You might also like
- Lagrange Points Stability ExplainedDocument4 pagesLagrange Points Stability ExplainedHandita Sutoyo100% (1)
- Monolith Multiphase 2012Document52 pagesMonolith Multiphase 2012asertve100% (1)
- Generating Periodic Orbits in The Circular Restricted Three Body Problem With Applications To Lunar South Pole CoverageDocument165 pagesGenerating Periodic Orbits in The Circular Restricted Three Body Problem With Applications To Lunar South Pole CoverageJeb KermanNo ratings yet
- New Methods in Celestial Mechanics & Mission Design - Marsden & RossDocument31 pagesNew Methods in Celestial Mechanics & Mission Design - Marsden & RossStargateANo ratings yet
- Kilmartin Dissertation Worldviews in TransitionDocument334 pagesKilmartin Dissertation Worldviews in Transitionr8b8l100% (2)
- Visionary World GigerDocument54 pagesVisionary World GigerPatricio BertacchiniNo ratings yet
- Continuous Low-Thrust Trajectory Optimization PDFDocument136 pagesContinuous Low-Thrust Trajectory Optimization PDFkuldeepNo ratings yet
- PHYS3080 Distance Ladder Project Report Analysis of Galaxies in the UniverseDocument8 pagesPHYS3080 Distance Ladder Project Report Analysis of Galaxies in the UniverseMatt BonannoNo ratings yet
- Intrinsic Redshifts in Quasars and Galaxies Cluster at z=2.14Document36 pagesIntrinsic Redshifts in Quasars and Galaxies Cluster at z=2.14Bryan GraczykNo ratings yet
- Mathavaraj 2015Document9 pagesMathavaraj 2015Mysonic NationNo ratings yet
- Lab 02-Center of The Galaxy LabDocument7 pagesLab 02-Center of The Galaxy LabBNo ratings yet
- Gravitational Flux and Space Curvatures Under Gravitational ForcesDocument4 pagesGravitational Flux and Space Curvatures Under Gravitational ForcespaharalalageNo ratings yet
- The Tychonic SystemDocument8 pagesThe Tychonic SystemNelson GaualabNo ratings yet
- Cosmic Distance LadderDocument18 pagesCosmic Distance LadderGregor SamsaNo ratings yet
- How Mass of The Universe Has Been Increasing?Document2 pagesHow Mass of The Universe Has Been Increasing?K.A.S.S. Kuruppuarachchi100% (2)
- PHD Thesis - THE ALGORITHMIC WEAK STABILITY BOUNDARY IN EARTH-TO-MOON MISSION DESIGN: DYNAMICAL ASPECTS AND APPLICABILITYDocument14 pagesPHD Thesis - THE ALGORITHMIC WEAK STABILITY BOUNDARY IN EARTH-TO-MOON MISSION DESIGN: DYNAMICAL ASPECTS AND APPLICABILITYPriscilla Sousa-SilvaNo ratings yet
- DNA Monthly Vol 5 No 3 March09Document13 pagesDNA Monthly Vol 5 No 3 March09pibo100% (1)
- Lunar soil properties and formation processesDocument6 pagesLunar soil properties and formation processesAryan KhannaNo ratings yet
- TimeDocument147 pagesTimelev133No ratings yet
- How Gauss Determined The Orbit of CeresDocument85 pagesHow Gauss Determined The Orbit of CeresDamián Neri100% (2)
- Faked Moon LandingsDocument8 pagesFaked Moon Landingssajid_parvez2008No ratings yet
- 10 Reasons Why Moon Landing Could Be A HoaxDocument13 pages10 Reasons Why Moon Landing Could Be A HoaxDruzmaNo ratings yet
- Lecture 1 - Introduction To Astronomy (White Background)Document16 pagesLecture 1 - Introduction To Astronomy (White Background)bizzydude100% (1)
- SPH 202 Modern Physics: Dr. N. O.Hashim Department of Physics Kenyatta University January 13, 2015Document97 pagesSPH 202 Modern Physics: Dr. N. O.Hashim Department of Physics Kenyatta University January 13, 2015KeybateNo ratings yet
- Makalah Ipa Dasar I Earth and Tata SuryaDocument17 pagesMakalah Ipa Dasar I Earth and Tata SuryaAnil YusufNo ratings yet
- The Universe and The Human BodyDocument6 pagesThe Universe and The Human Body: Dr. EMAD KAYYAM.100% (1)
- Amos Ariny (Astronomer) BiographyDocument140 pagesAmos Ariny (Astronomer) BiographyDr. Amos ArinyNo ratings yet
