You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Worksheet 14 - Hybridization: 2 The Other SP Orbitals Hold The Oxygen Lone PairsDocument5 pagesWorksheet 14 - Hybridization: 2 The Other SP Orbitals Hold The Oxygen Lone PairsKosmos100% (1)
- Physics Report Simple PendulumDocument3 pagesPhysics Report Simple PendulumGracey- Ann Johnson100% (2)
- Refrigerator Priciples and WorkingDocument16 pagesRefrigerator Priciples and WorkingSanthan SalaiNo ratings yet
- Tabla ZDocument1 pageTabla Zfredsaint100% (1)
- Online Workshop Analisa Gangguan PetirDocument64 pagesOnline Workshop Analisa Gangguan PetirJumhanter hutagaolNo ratings yet
- Biosocial Nature of Man Ashley MontaguDocument132 pagesBiosocial Nature of Man Ashley MontaguMonalisa Vasile100% (2)
- Beam Double Integration ExampleDocument3 pagesBeam Double Integration ExampleCIVIL100No ratings yet
- Block Names Find and ReplaceDocument1 pageBlock Names Find and ReplaceCIVIL100No ratings yet
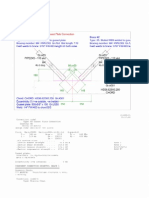
- Node1 - KT Gusset Plate ConnectionDocument1 pageNode1 - KT Gusset Plate ConnectionCIVIL100No ratings yet
- Boussinesq or Westergaard Equation - by Richard P. RayDocument1 pageBoussinesq or Westergaard Equation - by Richard P. RayCIVIL100No ratings yet
- Finite Strain Consolidation Model ComparisonDocument31 pagesFinite Strain Consolidation Model ComparisonguieeduNo ratings yet
- Coefficients For Computing Natural Circular FrequenciesDocument1 pageCoefficients For Computing Natural Circular FrequenciesCIVIL100No ratings yet
- Tabla de Conversiones IsDocument1 pageTabla de Conversiones IsCIVIL100No ratings yet
- SEO Column DesignDocument4 pagesSEO Column DesignCIVIL100No ratings yet
- Soil Structure Interaction02Document13 pagesSoil Structure Interaction02George GeorgianNo ratings yet
- Placa Base LRFDDocument1 pagePlaca Base LRFDCIVIL100No ratings yet
- Bridge Distribution CVDocument1 pageBridge Distribution CVCIVIL100No ratings yet
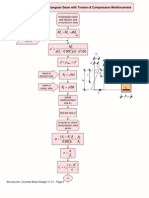
- Concrete Beam Design - DIAGDocument1 pageConcrete Beam Design - DIAGCIVIL100No ratings yet
- Rhs Connection TypesDocument1 pageRhs Connection TypesCIVIL100No ratings yet
- Formulas Parabola HalfDocument1 pageFormulas Parabola HalfCIVIL100No ratings yet
- Mexico Seismic ZoneDocument1 pageMexico Seismic ZoneCIVIL100No ratings yet
- Shear Plate ConnectionDocument1 pageShear Plate ConnectionCIVIL100No ratings yet
- Space Station FreedomDocument1 pageSpace Station FreedomCIVIL100No ratings yet
- Shear Plate ConnectionDocument1 pageShear Plate ConnectionCIVIL100No ratings yet
- Live Load t3-s2-r4 t2 - SCTDocument1 pageLive Load t3-s2-r4 t2 - SCTCIVIL100No ratings yet
- Pile Spring Supports1Document1 pagePile Spring Supports1CIVIL100No ratings yet
- Properties of Building MaterialsDocument1 pageProperties of Building MaterialsMohd AzharNo ratings yet
- Loma Prieta 1989 - EarthquakeDocument1 pageLoma Prieta 1989 - EarthquakeCIVIL100No ratings yet
- Horizontal Shear Formula1Document1 pageHorizontal Shear Formula1CIVIL100No ratings yet
- Design of Interior Slab Panel1Document1 pageDesign of Interior Slab Panel1CIVIL100No ratings yet
- Solucion Rigideces Equiv Pais KauselDocument2 pagesSolucion Rigideces Equiv Pais KauselCIVIL100No ratings yet
