamente de datos de los que ya disponemos.
019 . 0
1
= =
Ae
k
t
628 . 0
0
= =
k
C
C
D
LOPT
Nos interesa calcularlo porque en el vuelo horizontal la resistencia mnima se produce
cuando se vuela con coeficiente de sustentacin ptimo.
2
0 L D D
kC C C + = 015 . 0 2
0
2
0
= = + =
D OPT L D
D
D
C kC C C
MIN
59 . 80
2 2
4
0
= = =
OPT L D
MIN D
SC
W
C
k
S
W
V
m/s
D
SC V D
2
2
1
= 77 . 2387
2
1
2
= =
MIN
D
D MIN D MIN
C S V D N
En un turborreactor las velocidades demandadas son las siguientes:
59 . 80 = =
MIN D
AUT
MAX V V m/s
06 . 106 3
4
= =
MIN D
ALC
MAX V V m/s
b)
Por un lado, el consumo de combustible en un turborreactor es proporcional al empuje
dado por el motor, y la constante de proporcionalidad es el consumo especfico.
T c c
e
=
Por otro lado, el empuje es igual a la resistencia (por ser vuelo horizontal) y, como se ha
visto en el apartado a) y en la teora del tema 3, para un turborreactor la mxima
autonoma se da volando con mnima resistencia. De ah que el empuje de mxima
autonoma en vuelo horizontal sea igual a la resistencia mnima:
54 . 4775 = = =
MIN e
AUT
MAX
e
AUT
MAX D c T c c N/h
Se vio tambin en teora la siguiente relacin que debemos integrar:
dt
dW
c
F
=
F
dW cdt =
} }
=
F
W
F
t
dW cdt
0 0
Integrando a ambos lados y sabiendo que c es constante a lo largo del vuelo (por ser
constantes el consumo especfico y el empuje segn dice el enunciado):
F
W ct =
Si queremos calcular el mximo tiempo de vuelo tendremos que entrar en esta ecuacin
con el peso total de combustible porque se habr consumido todo:
38 . 6 = =
c
W
t
TOTAL F
AUT
MAX h
c)
El ngulo de descenso mnimo se produce para el vuelo con eficiencia aerodinmica
mxima y vale justamente su inverso:
0239 . 0
1
= =
MAX
MIN
E
rad 368 . 1 =
Tecnologa Aeroespacial
18
41880 = = = h E
h
d
MAX
MIN
MAX
m
d)
Nuevamente constamos con la siguiente ecuacin:
T c c
e
=
Por otro lado, el empuje es igual a la resistencia (por ser vuelo horizontal) y, como se ha
visto en la teora del tema 3, toma la expresin siguiente:
S V
W
k SC V SkC V SC V SC V D T
D L D D
2
2
0
2 2 2
0
2 2
2
2
1
2
1
2
1
2
1
+ = + = = =
Se puede resolver la expresin anterior entrando directamente con la velocidad de
mximo alcance para obtener el empuje de mximo alcance. Si se hace paso a paso,
primero se calcula el coeficiente de sustentacin para mantener el vuelo horizontal con la
velocidad de mximo alcance:
L
SC V W L
2
2
1
= = 363 . 0
2
2
= =
S V
W
C
ALC
MAX
ALC
MAX
L
Luego se calcula el correspondiente coeficiente de resistencia y con l el empuje:
2
0 L D D
kC C C + = 01 . 0
2
0
= + =
ALC
MAX
L D
ALC
MAX
D
C k C C
9 . 2755
2
1
2
= = =
ALC
MAX
D
ALC
MAX
ALC
MAX
ALC
MAX C S V D T N
8 . 5511 = =
ALC
MAX
e
ALC
MAX T c c N/h
Se vio tambin en teora la siguiente relacin que debemos integrar:
c
V
dt
dW
dt
dx
dW
dx
F
F
= =
F
dW
c
V
dx =
} }
=
F
W
F
x
dW
c
V
dx
0 0
Integrando a ambos lados y sabiendo que c y V son constantes a lo largo del vuelo (por
ser constantes el consumo especfico, el empuje y la velocidad segn dice el enunciado):
F
W
c
V
x =
Si queremos calcular el mximo alcance tendremos que entrar en esta ecuacin con el
peso total de combustible porque se habr consumido todo, y con los valores de c y V
que proporcionan mximo alcance:
2078 = =
TOTAL F
ALC
MAX
ALC
MAX
ALC
MAX W
c
V
x km
Tecnologa Aeroespacial
19
20.-
STATEMENT OF WORK:
Un avin provisto de motor alternativo y hlice realiza un vuelo horizontal:
- 13000 = M kg
- 10 . 59 = S m
2
- 25 . 0
0
=
L
C ; 28 . 0 =
o L
C ; 12 =
S
o
- 29 . 0 =
CRUCERO
e
c Kg-f/hkW
- 022 . 0
0
=
D
C
- 035 . 0 = k
- 85 . 0 =
P
q
- 81 . 25 = b m
NOTA: Suponer siempre vuelo a nivel del mar, 10 ~ g m/s
2
y 2 Kt 1 ~ m/s.