- AURORA BOREALIS: Nature's Dancing LightsDocument19 pagesAURORA BOREALIS: Nature's Dancing LightsFadhila SalsabilaNo ratings yet
- SETI - The Search For Extraterrestrial IntelligenceDocument25 pagesSETI - The Search For Extraterrestrial IntelligenceParas TalujaNo ratings yet
- Laws of ElectromagnetismDocument5 pagesLaws of ElectromagnetismSukalyan GhoshalNo ratings yet
- A Critique of Maxwell-Lorentz ElectrodynamicsDocument12 pagesA Critique of Maxwell-Lorentz ElectrodynamicsCristian MorariNo ratings yet
- Stars and Classification Objectives SheetDocument3 pagesStars and Classification Objectives Sheetncl12142No ratings yet
- Hydrogen AtomDocument8 pagesHydrogen AtomElyasse B.No ratings yet
- 16: Implications of The Model: The Fool's SecretDocument12 pages16: Implications of The Model: The Fool's Secretdocwavy9481No ratings yet
- The Purpose of Life & Universe (ILN)Document962 pagesThe Purpose of Life & Universe (ILN)acethi8855No ratings yet
- Gravitational WavesDocument15 pagesGravitational WavesSourabh PrakashNo ratings yet
- Gravitational Waves Provide Evidence for the Materiality of SpacetimeDocument5 pagesGravitational Waves Provide Evidence for the Materiality of SpacetimethemechanixNo ratings yet
- The Everlasting StormDocument2 pagesThe Everlasting StormNatalia SkrempouNo ratings yet
- The Eons of Chaos and HadesDocument3 pagesThe Eons of Chaos and HadesBaiatuCuBulanNo ratings yet
- Rigid Body MotionDocument8 pagesRigid Body Motiondesi prawitaNo ratings yet
- UCLA Astronomy 3 Practice ExamDocument7 pagesUCLA Astronomy 3 Practice ExamSharon XuNo ratings yet
- Lunar SurvivalDocument6 pagesLunar SurvivalnimmymathewpkkthlNo ratings yet
- Galactic AstronomyDocument46 pagesGalactic AstronomyMr Aroo100% (1)
- Plugin-Plasma 4th State of MatterDocument42 pagesPlugin-Plasma 4th State of Matterr2b2mNo ratings yet
- History of Space Exploration PDFDocument28 pagesHistory of Space Exploration PDFMitreya VellalaNo ratings yet
- NASA Teachers Guide To The UniverseDocument167 pagesNASA Teachers Guide To The UniverseJack MoselNo ratings yet
- Free FallDocument5 pagesFree FallDoctora NourhanNo ratings yet
- Cosmology: Myth or Science?: Hannes AlfvénDocument20 pagesCosmology: Myth or Science?: Hannes AlfvénChirag SolankiNo ratings yet
- SaturnDocument8 pagesSaturnJoy PlacidoNo ratings yet
- The Four Fundamentals Effect and Use of The Flight Controls: (Figure 3-2) The Following Is Always True, Regardless of TheDocument2 pagesThe Four Fundamentals Effect and Use of The Flight Controls: (Figure 3-2) The Following Is Always True, Regardless of TheyayaNo ratings yet
- pss1 Mechanics10Document8 pagespss1 Mechanics10Alejandro Garcia PerezNo ratings yet
- PLANETARY MOTION SIMULATIONS KEYDocument4 pagesPLANETARY MOTION SIMULATIONS KEYiubyvtcrxewzertyhNo ratings yet
- Triple Junction Types and StabilityDocument8 pagesTriple Junction Types and StabilityFazl UllahNo ratings yet
- 1.00 UniverseDocument17 pages1.00 Universeharish sharmaNo ratings yet
- Computation of Weak Stability Boundaries: Sun-Jupiter SystemDocument15 pagesComputation of Weak Stability Boundaries: Sun-Jupiter SystemcmpmarinhoNo ratings yet
- Ragazzo-Ruiz2017 Article ViscoelasticTidesModelsForUseIDocument41 pagesRagazzo-Ruiz2017 Article ViscoelasticTidesModelsForUseIVishnu ViswanathanNo ratings yet
- FYTB14: Exercise Sheet 2Document3 pagesFYTB14: Exercise Sheet 2lolnationNo ratings yet
- E. Ebrahimi and N. Riazi - (N + 1) - Dimensional Lorentzian Wormholes in An Expanding Cosmological BackgroundDocument12 pagesE. Ebrahimi and N. Riazi - (N + 1) - Dimensional Lorentzian Wormholes in An Expanding Cosmological BackgroundCoy668No ratings yet
