You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Flight International 13 November 2018Document52 pagesFlight International 13 November 2018Adrian BistreanuNo ratings yet
- Aero Modeller 2016-11Document68 pagesAero Modeller 2016-11CB100% (2)
- INTAP 19-005 (Rev 29) - The Reliability of OFPs - 07MAR23Document4 pagesINTAP 19-005 (Rev 29) - The Reliability of OFPs - 07MAR23Anh NguyenNo ratings yet
- Ata 36 Pneumatic SystemDocument11 pagesAta 36 Pneumatic Systemhector eduardo moya benavidesNo ratings yet
- SLVR Cartas PDFDocument18 pagesSLVR Cartas PDFEdgar David Ruelas ClarosNo ratings yet
- Am Built Fab Assy CK List GyroDocument9 pagesAm Built Fab Assy CK List GyroTonyNo ratings yet
- Power Converter II Lab Waveforms and ExperimentsDocument53 pagesPower Converter II Lab Waveforms and ExperimentsK Kiran VishnuNo ratings yet
- ICAO Doc 8071 Manual on Testing of Radio Navigation AidsDocument22 pagesICAO Doc 8071 Manual on Testing of Radio Navigation AidsAbu AliNo ratings yet
- Gemini 3 PAO TranscriptDocument15 pagesGemini 3 PAO TranscriptBob AndrepontNo ratings yet
- Demag 180T AC435Document20 pagesDemag 180T AC435sidhuaraviiNo ratings yet
- ICAO and FAA Standard Phraseology: A Reference Guide For Commercial Air Transport PilotsDocument26 pagesICAO and FAA Standard Phraseology: A Reference Guide For Commercial Air Transport PilotsLucas de AzevedoNo ratings yet
- The Weathering Aircraft 22 - HIGHLIGHTS&SHADOWSDocument64 pagesThe Weathering Aircraft 22 - HIGHLIGHTS&SHADOWSVelizar Velikov100% (2)
- Placement Grammar Test 1Document4 pagesPlacement Grammar Test 1Ivanka SevenNo ratings yet
- Airbus SOPDocument31 pagesAirbus SOPHENIGUEDRINo ratings yet
- Uji Kekerasan, Impak, KeausanDocument24 pagesUji Kekerasan, Impak, KeausanReynando BagaskoroNo ratings yet
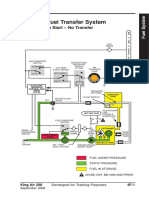
- Auxiliary Fuel Transfer System: Before Engine Start - No TransferDocument14 pagesAuxiliary Fuel Transfer System: Before Engine Start - No TransferAlex GuáncNo ratings yet
- A320 Ata 32Document20 pagesA320 Ata 32KOPHIDA AEROSPACENo ratings yet
- See Export Compliance Paragraph Reverse SideDocument124 pagesSee Export Compliance Paragraph Reverse Sidegugu carterNo ratings yet
- 07 July 1987Document64 pages07 July 1987Monitoring TimesNo ratings yet
- Modeling and Simulation of Wind TurbinesDocument128 pagesModeling and Simulation of Wind TurbinesDaniel_Gar_Wah_HoNo ratings yet
- Shibukumar Interview Aviation Update PDFDocument36 pagesShibukumar Interview Aviation Update PDFshibuNo ratings yet
- Flyboard 2412723958766647Document3 pagesFlyboard 2412723958766647Christopher Lennon Dela CruzNo ratings yet
- A330/A340 (All Series) Airbus: Fire Protection 26Document22 pagesA330/A340 (All Series) Airbus: Fire Protection 26Navid Khalili SafaNo ratings yet
- Anna Univ Cbe Time TableDocument44 pagesAnna Univ Cbe Time TableKrishna KumarNo ratings yet
- Auvsi - Suas 2022 RulesDocument28 pagesAuvsi - Suas 2022 RulesDylan KwongNo ratings yet
- Flow Analyses Inside Jet Pumps Used For Oil WellsDocument10 pagesFlow Analyses Inside Jet Pumps Used For Oil Wellsjoreli100% (1)
- SOP 001.WI-5.Ramp Arrivals ActivityDocument4 pagesSOP 001.WI-5.Ramp Arrivals ActivityTony RandersonNo ratings yet
- Effect of Weight On Stall SpeedDocument2 pagesEffect of Weight On Stall Speedpp2076No ratings yet
- Flyer TR Nrs NP 110315Document2 pagesFlyer TR Nrs NP 110315Le Thanh HaiNo ratings yet
- MECH 313 Engineering Drawing & Design: Lectures 12 and 13Document66 pagesMECH 313 Engineering Drawing & Design: Lectures 12 and 13RUBY_05No ratings yet