a) Calcular el coeficiente de sustentacin y el coeficiente de resistencia para tener
eficiencia aerodinmica mxima, el valor de E
MAX
y el ngulo de ataque al que
debe volar el piloto para conseguir E
MAX
b) Calcular:
MIN
D ,
MIN D
V , velocidad de mximo alcance y de mxima autonoma
c) Calcular la potencia necesaria para el vuelo de mximo alcance y la potencia
que debe proporcionar el motor en este caso
d) Calcular la distancia mxima que el avin puede recorrer (alcance mximo)
suponiendo que el piloto mantiene constantes a lo largo del vuelo (horizontal y
rectilneo) la velocidad y la potencia del motor (o potencia al eje/rbol-motor),
con los valores correspondientes al alcance mximo
- 4000 =
TOTAL F
M kg
- 29 . 0 =
CRUCERO
e
c kg-f/hkW
RESOLUTION:
a)
793 . 0
0
= =
k
C
C
D
OPT L
044 . 0 2
0
2
0
= = + =
D OPT L D
MAX E
D
C kC C C
18
2
1
0
= = =
MAX E
D
OPT L
D
MAX
C
C
k C
E
o
o L L L
C C C + =
0
94 . 1
0
=
=
o
o
L
L OPT L
OPT
C
C C
b)
3 . 67
2 2
4
0
= = =
OPT L D
MIN D
SC
W
C
k
S
W
V
m/s
CAMINO 1:
MIN
MAX
D
W
E = 22 . 7222 = =
MAX
MIN
E
W
D N
CAMINO 2:
7214
2
1
2
1
2 2
= = =
MAX E
D MIN D
D
D MIN D MIN
C S V C S V D
MIN
N
Tecnologa Aeroespacial
20
En un avin provisto de motor alternativo y hlice las velocidades demandadas son las
siguientes:
14 . 51
3
1
4
= =
MIN D
AUT
MAX V V m/s
3 . 67 = =
MIN D
ALC
MAX V V m/s
c)
DV P
R
= 5 . 485 = =
MIN D MIN
ALC
MAX
R
V D P kW
Por ser vuelo horizontal, la potencia requerida es igual a la disponible:
S P A R
P P P q = = 2 . 571 = =
P
A
S
P
P
q
kW
d)
Contamos con la siguiente ecuacin por tratarse de un avin con motor alternativo:
P c c
e
=
2 . 571 =
ALC
MAX
S
P kW
64 . 165 = =
ALC
MAX
S e
ALC
MAX P c c kg-f/h
El kilogramo-fuerza (kg-f) es una unidad de medida de fuerzas (como el Newton N)
empleada habitualmente en el sector de la ingeniera (especialmente en el mundo
anglosajn). Su conversin a unidades N es la siguiente:
1 kg-f g = N
En nuestro caso empleamos 10 ~ g , luego queda:
1 kg-f 10 ~ N 4 . 1656 =
ALC
MAX c N/h
Se vio tambin en teora la siguiente relacin que debemos integrar:
c
V
dt
dW
dt
dx
dW
dx
F
F
= =
F
dW
c
V
dx =
} }
=
F
W
F
x
dW
c
V
dx
0 0
Integrando a ambos lados y sabiendo que c y V son constantes a lo largo del vuelo (por
ser constantes el consumo especfico, la potencia y la velocidad segn el enunciado):
F
W
c
V
x =
Si queremos calcular el mximo alcance tendremos que entrar en esta ecuacin con el