- Earth-Moon Weak Stability Boundaries in The Restricted Three and Four Body ProblemDocument25 pagesEarth-Moon Weak Stability Boundaries in The Restricted Three and Four Body Problem897574012No ratings yet
- Numerical Tools For The Computation of Homoclinic/heteroclinic OrbitsDocument40 pagesNumerical Tools For The Computation of Homoclinic/heteroclinic OrbitsSeanNo ratings yet
- Space Settlements: A Design StudyDocument297 pagesSpace Settlements: A Design StudySean100% (1)
- 3 Welding Jigs: ITDG Complete Technical Drawing #19Document9 pages3 Welding Jigs: ITDG Complete Technical Drawing #19SeanNo ratings yet
- Cattail ChemurgyDocument6 pagesCattail ChemurgySeanNo ratings yet
- Construction GluesDocument5 pagesConstruction GluesSean100% (1)
- Small Scale BrickmakingDocument216 pagesSmall Scale BrickmakingSean100% (1)
- Workshop Equipment: How To Make 12 Woodworking ToolsDocument110 pagesWorkshop Equipment: How To Make 12 Woodworking ToolsSean100% (1)
- Metal - Ferrous MaterialsDocument30 pagesMetal - Ferrous MaterialsSeanNo ratings yet
- How To Use Metal TubingDocument8 pagesHow To Use Metal TubingSeanNo ratings yet
- Foundry Work For The Amateur 1975Document116 pagesFoundry Work For The Amateur 1975Rob Furnald100% (3)
- Bicycle AmbulanceDocument9 pagesBicycle AmbulanceSean100% (1)
- The Design and Manufacture of Low-Cost Motorized VehiclesDocument198 pagesThe Design and Manufacture of Low-Cost Motorized VehiclesSeanNo ratings yet
- Basic Principles of Bio Filtration in AquacultureDocument38 pagesBasic Principles of Bio Filtration in AquacultureSeanNo ratings yet
- Composite Materials Handbook Mil-Hdbk-17-5 Volume 5Document260 pagesComposite Materials Handbook Mil-Hdbk-17-5 Volume 5javier_gonzalez_cid8060No ratings yet
- Bicycles: A Case Study of Indian ExperienceDocument98 pagesBicycles: A Case Study of Indian ExperienceSeanNo ratings yet
- Piston Water PumpDocument10 pagesPiston Water PumpSeanNo ratings yet
- The Resonant Structure of Jupiter's Trojan AsteroidsDocument21 pagesThe Resonant Structure of Jupiter's Trojan AsteroidsSeanNo ratings yet
- Manual of Information: RIFE Hydraulic RamDocument19 pagesManual of Information: RIFE Hydraulic RamSean100% (1)
- Tether Transportation StudyDocument93 pagesTether Transportation StudySeanNo ratings yet
- Strategies For Solar Sail Mission Design in The Circular Restricted Three-Body ProblemDocument141 pagesStrategies For Solar Sail Mission Design in The Circular Restricted Three-Body ProblemSeanNo ratings yet
- Reciprocating Wire Power Transmission For Small Water WheelsDocument5 pagesReciprocating Wire Power Transmission For Small Water WheelsSeanNo ratings yet
- Microgravity Combustio For Material SynthesisDocument46 pagesMicrogravity Combustio For Material SynthesisSeanNo ratings yet
- The Low Cost Wooden DuplicatorDocument25 pagesThe Low Cost Wooden DuplicatorSean100% (1)
- "Symmetry and States of Self Stress in Triangulated Toroidal Frames" by P.W. Fowler and S.D. GuestDocument13 pages"Symmetry and States of Self Stress in Triangulated Toroidal Frames" by P.W. Fowler and S.D. GuestSeanNo ratings yet
- Steam Power Quarterly v-XXIXDocument46 pagesSteam Power Quarterly v-XXIXSean100% (2)
- An Amazing 10-Speed Bicycle Wheelbarrow Hybrid for Carrying Heavy LoadsDocument20 pagesAn Amazing 10-Speed Bicycle Wheelbarrow Hybrid for Carrying Heavy LoadsSeanNo ratings yet
- Understanding Pedal PowerDocument15 pagesUnderstanding Pedal PowerSean100% (1)
- Simple Tin Pump - JavaDocument9 pagesSimple Tin Pump - JavaSeanNo ratings yet
- The Sten-Screen Making and Using A Low Cost Printing ProcessDocument18 pagesThe Sten-Screen Making and Using A Low Cost Printing ProcessAndrew AyersNo ratings yet