- Collapse of Fukae Viaduct, 1995 Kobe EarthquakeDocument1 pageCollapse of Fukae Viaduct, 1995 Kobe EarthquakeCIVIL100No ratings yet
- WHWWL Loader994fDocument1 pageWHWWL Loader994fCIVIL100No ratings yet
- Reinfor Details BeamsDocument6 pagesReinfor Details BeamsCIVIL100No ratings yet
- Advances in Water Polllution Monitoring and ControlDocument185 pagesAdvances in Water Polllution Monitoring and Controlantonioheredia100% (1)
- Startup BoilerDocument51 pagesStartup BoilerSahariar Bin ShafiqueNo ratings yet
- IodinDocument7 pagesIodinnovi lianaNo ratings yet
- Full Test Bank For Child and Adolescent Development An Integrated Approach 1St Edition Bjorklund PDF Docx Full Chapter ChapterDocument36 pagesFull Test Bank For Child and Adolescent Development An Integrated Approach 1St Edition Bjorklund PDF Docx Full Chapter Chapterslogmaying7y5g100% (8)
- UltimateDocument34 pagesUltimateTaren JamirNo ratings yet
- Formation Damage Cuased by A Water Blockage Chemical SPE-00073790Document12 pagesFormation Damage Cuased by A Water Blockage Chemical SPE-00073790Oscar Mauricio TellezNo ratings yet
- Syllabus Mas291 Fall2021Document18 pagesSyllabus Mas291 Fall2021Triết VũNo ratings yet
- CW & CCW System 3Document13 pagesCW & CCW System 3Dwi CahyonoNo ratings yet
- LabovWaletzky Narrative ModelDocument2 pagesLabovWaletzky Narrative ModelTatianaNo ratings yet
- Origin of Society and Social Contract TheoryDocument4 pagesOrigin of Society and Social Contract TheoryFreshie PascoNo ratings yet
- KSH13007 KSH13007: SEMIHOW REV.A1, Oct 2007Document6 pagesKSH13007 KSH13007: SEMIHOW REV.A1, Oct 2007Manolo DoperNo ratings yet
- Analysis of The Product and Destination Image of BrightonDocument12 pagesAnalysis of The Product and Destination Image of BrightonDani QureshiNo ratings yet
- Psych Stats CIA-2030206 Method FileDocument39 pagesPsych Stats CIA-2030206 Method FileAranya BanerjeeNo ratings yet
- Week#4-Measure of DispersionDocument52 pagesWeek#4-Measure of DispersionWHO Cox's BazarNo ratings yet
- Environmental and Social Impact Assessment for Tamane Gamada Exploration ProjectDocument39 pagesEnvironmental and Social Impact Assessment for Tamane Gamada Exploration ProjectFiraol GetenetNo ratings yet
- Naoroj Muntashir: Curriculum Vitae ofDocument3 pagesNaoroj Muntashir: Curriculum Vitae ofMizanul HoqueNo ratings yet
- CES 156-2015 ES-1996 Design of Masonry Structures - Part 1-1Document129 pagesCES 156-2015 ES-1996 Design of Masonry Structures - Part 1-1China AlemayehouNo ratings yet
- Laboratory Ergonomics Checklist: (DOSH Registration)Document3 pagesLaboratory Ergonomics Checklist: (DOSH Registration)Bakhtiar DollahNo ratings yet
- Nature and Scope of EconomicsDocument6 pagesNature and Scope of EconomicsRenu AgrawalNo ratings yet
- Prof Ed 13 - Episode 1Document6 pagesProf Ed 13 - Episode 1Apelacion L. VirgilynNo ratings yet
- TROUBLE CODE - Ma-1Document55 pagesTROUBLE CODE - Ma-1José Rojo EspinozaNo ratings yet
- ADB Procurement Framework UpdateDocument59 pagesADB Procurement Framework UpdateAvisheak PalNo ratings yet
- English 10 Q1 W3Document7 pagesEnglish 10 Q1 W3Edgar FerrerNo ratings yet
- Advanced Result: Unit 1 Test: (10 Marks)Document3 pagesAdvanced Result: Unit 1 Test: (10 Marks)Edu Lamas GallegoNo ratings yet
- Math1530finalreview NospacesDocument10 pagesMath1530finalreview Nospacesapi-502745314No ratings yet