peso total de combustible porque se habr consumido todo, y con los valores de c y V
que proporcionan mximo alcance:
5851
1000
1
1
3600
40000
/ 4 . 1656
/ 3 . 67
= = =
m
km
h
s
N
h N
s m
W
c
V
x
F
ALC
MAX
ALC
MAX
ALC
MAX km
Tecnologa Aeroespacial
21
21.-
STATEMENT OF WORK:
Se pretende calcular las actuaciones de un avin provisto de un motor alternativo y
hlice. El avin realiza inicialmente un vuelo horizontal rectilneo uniforme y con
velocidad de viento nula. Suponer, mientras no se diga lo contrario, que la traccin
que proporciona el motor (T) es constante y que las alas se mantienen a nivel
(vuelo sin balance).
- 950 = M kg
- 7 . 14 = S m
2
- 30 . 1 =
MAX L
C
- 1200 = T N
- 030 . 0
0
=
D
C
- 073 . 0 = k
- 225 . 1
0
= kg/m
3
- 10 . 0 =
e
c kg/kWh
NOTA: Suponer vuelo a nivel del mar, 10 ~ g m/s
2
y 2 Kt 1 ~ m/s.
Suponer que los ngulos son muy pequeos.
a) Calcular, en el vuelo horizontal descrito, la velocidad (o velocidades) y el
coeficiente (o coeficientes) de sustentacin con los que sera posible mantener
el vuelo
b) Ahora el piloto ya no desea mantener el vuelo horizontal y es libre de volar en
el plano vertical. Calcular, en ausencia de esa ligadura, el valor del ngulo
(ngulo de asiento de velocidad, que es el que forma la velocidad con el plano
horizontal) y la velocidad vertical en dos casos:
- primero, el piloto vuela con velocidad 180 km/h
- segundo, el piloto vuela con velocidad 250 km/h
c) Calcular el ngulo de ascenso mximo y la velocidad de vuelo a la que se
produce
d) La traccin mxima que es capaz de proporcionar el motor alternativo sigue
esta ley de variacin con la altitud: h T
MAX
0378 . 0 1400 = (con la altitud en
pies). Calcular el techo operacional de la aeronave
RESOLUTION:
a)
De las ecuaciones del vuelo horizontal:
W SC V L
L
= =
2
2
1
S V
W
C
L
2
2
=
) )
2
( (
2
1
) (
2
1
2
1
2
2
0
2 2
0
2 2
S V
W
k C S V kC C S V SC V D T
D L D D
+ = + = = = (1)
Sustituyendo los valores de las variables conocidas en (1):
2
2
1
89 . 731722 27 . 0 1200
V
V + =
0 78 . 2710084 44 . 4444
2 4
= + V V
Resolviendo esta ecuacin de cuarto orden se obtienen los siguientes valores:
01 . 27
2
= V m/s 446 . 1
2
=
L
C >
MAX L
C
95 . 60
1
= V m/s 284 . 0
1
=
L
C
Tecnologa Aeroespacial
22
Slo sera posible mantener el vuelo a la velocidad de segundo rgimen porque, en el
caso de intentar estabilizar el avin en vuelo horizontal a la velocidad de primer rgimen,
antes de alcanzar esa velocidad se producira la entrada en prdida.