- They May Be Old But They Work - A Solar Food Dryer... by JJDocument2 pagesThey May Be Old But They Work - A Solar Food Dryer... by JJSeanNo ratings yet
- Materials QDocument41 pagesMaterials QEses SNo ratings yet
- John Dirk Walecka - Introduction To Classical Mechanics-WSPC (2020)Document184 pagesJohn Dirk Walecka - Introduction To Classical Mechanics-WSPC (2020)Saiyad AliNo ratings yet
- Boyle's LawDocument7 pagesBoyle's LawCindy AndersonNo ratings yet
- An Investigation of The Rubbing and Ploughing in Single Grain GrindingDocument7 pagesAn Investigation of The Rubbing and Ploughing in Single Grain GrindingpbhambareNo ratings yet
- January 2016 (IAL) QP - Unit 2 Edexcel Physics A-LevelDocument24 pagesJanuary 2016 (IAL) QP - Unit 2 Edexcel Physics A-LevelAshish MashruNo ratings yet
- MAE 318 Homework 1 F17Document2 pagesMAE 318 Homework 1 F17ZarghamKhanNo ratings yet
- UNIVERSITY EXAMINATIONS STEAM PLANT III THEORYDocument13 pagesUNIVERSITY EXAMINATIONS STEAM PLANT III THEORYGarry Van der Beek100% (1)
- z.2. Sertifikat + Materi Seminar Internasional Usm 2022 (Lengkap)Document6 pagesz.2. Sertifikat + Materi Seminar Internasional Usm 2022 (Lengkap)Sutarno -No ratings yet
- Class 5 Mechanical Systems (Both Translation and Rotational)Document22 pagesClass 5 Mechanical Systems (Both Translation and Rotational)Acharya Mascara PlaudoNo ratings yet
- Edexcel M3 NotesDocument44 pagesEdexcel M3 NotesNani AhmedNo ratings yet
- E 101Document21 pagesE 101EberVelazquezChantacaNo ratings yet
- Engr 2900 Mech of Materials Exam 2 KeysDocument8 pagesEngr 2900 Mech of Materials Exam 2 KeysAshleyHeldNo ratings yet
- Flow Coefficients of Orifice and Mouthpiece ExperimentDocument5 pagesFlow Coefficients of Orifice and Mouthpiece ExperimentAshish VermaNo ratings yet
- AOE 5104 Class Notes and ScheduleDocument26 pagesAOE 5104 Class Notes and ScheduleverbicarNo ratings yet
- Control of Closed-Loop Differential Drive Mobile Robot Using Forward and Reverse KinematicsDocument4 pagesControl of Closed-Loop Differential Drive Mobile Robot Using Forward and Reverse KinematicsElias GarcíaNo ratings yet
- Thermoacoustic CoolingDocument10 pagesThermoacoustic CoolingElisabeth MorseNo ratings yet
- Concrete Failure MechanismsDocument44 pagesConcrete Failure MechanismsHemin ZZNo ratings yet
- FoundationsDocument8 pagesFoundationsnahzemNo ratings yet
- Modeling of Dynamic Systems: An Introduction to Quantities, Models, and Model Solution MethodsDocument666 pagesModeling of Dynamic Systems: An Introduction to Quantities, Models, and Model Solution MethodsZahid RontyNo ratings yet
- Chapter-Two Part 1Document26 pagesChapter-Two Part 1Wiz Nati XvNo ratings yet
- Midas Civil ManualDocument33 pagesMidas Civil ManualAyoola Oluwadotun100% (2)
- MCS11 Paper 150Document10 pagesMCS11 Paper 150propulamiNo ratings yet
- Jee Mains Previous Year Paper Class 12 Physics 2023 15 April Shift 1 Actual Doubtnut English Medium 2023 Web 3Document38 pagesJee Mains Previous Year Paper Class 12 Physics 2023 15 April Shift 1 Actual Doubtnut English Medium 2023 Web 3putinmodi3No ratings yet
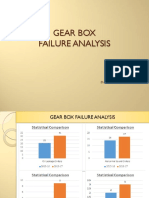
- Gear Box Failure AnalysisDocument39 pagesGear Box Failure AnalysisAli Hasnain100% (1)
- Steen e Ken 1989Document20 pagesSteen e Ken 1989suryakantNo ratings yet
- Machine Design ProjectDocument35 pagesMachine Design ProjectDũng PhanNo ratings yet
- NCERT Solutions For Class 11 Physics 15may Chapter 7 System of Particles and Rotational MotionDocument36 pagesNCERT Solutions For Class 11 Physics 15may Chapter 7 System of Particles and Rotational Motiondaksh tyagiNo ratings yet
- 3.electric Charges Forces and FieldstheoryDocument25 pages3.electric Charges Forces and FieldstheoryGomes Ribeiro100% (1)
