You might also like
- Use Your HeadDocument157 pagesUse Your HeadPraveen95% (39)
- FIbre Optic Basic ParametersDocument2 pagesFIbre Optic Basic ParameterskarthiksugamNo ratings yet
- XUV300 Owners Manual PDFDocument308 pagesXUV300 Owners Manual PDFkarthiksugamNo ratings yet
- Daily Concentration NewDocument30 pagesDaily Concentration NewChitic Mihaela83% (6)
- 359614522success Tips2012Document2 pages359614522success Tips2012Kunal ChaudharyNo ratings yet
- A Theory About WaveguidesDocument5 pagesA Theory About WaveguideskarthiksugamNo ratings yet
- GHG PDFDocument26 pagesGHG PDFkarthiksugamNo ratings yet
- Cause of Global WarmingDocument1 pageCause of Global WarmingkarthiksugamNo ratings yet
- The sun produces muon neutrinos without oscillationsDocument17 pagesThe sun produces muon neutrinos without oscillationsMuty FebriyantiNo ratings yet
- Super Hetero Dyne ReceiverDocument18 pagesSuper Hetero Dyne ReceiverkarthiksugamNo ratings yet
- Baud Rate and Bandwidth DifferenceDocument1 pageBaud Rate and Bandwidth DifferencekarthiksugamNo ratings yet
- Fibers UsedDocument4 pagesFibers UsedkarthiksugamNo ratings yet
- Latch and Flip FlopDocument1 pageLatch and Flip FlopkarthiksugamNo ratings yet
- Maths Shortcuts For Competitive Exams in INDIADocument34 pagesMaths Shortcuts For Competitive Exams in INDIAA1India.In100% (2)
- Handbook of Noise Control Materials GuideDocument6 pagesHandbook of Noise Control Materials GuidekarthiksugamNo ratings yet
- Banking QuestionsDocument6 pagesBanking QuestionskarthiksugamNo ratings yet
- Anti Lock BrakesDocument20 pagesAnti Lock BrakeskarthiksugamNo ratings yet
- A Seminar On BumpersDocument18 pagesA Seminar On BumperskarthiksugamNo ratings yet
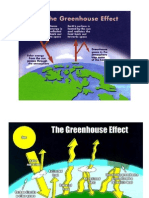
- Greenhouse EffectDocument11 pagesGreenhouse EffectkarthiksugamNo ratings yet
- Thermodynamic Cycles4Document43 pagesThermodynamic Cycles4karthiksugamNo ratings yet
- Operational Amplifiers: Building Blocks of ServosDocument12 pagesOperational Amplifiers: Building Blocks of ServosMasruddin BakshiNo ratings yet
- Whirlpool Case StudyDocument3 pagesWhirlpool Case StudyChandan Dutta33% (3)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Magnaflux Advantage (Whole Catalog)Document51 pagesThe Magnaflux Advantage (Whole Catalog)Andy StkNo ratings yet
- Genesis of Spalling in Tandem Mill Work-RollsDocument9 pagesGenesis of Spalling in Tandem Mill Work-Rolls54321qazNo ratings yet
- Effectiveness Ntu MethodDocument4 pagesEffectiveness Ntu MethodBen Musimane100% (1)
- Aerial Robotics Lecture 1B - 5 Agility and ManoeuvrabilityDocument4 pagesAerial Robotics Lecture 1B - 5 Agility and ManoeuvrabilityIain McCulloch100% (1)
- Company Profile: How Aristagloves Became a Leader in Personal Protective EquipmentDocument16 pagesCompany Profile: How Aristagloves Became a Leader in Personal Protective EquipmentNissaaNo ratings yet
- Fall Protection Marking GuidelinesDocument2 pagesFall Protection Marking GuidelinescuervohijoguachoNo ratings yet
- P1125P1/P1250E1: Output RatingsDocument6 pagesP1125P1/P1250E1: Output Ratingsmohsen_cumminsNo ratings yet
- NPN Silicon Transistor: High Voltage Switch Mode ApplicationDocument6 pagesNPN Silicon Transistor: High Voltage Switch Mode ApplicationManuel PradoNo ratings yet
- FADesignManual v2 14 SP PDFDocument88 pagesFADesignManual v2 14 SP PDFpandu lambangNo ratings yet
- FTS ScaleoEUserManualEN 10 1082177Document2,044 pagesFTS ScaleoEUserManualEN 10 1082177JNo ratings yet
- DTH Equipment - Product - Catalogue - tcm45-3560033 PDFDocument48 pagesDTH Equipment - Product - Catalogue - tcm45-3560033 PDFJALFARORONo ratings yet
- Linthwaite: Conservatio N AreaDocument26 pagesLinthwaite: Conservatio N Areabill baileyNo ratings yet
- (Mamoru Hosaka (Auth.) ) Modeling of Curves and SuDocument363 pages(Mamoru Hosaka (Auth.) ) Modeling of Curves and Suamalendu_biswas_1No ratings yet
- CPU Vs vCPUDocument14 pagesCPU Vs vCPUainseanNo ratings yet
- Calculating The Pressure Tank Size: Where: Q Cut in & Cut OutDocument1 pageCalculating The Pressure Tank Size: Where: Q Cut in & Cut OutEdsel Camiguing LoquillanoNo ratings yet
- Control Valve and Steam Line PDFDocument19 pagesControl Valve and Steam Line PDFRofi MuhammadNo ratings yet
- 59-Form and Plot Frame Editor PDFDocument70 pages59-Form and Plot Frame Editor PDFAries TsaiNo ratings yet
- How To Sputter Thin Films of Metal Onto GlassDocument5 pagesHow To Sputter Thin Films of Metal Onto Glassfred_m_48601No ratings yet
- Joy Global SolutionsDocument18 pagesJoy Global Solutionsjvr001100% (1)
- JETL industrial wastewater treatment reportDocument6 pagesJETL industrial wastewater treatment reportPremKumarNo ratings yet
- Fassmer Freefall - Lifeboat Type CFL (-T) 49 ManualDocument55 pagesFassmer Freefall - Lifeboat Type CFL (-T) 49 Manualkayhan aytugNo ratings yet
- Pump HydraulicsDocument5 pagesPump HydraulicsSiddharth Kharat100% (1)
- Solidworks SyllabusDocument7 pagesSolidworks SyllabusArun SubramanianNo ratings yet
- Stop Motion Pre Production - Negotiated BriefDocument10 pagesStop Motion Pre Production - Negotiated Briefp4nd3m0n1c100% (1)
- Concrete Pipe Installation Guide-CPMDocument17 pagesConcrete Pipe Installation Guide-CPMSankar CdmNo ratings yet
- Solve Process Problems Quickly with Simulation TrainingDocument6 pagesSolve Process Problems Quickly with Simulation TrainingAnonymous qPt2MHzXTNo ratings yet
- Adobe Photoshop: The EditingDocument10 pagesAdobe Photoshop: The EditingMer Cjielo BalloonsNo ratings yet
- Air Conditioning Fact SheetDocument6 pagesAir Conditioning Fact SheetrjchpNo ratings yet
- Preliminary Pin-out for 12 Cylinder Engine Control UnitDocument6 pagesPreliminary Pin-out for 12 Cylinder Engine Control UnitSUELENNo ratings yet
- LB2 UC30 Data Sheet enUS 80218564235Document5 pagesLB2 UC30 Data Sheet enUS 80218564235Ahmed ShawkyNo ratings yet