b)
Las ecuaciones de vuelo en un plano vertical, una vez hacemos efectiva la hiptesis de
ngulos pequeos, son las siguientes:
sin W D T + = W D T + ~
W
D T
~ (2)
cos W L = W L ~
S V
W
C
L
2
2
~ (3)
) )
2
( (
2
1
) (
2
1
2
2
0
2 2
0
2
S V
W
k C S V kC C S V D
D L D
+ ~ + = (4)
CASO 1: velocidad 180 km/h:
Conociendo la velocidad se puede calcular el coeficiente de sustentacin en (3) y con
ste el de resistencia inducida. Hecho esto se puede obtener mediante (4) la resistencia
aerodinmica y entrando en (2) con ella se obtiene el ngulo de asiento de velocidad:
50 = V m/s 422 . 0 =
L
C 0244 . 0 = rad
043 . 0 =
D
C 22 . 1 / = C R m/s
97 . 967 = D N
CASO 2: velocidad 250 km/h:
Operando de manera anloga al caso anterior se obtiene:
70 = V m/s 22 . 0 =
L
C 0268 . 0 = rad
033 . 0 =
D
C 86 . 1 / = D R m/s
21 . 1454 = D N
c)
De la ecuacin del vuelo en el plano vertical se deduce que, si se pretende maximizar el
ngulo de asiento de velocidad (equivalente a maximizar el sinus de ese ngulo, dado
que la funcin sinus es creciente con el ngulo), se debe volar con la mnima resistencia
aerodinmica, teniendo en cuenta que segn el enunciado la traccin y el peso son
constantes:
W
D T
= sin
W
D T
W
D T
MIN
MAX MAX
=
= ) ( ) (sin
Luego la velocidad de vuelo para ngulo de ascenso mximo es la velocidad de mnima
resistencia aerodinmica que se obtiene con la siguiente expresin bajo la hiptesis de
ngulos de vuelo pequeos:
W L ~ 57 . 40
2 2
4
0
= = = =
D OPT L
MIN D
MAX
C
k
S
W
SC
W
V V
m/s
Operando como en el apartado b), una vez conocida esta velocidad se puede calcular el
resto de variables:
35 . 889 =
MIN
D N 0327 . 0 =
MAX
rad
Tecnologa Aeroespacial
23
d)
El techo operacional es la altitud mxima a la que una aeronave puede mantener el vuelo
horizontal rectilneo uniforme. Dicha altitud es, por definicin, aqulla en la que el empuje
mximo que puede proporcionar el motor se iguala a la resistencia aerodinmica mnima
en el vuelo horizontal rectilneo. A mayor altitud que el techo, el empuje mximo del
motor no es capaz de compensar la resistencia aerodinmica mnima y por tanto no se
puede mantener el vuelo horizontal.
35 . 889 ) ( ) (
2
1
2
0
2
0
2
= + = + = =
OPT L D
OPT L
OPT L D MIN D MIN MAX
kC C
C
W
kC C S V D T N
Aplicando la condicin que se acaba de exponer al caso que nos ocupa:
35 . 889 0378 . 0 1400 ) ( = = h h T
MAX
13500 = h ft
8 . 4114 = h m
Tecnologa Aeroespacial
24
22.-
STATEMENT OF WORK:
Un avin con una masa de 4000 kg y una superficie alar de 20 m
2
tiene un ala con
las siguientes configuraciones de flaps:
Configuracin limpia (0):
- o 1 . 0 1 . 0
0
+ = FLAPS
L
C
- 10 =
S
o
- 01 . 0
0
=
D
FLAPS
L
C C
Configuracin de flaps a 10:
- o 1 . 0 1
10
+ = FLAPS
L
C
- 10 =
S
o
- 135 . 0 2
10
=
D
FLAPS
L
C C
a) Calcular cunto vale la velocidad de prdida para cada configuracin en vuelo
horizontal y a altitud 7000 ft (donde la densidad vale aproximadamente 1 kg/m
3
)
b) Calcular cunto vale la velocidad ptima de cambio de flaps para pasar de flaps