- Ultrasonic Testing HandbookDocument89 pagesUltrasonic Testing HandbookSucipta Pratama100% (9)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (1104)
- Mercury in Retrograde: And Other Ways the Stars Can Teach You to Live Your Truth, Find Your Power, and Hear the Call of the UniverseFrom EverandMercury in Retrograde: And Other Ways the Stars Can Teach You to Live Your Truth, Find Your Power, and Hear the Call of the UniverseRating: 5 out of 5 stars5/5 (5)
- The Accelerating Universe: Infinite Expansion, the Cosmological Constant, and the Beauty of the CosmosFrom EverandThe Accelerating Universe: Infinite Expansion, the Cosmological Constant, and the Beauty of the CosmosRating: 4 out of 5 stars4/5 (25)
- When the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyFrom EverandWhen the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyRating: 3 out of 5 stars3/5 (7)
- Believing Is Seeing: A Physicist Explains How Science Shattered His Atheism and Revealed the Necessity of FaithFrom EverandBelieving Is Seeing: A Physicist Explains How Science Shattered His Atheism and Revealed the Necessity of FaithRating: 5 out of 5 stars5/5 (32)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Across the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsFrom EverandAcross the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsNo ratings yet
- Beginning and the End of Everything: From the Big Bang to the End of the UniverseFrom EverandBeginning and the End of Everything: From the Big Bang to the End of the UniverseRating: 5 out of 5 stars5/5 (61)
- The Creator and the Cosmos: How the Latest Scientific Discoveries Reveal GodFrom EverandThe Creator and the Cosmos: How the Latest Scientific Discoveries Reveal GodRating: 5 out of 5 stars5/5 (4)
- Under Alien Skies: A Sightseer's Guide to the UniverseFrom EverandUnder Alien Skies: A Sightseer's Guide to the UniverseRating: 4.5 out of 5 stars4.5/5 (16)
- The Varieties of Scientific Experience: A Personal View of the Search for GodFrom EverandThe Varieties of Scientific Experience: A Personal View of the Search for GodRating: 4.5 out of 5 stars4.5/5 (272)
- You Are Here: A Portable History of the UniverseFrom EverandYou Are Here: A Portable History of the UniverseRating: 4 out of 5 stars4/5 (30)
- The End of Everything: (Astrophysically Speaking)From EverandThe End of Everything: (Astrophysically Speaking)Rating: 4.5 out of 5 stars4.5/5 (155)
- The Astrology Dictionary: Cosmic Knowledge from A to ZFrom EverandThe Astrology Dictionary: Cosmic Knowledge from A to ZRating: 4.5 out of 5 stars4.5/5 (6)
- The Extraterrestrial Species Almanac: The Ultimate Guide to Greys, Reptilians, Hybrids, and NordicsFrom EverandThe Extraterrestrial Species Almanac: The Ultimate Guide to Greys, Reptilians, Hybrids, and NordicsRating: 4.5 out of 5 stars4.5/5 (37)
- The Holographic Universe: The Revolutionary Theory of RealityFrom EverandThe Holographic Universe: The Revolutionary Theory of RealityRating: 4.5 out of 5 stars4.5/5 (75)
- The Zodiac by Degrees: Second Edition, Extensively RevisedFrom EverandThe Zodiac by Degrees: Second Edition, Extensively RevisedRating: 4.5 out of 5 stars4.5/5 (22)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- Alien Earths: The New Science of Planet Hunting in the CosmosFrom EverandAlien Earths: The New Science of Planet Hunting in the CosmosRating: 4 out of 5 stars4/5 (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- The Field Updated Ed: The Quest for the Secret Force of the UniverseFrom EverandThe Field Updated Ed: The Quest for the Secret Force of the UniverseRating: 4.5 out of 5 stars4.5/5 (16)