a 10 a configuracin limpia y a qu ngulo de ataque corresponde
RESOLUTION:
a)
1 . 1
0
= FLAPS
MAX L
C 3 . 60
2
0
7000
0
= =
FLAPS
MAX L
FLAPS
S
C S
W
V
m/s
0 . 2
10
= FLAPS
MAX L
C 7 . 44
2
10
7000
10
= =
FLAPS
MAX L
FLAPS
S
C S
W
V
m/s
b)
El punto ptimo de cambio de configuracin de flaps se encuentra por interseccin de las
curvas polares correspondientes a cada configuracin:
10 0
FLAPS
D
FLAPS
D
C C =
2 2
5 . 0 135 . 0 01 . 0
L L
C C + = +
5 . 0 =
L
C 89
2
7000
= =
L
SC
W
V
m/s
5
1 . 0
1
=
=
L
C
o
Tecnologa Aeroespacial
25
23.-
STATEMENT OF WORK:
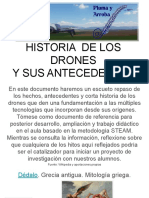
Suppose the following hypotheses for the motion of a fluid inside a given duct with
circular cross-sectional shape (see figure below, which could be for instance the
sketch of a vectorial nozzle):
- The problem is stationary and uniform
- The fluid is ideal
- The velocity of sound is: 340 m/s
- The fluid can be considered uncompressible
1
at any time
a) Obtain the flow velocity in the outlet as a function of the velocity at the inlet and
also for a particular case in which the inlet velocity is 30 m/s
b) Obtain the flow velocity for a generic section as a function of coordinate x and
also for a particular case in which x is 0.4 m
c) Obtain the static pressure for a generic section as a function of coordinate x
and also for a particular case in which x is 0.4 m
d) The pilot adjusts the outlet section radius and sets a new value of 0.15 m. How
much bigger is the flow velocity at the outlet in the first case as compared to
the flow velocity for this wider outlet?
RESOLUTION:
a)
Using the continuity equation for uncompressible fluids:
cte AV = cte AV =
2 2 1 1
V A V A =
1 1
2
2
1
2
1
2
4
1 . 0
2 . 0
V V V
A
A
V = = =
t
t
[m/s]
30
1
= V m/s 120 4
1 2
= = V V m/s
1
Flow velocities inside aircraft and rocket nozzles are in the supersonic regime, thus in reality air cannot
be considered uncompressible in these cases.
Tecnologa Aeroespacial
26
b)
To find a formula for the value of the cross-sectional area as a function of coordinate x, it
is necessary to know the radius of the duct as a function of coordinate x too. This former
equation is nothing else but the equation of the straight line that joins the points (0, 0.2)
and (0.8, 0.1):
x x R
80 . 0
10 . 0
2 . 0 ) ( = [m]
So the value of the cross-sectional area as a function of coordinate x:
2
)
80 . 0
10 . 0
2 . 0 ( ) ( ) ( x x R x A = = t t [m
2
]
Using again the continuity equation for uncompressible fluids:
) ( ) (
1 1
x V x A V A =
1
2
2
1
1
)
8 . 0
1 . 0
2 . 0 (
2 . 0
) (
) ( V
x
V
x A
A
x V
= =
t
t
[m/s]
1 1
2
2
1
2
2
78 . 1
) 15 . 0 (
2 . 0
) 4 . 0
8 . 0
1 . 0
2 . 0 (
2 . 0
) 4 . 0 ( V V V x V = =
= = [m/s]
c)
To obtain the static pressure distribution for the flow through the duct we use Bernoullis
equation. This equation is valid for this problem due to the assumed hypotheses:
2 2
1 1
) (
2
1
) (
2
1
x V x p V p + = + ( )
2 2
1 1
) (
2
1
) ( x V V p x p + =
|
|
|
|
.
|
\
|
+ =
|
|
|
|
.
|
\
|
|
|
|
|
.
|
\
|
+ =
4
3
2
1 1
2
1
2
2
2
1 1
)
8 . 0
1 . 0
2 . 0 (
10 6 . 1
1
2
1
)
8 . 0
1 . 0
2 . 0 (
2 . 0
2
1
) (
x
V p V
x
V p x p
d)
We already now that for the first case (lets call it case A), the one in which the outlet is
0.1 m wide, the flow velocity at the outlet is:
( )
1 2
4V V
A
=
In the second case (lets call it case B), the one in which the outlet is 0.15 m wide, the
flow velocity at the outlet is:
( )
B
V A V A
2 2 1 1
= ( )
( )
1 1
2
2
1
2
1
2
78 . 1
15 . 0
2 . 0
V V V
A
A
V
B
B
= = =
t
t
[m/s]
The relationship between flow velocity at the outlet in case A and B is as follows:
( )
( )
25 . 2
78 . 1
4
1
1
2
2
= =
V
V
V
V
B
A
Flow velocity in the first case is then 2.25 times the flow velocity in the second case (or
we can say also that it the flow velocity in the first case is 225% of the flow velocity in the
second case).
Tecnologa Aeroespacial
27
24.-
STATEMENT OF WORK:
Suppose the following hypotheses for the study of the performances of an airfoil
inside a wind tunnel:
- The problem is stationary and uniform
- The fluid is ideal
- The fluid can be considered uncompressible at any time
a) Which is the angle of attack (AOA), the chord, the camber and the thickness of
the airfoil in this test, considering that the upper surface is a convex parabola?
b) Obtain the flow velocity for a generic section of the wind tunnel, over the upper
surface and below the lower surface, as a function of coordinate x
c) Obtain the static pressure for a generic section of the wind tunnel, over the
upper surface and below the lower surface, as a function of coordinate x
RESOLUTION:
a)
The AOA is null, the chord is 2 m long, the (maximum) camber is 0.1 m (5%) and the
(maximum) thickness is 0.2 m (10%). Note that the airfoil will generate lift although the
AOA is null due to its camber being non-zero.
b)
The lower surface is coincident with the chord and the x axis. Due to the lower surface
being flat, the cross-sectional area of the virtual duct for the flow passing below the lower
surface does not vary. As a consequence, neither the flow velocity nor the static pressure
of that part of the flow is altered by the airfoil (according to continuity and Bernoulli
equations). Summarizing, the flow velocity below the lower surface does not change with
x, it is constant and equal to V
1
.
For the flow passing over the upper surface the velocity and static pressure will be altered
since the cross-sectional area of the virtual duct changes over the upper surface. The
curve describing the upper surface is:
2
2 . 0 2 . 0 ) ( x x z
E
= [m]
Say w is the width of the wind tunnel and h the height of the virtual duct (semi-height of
the wind tunnel). The value of the cross-sectional area as a function of coordinate x for
this particular wind tunnel (in which both the width and the semi-height are 1 m) is:
( ) ) ( ) ( x z h w x A
E
= [m
2
] ) ( 1 ) ( x z x A
E
= [m
2
]
Tecnologa Aeroespacial
28
Using the continuity equation for uncompressible fluids:
cte AV = cte AV =
) ( ) (
1 1
x V x A V A =
2
1 1
1
1
2 . 0 8 . 0 ) ( 1 ) (
) (
x
V
x z
V
V
x A
A
x V
E
+
=
= = [m/s]
c)
According to the flat shape of the lower surface, the static pressure does not change with
x, it is constant and equal to p
1
.
To obtain the static pressure distribution for the flow passing over the upper surface we
need to use Bernoullis equation. This equation is valid for this problem due to the
assumed hypotheses:
2 2
1 1
) (
2
1
) (
2
1
x V x p V p + = + ( )
2 2
1 1
) (
2
1
) ( x V V p x p + =
( )
|
|
.
|
\
|
+
+ =
|
|
.
|
\
|
|
.
|
\
|
+
+ =
2
2
2
1 1
2
2
1
2
1 1
2 . 0 8 . 0
1
1
2
1
2 . 0 8 . 0 2
1
) (
x
V p
x
V
V p x p
You might also like
- Bell 429 y 505Document68 pagesBell 429 y 505DIEGO ORTIZ100% (2)
- CAP 16 MEL y CDLDocument38 pagesCAP 16 MEL y CDLPablo GuevaraNo ratings yet
- 1Document25 pages1Yendry EstevezNo ratings yet
- Estructuras Aeronauticas Rev 001Document29 pagesEstructuras Aeronauticas Rev 001Juan Manuel BonillaNo ratings yet
- Materiales Aeronáuticos de La Segunda Guerra MundialDocument16 pagesMateriales Aeronáuticos de La Segunda Guerra MundialEsli Anerol Aruges RoznevNo ratings yet
- Llenado de FormatosDocument8 pagesLlenado de FormatosofeliaNo ratings yet
- Aero PDFDocument4 pagesAero PDFel_tano33No ratings yet
- Señales HelitacticasDocument37 pagesSeñales HelitacticasMarcel ChaconNo ratings yet
- Controles de VueloDocument26 pagesControles de VueloEdison TaipeNo ratings yet
- Aeronaves TipoDocument39 pagesAeronaves TipoCarlos RamirezNo ratings yet
- Explosion SonicaDocument8 pagesExplosion SonicaGuimer Miguel PeñarandaNo ratings yet
- El D-LZ 127 Graf Zeppelin en ArgentinaDocument43 pagesEl D-LZ 127 Graf Zeppelin en ArgentinaKreeh HaatenNo ratings yet
- Examen ATS Y JEPPESENDocument11 pagesExamen ATS Y JEPPESENYahir andres Luna lopezNo ratings yet
- TemDocument17 pagesTemJuan TamaniNo ratings yet
- C 100 Wave II Vers NF100-1SH-3SH-A PDFDocument71 pagesC 100 Wave II Vers NF100-1SH-3SH-A PDFAlexander OlivosNo ratings yet
- Carta Visual MMTJDocument1 pageCarta Visual MMTJMaria De SantiagoNo ratings yet
- Perfil Aeropuerto de PiscoDocument35 pagesPerfil Aeropuerto de Piscojhosmell montesinosNo ratings yet
- Airbus HHHDocument3 pagesAirbus HHHDaniel ForeroNo ratings yet
- PREV. PI-208 Aerolineas Intermundiales (AIM)Document3 pagesPREV. PI-208 Aerolineas Intermundiales (AIM)Octavio GamezNo ratings yet
- Ob 1901 PDFDocument31 pagesOb 1901 PDFJesus Martin Muñante RamosNo ratings yet
- Fraseología para El Control de AeródromoDocument15 pagesFraseología para El Control de AeródromocontroladoraereoNo ratings yet
- Boeing VS AirbusDocument9 pagesBoeing VS AirbusJose MiguelNo ratings yet
- Circular Opertiva ATS 03 - 10 MÍNIMOS DE VISIBILIDAD PARA DESPEGUEDocument3 pagesCircular Opertiva ATS 03 - 10 MÍNIMOS DE VISIBILIDAD PARA DESPEGUEMarce PeñalozaNo ratings yet
- Presentación de PowerPoint AviacolDocument28 pagesPresentación de PowerPoint AviacolCarlos Andres Pupo RojasNo ratings yet
- 21 SkgyDocument25 pages21 SkgyDaniela García SissaNo ratings yet
- Arado E 555Document5 pagesArado E 555Inseguridad AsaltosNo ratings yet
- RAC 20 - Matrícula, Registro e Identificación de AeronavesDocument51 pagesRAC 20 - Matrícula, Registro e Identificación de AeronavesRafael Eduardo Castro MedinaNo ratings yet
- El Centro de Investigación e Innovación en Ingeniería Aeronáutica y Su Relación Con La Industria Del Norte de MéxicoDocument29 pagesEl Centro de Investigación e Innovación en Ingeniería Aeronáutica y Su Relación Con La Industria Del Norte de MéxicoArturoNo ratings yet
- Historia de Los Drones y Sus AntecedentesDocument51 pagesHistoria de Los Drones y Sus AntecedentesCristina BandresNo ratings yet
- Manual Oficina Certificación Aeronáutica de La Defensa MOCAD - FAC-4.1.9-ODocument110 pagesManual Oficina Certificación Aeronáutica de La Defensa MOCAD - FAC-4.1.9-OJaime SernaNo ratings yet